1 .
Изобретение относится к робототехнике и может быть использовано при создании адаптивных роботов.
Известно устройство для управления адаптивным роботом, содержащее фотодатчики, элементы И, триггеры, генератор тактовых импульсов, делитель частоты, х;четчик и регистр памяти 11 .
Однако указанное устройство сложно по конструкции.
Наиболее близким техническим решением к изобретению является устройство, содержащее источник, излучения, линейку фотодатчиков и датчик скорости конвейера 21.
Недостатком данного устройства является тг.кже его сложность, обусловленная наличием большого числа фотодатчи- ков и преобразующих элe ;ентов, а также необходимостью управления перемещением исполнительного органа робота по двум координатам в плоскости конвейера,
Цель изобретения - упрющение устройства.
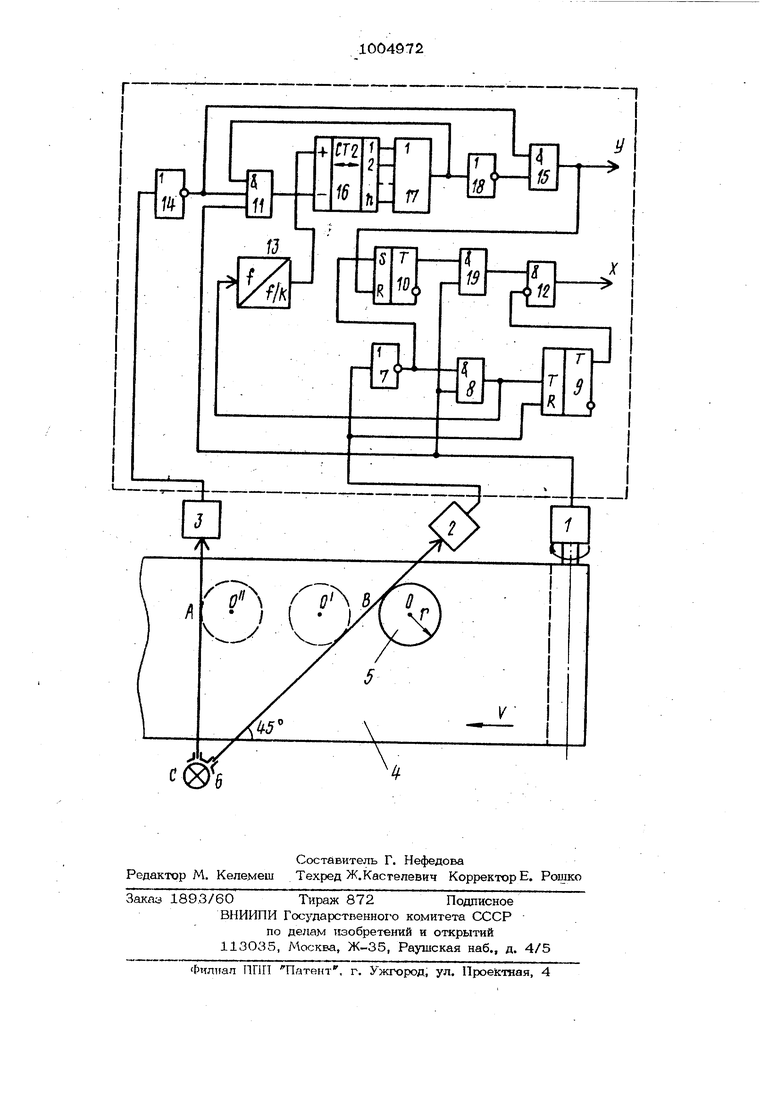
Для достижения цели устройство для : управ-чения адаптивным роботом дополнительно содержит делитель частоты, последовательно соединенные первый элемент НЕ, первый элемент И, первый триггер и элемент ЗАПРЕТ, последовательно подключенные второй элемент НЕ, второй элемент И и реверсивный счет чик, а также последовательно соединенные элемент ИЛИ, третий элемент НЕ, третий элемент И, второй триггер и четвертый элемент И, второй вход которого подключен к выходу датчика скорости конвейера и ко второму входу первого и второго элементов И, а выход - ко второму входу элемента ЗАПРЕТ, выходом соединенного с первым выходом устройства, выход первого фотодатчика подключен ко второму входу первого триггера и ко входу первого элемента НЕ, выход которого соединен со вторым входом второго триггера, выход второго фотодатчика подключен ко входу второго элемента НЕ, выходом соодинешюго со вто- 3.1 рым входом третьего эле(1ента И,выход которого подключен ко второму входу устройства, выход первого элемента И через делитель частоты соединен со вторым входом реверсивного счетчика, выходами подключенного ко входам элемента ИЛИ, выход koToporo соединен со вто рым входом второго элемента И. На чертеже представлена функциональная схема предложенного устройства. Схема включает датчик 1 скорости конвейера, первый и второй фотодатчики 2 и 3 соответственно, конвейер 4, предмет 5, источник 6 излучения, первый элемент НЕ 7, первый элемент И 8 первый и второй триггеры 9 и 1О соответственно; второй элемент И 11, элеме ЗАПРЕТ 12, целитель 13 частоты, второ элемент НЕ 14, третий элемент И 15, реверсивный счетчик 16, элемент ИЛИ 17 третий элемент НЕ 18, четвертый элемент И 19. Кроме того, .на чертеже введены обозначения: X и У - выходные сиг налы устройства; V - скорость перемещения конвейера; г -радиус Гтредмета. Устройство работает следующим обpfiaoM.. . В исходном положении центр схвата робота находится в точке С над источнгасом 6, счетчик 16 и триггеры 9 и 10 устройства обнулены, сигналы X и У также равны нулю. Принцип наведения охвата на центр предмета заключается в том, что схват робота, перемешаемьгй поперечной степени подвижности со скоростью V по катету СА, и предмет, двигаясь по катету равнобедренного Д САБ, встречаются в точке А. Но предмет перекрьгоает луч фотодатчика 2 раньше, чем его центр П оказы,. вается в точке В. Поэтому на отрезке 00 21/2г движения центра предме. та 5, когда перекрыт луч фотодатчикв1 2 схват перемещается со скоростью V/2 . После открытия луча фотодатчика 2 при этом и центр схвата и центр О предмета 5 оказьшаются на расстоянии Н BA-RVJ от точки А. Теперь предмет 5 и схват двигаются со скоростью V и их центры совмещаются в точке А. OдJiaко, когда предмет 5 перекрьтает луч фотодатчика 3, его центр О и центр схвата отстоят от точки А на расстоякии 1- , и поэтому команда Y на захват предмета 5 должна выдаваться после того, как предмет 5 и схват еще пройдут путь, равный г . Радиус г вычисляется при перекрыттга предметом луча фотодатчика 2. Число импульсов, прошедших за 724 этот промежуток времени с датчика 1, пропорционально 2V2r (отрезок ОО ZV2r) Радиус определяется депением частоты импульсов на К . При перекрытии предметом 5 луча фотодатчкка 2 по сигналу с элемента НЕ 7 срабатътает триггер 10, и импульсы с датчика 1 перемещения конвейера через элемент И 19 и прямой вход элемента ЗАПРЕТ 12 идут по выходу X на привод поперечной степени подвижности робота. Одновременно, пока перекрыт луч фотодатчика 2, импульсы датчика 1 через элемент И 8 поступают на счетный взюд триггера 9, с выхода которого с вдвое меньшей частотой импульсы идут на инверсный вход элемента ЗАПРЕТ 12, вычеркивая каждый второй импульс, прошедший на прямой вход. Схват при этом начинает двигаться из точки .С вдоль луча СА со скоростью V//2 . Одновременно импульсы датчика 1 через элемент И 8, делитель 13 частоты импульсов приходят на суммируюший вход счетчика 16. К моменту выхода предмета из-под луча фотодатчика 2 в счетчике 16 находится код радиуса г. предмета. После выхода предмета из-под луча фотодатчика 2 импул сы датчика 1 через элемент И8 не проходят на триггер 9, триггер 9 переводится сигналом в нулевое положение и каждый импульс датчика 1 через элемент И 19, элемент ЗАПРЕТ 12 проходит на выход X. Схват начинает перемещаться со скоростью V . При перекрытии предметом луча фотодатчика 3 импульсы с датчика 1 через элемент И 11 проходят на Ьычитающий вход счетчика 16. Когда счетчик 16 обкулится, т.е. предмет пройдет расстояние АО , через элементы ИЛИ 17, НЕ 18 и И 15 вьщается сигнал о совмещении центров схвата и предмета 5, Одновременно триггер 10 переводится в нулевое положение, прерьшая управление приводом поперечной степени подвижности робота по выходу X, и управление передается системе программного управления роботом, которая осуществляет захват предмета 5. Применение изобретения позволяет упростить устройство. Формула изобретения Устройство для управления адаптивным роботом, содержащее источник ,
первый и второй фотодатчики и датчик скорости конв:ейера, отличающееся тем, что, с целью упрощения уст ррйства, оно содержит делитель частоты, последовательно соединенные первый элемент НЕ, первый элемент И, первый триггер и элемент ЗАПРЕТ, последовательно подкЛоченные второй элемент НЕ, второй. элемент И и реверсивный счетчик, а также последовательно соединенные .элемент ИЛИ, третий элемент HEj третий элемент И, второй. триггер и четвертый элемент И, второй вход которого подключен к выходу датчика скорости конвейера и ко второму входу первого и второго элементов. И, а выход - ко второму входу элемента ЗАПР1ЕТ, выходом соединенного с первым выходом устройства, вькод первого фотодатчика подключен ко второму входу первого
триггера и ко входу первого элемента НЕ выход которого соединен со вторым ЕЯОдом второго триггера, выход второго фотодатчика подключен ко входу второго элемента НЕ, выходом соединенного со вторым входом третьего элемента И, выход которого подключен.ко второму входу устройства, выход первого,элемейта И через делитель частоты соединен со вто- рьйл входом реверсивного счетчика, выходами подключенного ко входам элемента ИЛИ, выход которого соединен со вторым входом второго элемента И.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 455322, кл. Q 05 В 15/00, l974,
2.Авторское свидетельство СССР № 491929, кл. G О5 В 15/О2, 1975
I(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1982 |
|
SU1121645A1 |
| Устройство для управления адаптивным роботом | 1982 |
|
SU1115015A1 |
| Устройство для управления адаптивным роботом | 1985 |
|
SU1305028A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство для определения центров круглых предметов | 1983 |
|
SU1095135A1 |
| Устройство для счета штучных предметов, перемещаемых конвейером | 1982 |
|
SU1084844A1 |
| Устройство для счета штучных предметов, перемещаемых конвейеров | 1978 |
|
SU744679A1 |
| Устройство для управления сборочным роботом | 1984 |
|
SU1236418A1 |