Известен автомат для комплексного двухпрофильного контроля зубчатых колес БВ-8010, содержащий измерительный узел, выполненный в виде каретки, датчика, воспринимающего ее иеремещение, измерительного колеса, расположенного на каретке, и неподвижной оправки для установки контролируемого колеса; подающее устройство для установки и снятия контролируемого колеса с оправки; транспортирующее устройство для перемещения контролируемого колеса к подающему устройству и сортировочное устройство, управляемое указанным датчиком. Однако наличие дополнительных устройств для ориентации измерительного и контролируемого колес усложняет автомат и увеличивает время контроля изделия на нем.
Описываемый автомат отличается тем, что транспортирующее устройство выполнено в виде механизма с направляющими для перемещения контролируемого колеса и кареткой с двумя рядами параллельно расположенных вдоль всей ее длины собачек, смещенных одна относительно другой по длиие, а подающее устройство выполнено в виде подвижной в вертикальном направлении платформы, образующей часть направляющих транспортирующего устройства и соосной с оправкой для установки контролируемого колеса, и толкателя расположенного над платформой и служащеio для поджатия контролируемого колеса к платформе. Для предотвращения заклинивания контролируемого колеса при надевании его на оправку платформа и толкатель снабжены центрирующими патронами, каждый из которых выполнен в виде сферической шайбы с плоским торцом и коническим углублением для установки указанной шайбы. Каретка измерительного узла снабжена приводом, кинематически связанным с измерительным колесом, и микропереключателем, взаимодействующим с зубьями этого колеса.
Автомат в таком выполнении нозволяет уменьшить время контроля изделия.
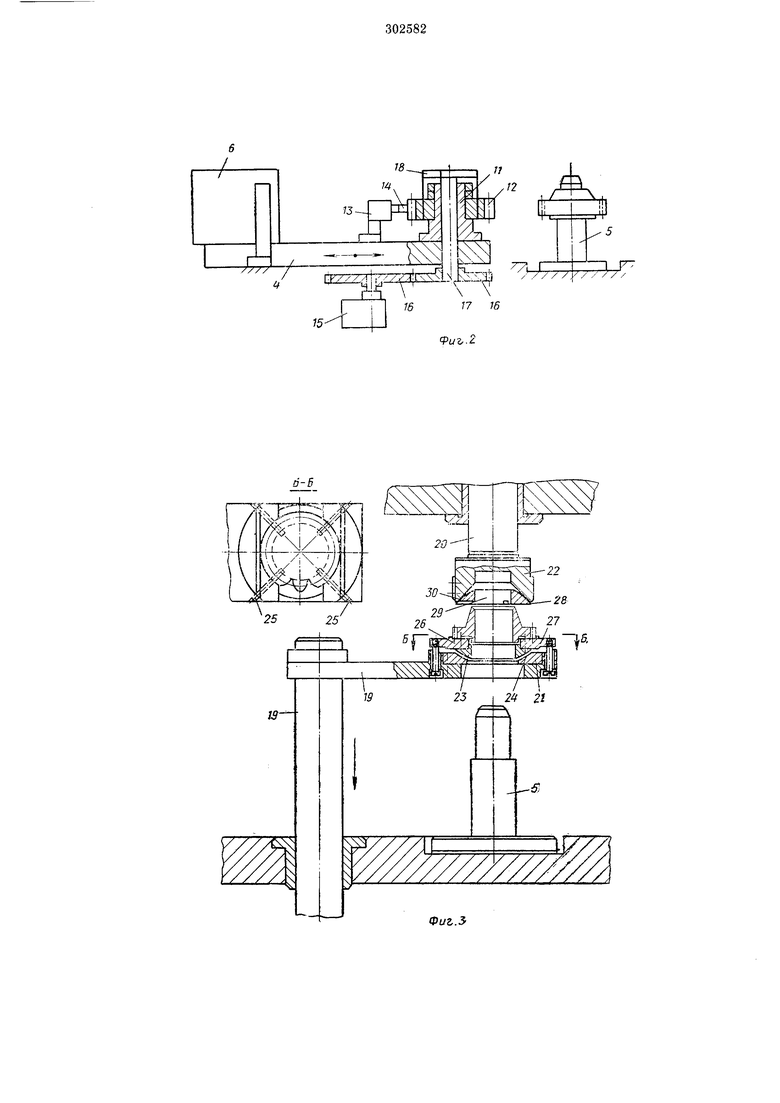
На фиг. 1 изображен автомат, общий вид; на фиг. 2 - измерительный узел; на фиг. 3 - подаюпи-1Й механизм; на фиг. 4 транспортирующее устройство.
Предлагаемый автомат имеет станину /, на плите 2 которой смонтирован измерительиый узел 3, содержащий каретку 4, неподвил ную оправку 5 для базирования контролируемого колеса и датчик 6, воспринимающий перемещение каретки 4 при обкатке колес.
На верхней и нижней частях станины установлено подающее устройство 7 для надевания контролируемого колеса на неподвижную оиравку и снятия его с оправки после контроля. На передней стенке станины укреплено транспортирующее устройство 8 для
псре1мещения контролируемого колеса с позиции загрузки к подающему устройству 7. С левой наружной стороны станины / расположен загрузочный наклонный лоток 9.
Для отвода зубчатых колес, забракованных в процессе контроля, на станине 1 смонтировано сортировочное устройство, выполненное в виде пневматическо -о цилиндра (на чертежах не показан) и отводного лотка 10, на который иневмоцилиндром подаются бракованные детали по команде датчика 6, установленного па измерительном узле 3.
На автомате имеется привод с кулачковым распределительным валом (на чертежах не показан), управляющим движением устройств автомата. На оправке 11 установлено измерительное зубчатое колесо 12 и микропереключатель 13 с нажимным рычагом 14.
С нижней стороны каретки 4 установлен микроэлектродвигатель 15, имеющий передачу к колесу 12 для привода его во вращение через зубчатые колеса 16, валик 17 и поводок/6.
Микронереключатель 13 установлен на каретке так, что постоянно касается рычагом 14 зуба измерительного колеса 12. Когда нажимной рычаг 14 находится во впадине между зубьями измерительного колеса, то контакты микропереключателя занимают разомкнутое положение. Если нажимной рычаг находится на зубе, то контакты микропереключателя 13 замкнуты. Подающее устройство состоит из платформы 19, образующей часть направляющих транспортирующих устройства 8, и толкателя 20. Платформа соотна с неподвижной оправкой 5 измерительного узла 3. Толкатель расположен над платформой и служит для прижатия контролируемого зубчатого колеса к платформе, чем обеспечивает фиксацию колеса и надевание его на оправку. Платформа и толкатель имеют центрирующие патроны 21, 22. Платформа 19 имеет центрирующий патрон 21, выполненный в виде самоустанавливающейся сферической шайбы 23 с плоским торцом, помещенной в коническое углубление 24. Сферическая шайба 23 базируется на платформе 19 посредством упругих элементов 25 (круглые нроволочки) таким образом, что между сферической новерхностью шайбы и коническим углублением имеется небольшой зазор, который обеспечивает поворот шайбы без трения. Ма торце самоустанавливающейея сферической шайбы 23 номещены направл5 юн;ие 26 и 27. Толкатель 20 епабжен центрируюн1им патроном 22, копструктивпо аналогичным натрону 21 платформы. Отличие их лишь в том, что самоустанавливаюп;аяся сферическая шайба 29 висит на упругих элементах 30 в виде изогнутых плоских пружин и в том, что торец 28 шайбы 29 не имеет нанравляющих.
Транснортнрующее устройство 8 имеет каретку 31, па переднем конце которой находнтся отсекатель 32. Вдоль веей каретки с двух сторон укреплены две плапки 33 и 34, па которых установлен :. собачки 35 и 36 для тра Спортировки и ориентации контролируемых колес. Собачки имеют вертикально расположенную ось вращения 37, пружину 38 и регулируемый упор 39, посредством которого носик
собачек выставляется впутрь направля О цих 40 и 41 на определенную величину. Собачки 35 смещены относительно собачек 36 вдоль направля ощей на величину А. также регулировочные винты 42 для перемещення планок 33 и 34 вдоль каретки для установки относительного смещения собачек.
Передняя направля ощая 41 транспортирующего устройства 8 выполнена более , чем цаправля ощая 40. Продолжением этих
направляющих в средней части транспортера направляющие 27 и 26, которые закреплены на патроне 21 платформы 19.
Автомат работает следующим образом. Зубчат з1е контролируемые колеса ноступа от
на автомат по 1а лонному лотку 9, скользя по нему торцовой поверхностью под действием собственного веса. Упором или ограничителем движения зубчатых колес в конце наклонного лотка 9 является длинная направля ощая транспортирующего устройства 5. Каретка 31 на транснортере 8, перемещаясь возвратно-поступательно, при ходе назад переносит отсекатель 32 за первое зубчатое колесо, находящееся а направляющей. При ходе вперед каретка 31 отсекателем 32 неремещает одно (первое) зубчатое колесо вдоль направления движения каретки по 1анравляющим 40, 41 на расстоя ие, ропорционалы ое ходу каретки.
Делая очередной ход, каретка отсекателем перемен1,ает очередное зубчатое колеео, занявшее место первого в конце накло 1ного лотка 9, по направля ощим 40, 41.
Предыдущее же колесо, уже находящееся на
нанравля он:,их, переместится еще далее, но уже двумя противоположными собачками 35 1 36. При движе ии каретки с собачкал вперед одна из собачек 35, выдвинутая вперед о отноше И10 К другой собачке 36, при подходе к зубчатому колесу зацепляет его своим юсиком за один из зубьев и обкатывает зубчатое колесо по нрот воположной направляюн ей 41 до тех пор, пока противоположная собачка 36 ie войдет своим 1 осиком в зацеплепне с зубчатым колесом.
Противоположные собачки нуте.м установки
33 и 34 с помощью регулировочных
.винтов 42 c ie ueHbi одна относитель ю другой
вдоль направля10 цих на величину Л, которая
в момент од овреме п ого касания двумя собачками зубьев колеса обеспечивает определенное всегда постоянное положение их относительно линии, переходящей через цептр базового отверстия перпендикулярно нанравлеии 0 перемещепия зубчатого колеса.
При дальпеЙ л:ем перемепдении каретки 31 сорие 1тированпое зубчатое олесо перемещается на г ла форму 19 нода ощего устройства 7. хода каретки транспортера соответкогда ось его базового отверстия совпадает с осью платформы 19 толкателя 20 и оправки 5 измерительной стапции.
При ходе каретки назад собачки 35 и 36 проскальзывают по зубчатому колесу, не смещая его, поворачиваясь вокруг оси 37 и возвращаясь в исходное положение под действием пружины 38 до соприкосновения с регулируемым упором 39.
После доставки зубчатого колеса на платформу каретка делает ход назад, а толкатель 20 прижимает зубчатое колесо к платформе. В прижатом положении зучатое колесо с платформой и толкателем перемещается вертикально вниз и надевается на неподвижную оправку 5.
Если зубчатое колесо имеет неперпендикулярность торца относительно оси базового отверстия, то при надевании его на оправку происходит разворот его, совместно со сферическими шайбами 29 и 23, центрирующих патронов 21, 22 платформы 19 и толкателя 20. Разворот возможен из-за наличия у сферических щайб некоторой свободы перемещения в пространстве за счет упругих элементов 25 и 30, характера сопрягаемых поверхностей (конус и сфера) и наличия зазора между ними. Разворот зубчатого колеса направлен всегда в сторону выравнивания оси базового отверстия зубчатого колеса относительно оси неподвижной оправки 5. Этим достигается беспрепятственное надевание зубчатого колеса на неподвижную оправку.
При снятии зубчатого колеса с оправки центрирующий патрон 21 платформы 19 самоустанавливается по торцу зубчатого колеса, создавая равномерно-распределенное усилие, направленное вверх по всему торцу, ликвидируя перекос и заклинивание зубчатого колеса на оправке 5.
После надевания зубчатого колеса на неподвижную оправку платформа опускается еще ниже, а толкатель возвращается вверх в исходное положение. Таким образом, злбчатое колесо отверстием и торцом базируется на неподвижной оправке в сориентированном положении зубьев относительно неподвижно стоящего измерительного колеса 12, установленного нри определенном положении зубьев на каретке 4 измерительного узла 3. Каретка вводит измерительное и контролируемое колеса в беззазорное зацепление. Микроэлектродвигатель 15 включается командоаппаратом (не показан на чертежах) и происходит обкат измерительного и контролируемого колес. Изменение межцентрового расстояния А воспринимается кареткой 4 и передается на датчик, который определяет годность зубчатого колеса и дает управляющий сигнал пневматическому цилиндру сортировочного устройства в выхода межцентрового расстояния А за поле допуска.
После обката зубчатых колес, микроэлектродвигатель 15 останавливает вращение измерительного колеса 12 всегда в определенном положении зубьев относительно неподвижно установленного на каретке 4 микропереключателя 13. Это осун1ествляется путем постоянного взаимодействия во время вращения зубьев из зрительного колеса 12 с нажимным рычагом 14. Если нажимной рычаг находится на зубе, то командоаппарат не отключнт микроэлектродвнгатель, т. к. он питается в это время через включенный параллельно основному контакту
командоанпарата замкпутый контакт микропереключателя 13. Как только нажимный рычаг попадает во впадину между зубьями измерительного колеса 12, контакты микропереключателя питающие микроэлектродвигатель 15,
разомкнутся, и измерительное колесо остановится. Таким образом, измерительное колесо 12 останавл1вается после размыкания контакта командоаппарата только в том случае, когда разомкнут п параллельный ему контакт
микропереключателя 13. Путем перемещения микропереключателя с нажимным рычагом по дуге вокруг измерительного колеса выбирается такой останов измерительного колеса 12, чтобы его зуб (впадина) была напротив
впадины (зуба) контролируемого колеса, находящегося в сориентированном положении на транспортере 8. а впоследствии и на неподвижной оправке 5. После останова измерительного колеса измерительная каретка 4 отводится, выводя зубчатые колеса из зацепления в том положении зубьев, в котором они остановились.
Далее платформа 19 средством центрирующего патрона 21 снимает зубчатое колесо
с ненодвижной оправки 5 и поднимает его вертикально вверх до уровня наклонного лотка 9. Еслн колесо забраковано, шток пневмоцилиндра сортировочного устройства перемещается, сталкивая это колесо на лоток 10, откуда она попадает в накопитель брака (на чертеже не показан).
Если колесо годное, то шток цневмоцнлиндра сортировочного устройства не перемещается, и зубчатое колесо остается jia платформе
19 и при дальнейшем ее движении вверх поднимается до уровня направляющих 40, 41 тра11спортпруюн1его устройства 8.
Каретка 31 транспортера 5, делая свой очередной ход вперед, своими собачкамт 35 и 36
переместит годное зубчатое колесо с платформы 19, и на нее поступит следуюн1ее зубчатое колесо. Затем цикл автомата повторяется.
Предложепный автомат можно использовать как в автоматической линии изготовления зубчатых колес, так п в качестве самостоятельного измерительного устройства.
Предмет изобретения
1. Автомат для комплексного двухпрофильного контроля цилиндрических зубчатых колес, содержащий измерительный узел, вынолненный в виде каретки, датчика, воспринимающего ее перемещение, измерительного колеса.
расположенного на каретке, и неподвижной оправки для установки контролируемого колеса; подающее устройство для надевания и снятия контролируемого колеса с оправки; транспортирующее устройство для перемещения контролируемого колеса к подающему устройству и сортировочное устройство, управляемое указанным датчиком, отличающийся тем, что, с целью сокращения времени контроля, трапспортирующее устройство выполнено в виде механизма с направляющими для перемещепия контролируемого колеса и кареткой с двумя рядами параллельно расположенных вдоль всей ее длины собачек, смещенных одна относительно другой но длине, а подающее устройство выполнено в виде подвижной в вертикальном направлении платформы, образующей часть направляющих транспортирующего устройства и соосной с оправкой, для установки контролируемого колеса, и толкателя, расположенного над платформой и служащего для поджатия контролируемого колеса к платформе.
2.Автомат по п. 1, отличающийся тем, что, с целью исключения заклинивания контролируемого колеса при надевании его на онравку, платформа и толкатель снабжены центрирующими патронами, каждый из которых выполнен в виде сферической шайбы с плоским торцом и коническим углублением для установки указанной щайбы.
3.Автомат по п. 1, отличающийся тем, что каретка измерительного узла снабжена приводом, кинематически связанным с измерительным колесом, и микронереключателем, взаимодействующим с зубьями этого колеса.



| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат с электроконтактными датчиками для контроля линейных величин деталей, например клапанов двигателей внутреннего сгорания | 1961 |
|
SU148247A1 |
| Автомат для наматывания в рулон полотна заданной длины | 1973 |
|
SU525605A1 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ ПО ВЕСУ СТЕРЖНЕВЫХ ИЗДЕЛИЙ | 1990 |
|
RU2062665C1 |
| Навивочное устройство автомата для изготовления спиральных пружин | 1977 |
|
SU657894A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| Автомат для сборки изделий типа цепного транспортера | 1973 |
|
SU518316A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU536871A1 |
| Автоматическая револьверная головка | 1990 |
|
SU1776493A1 |
| Автоматический станок с гидравлическим приводом для клеймения | 1960 |
|
SU141406A1 |

Фие. /
15
UTФие.5 «; 3
Фиг. 4 36
