1
Изобретение относится к области вычислительной техники и автоматики и .может быть использовано для управления роботами-манипуляторами, предназначенными для обслуживания техпологически.х конвейеров па предприятиях по производству кирпича, металлургических, машиностроительных, приборостроительных и других заводах.
Известно устройство для управления роботом-манипулятором технологического конвейера, которое позволяет определять местоположение круглых изделий на движупдейся ленте конвейера и обеспечивает вывод охвата робота-манипулятора на центр изделий и их снятие с конвейера. Оно содержит линейку фотодатчиков конвейера, регистр сдвига, разряд которого соединен с соответствующим фотодатчиком конвейера, первую схему «И, первый вход которой подключен к выходу младшего разряда регистра сдвига, первую схему «ИЛИ, один из входов которой соединен с выходом первой схемы «И, а выход подключен к управляемому исполнительному двигателю механизма поперечного перемещения схвата, первый триггер, вторую схему «И, первый вход которой соединен с нулевым выходом первого триггера, а выход -со вторым входом первой схемы «ИЛИ, вторую схему «ИЛИ, входы которой подключены к соответствующим фотодатчикам конвейера.
2
второй триггер, вход которого соединен с выходом второй схемы «ИЛИ, третью схему «И, выход которой подключен к сдвпгающему входу регистра сдвига, четвертую схему
«И, двоичный счетчик, пятую схему «И, первый вход которой соединен с выходом предпоследнего разряда двоичного счетчика, и шестую схему «И. Выход основной частоты генератора тактовых импульсов подключен ко
второму входу третьей схемы «И, выход половинной частоты - ко второму входу первой схемы «И.
Недостатком известного }стройства является его ограниченные функциональные возможности, поскольку оно определяет только координаты центра изделия, но не определяет его ориентацию на конвейере. Робот-манипз лятор, оснащенный известным устройством, может снимать с конвейера только изделия круглой формы, так как их ориентация безразлична.
Целью изобретения является расширение функциональных возможностей устройства, заключающееся в определении ориентации издеЛИЙ, имеющих прямоугольную или близкую к ией форму.
Поставленная цель достигается тем, что устройство содержит третью схему «Р1ЛИ, первый вход которой соединен с выходом третьей
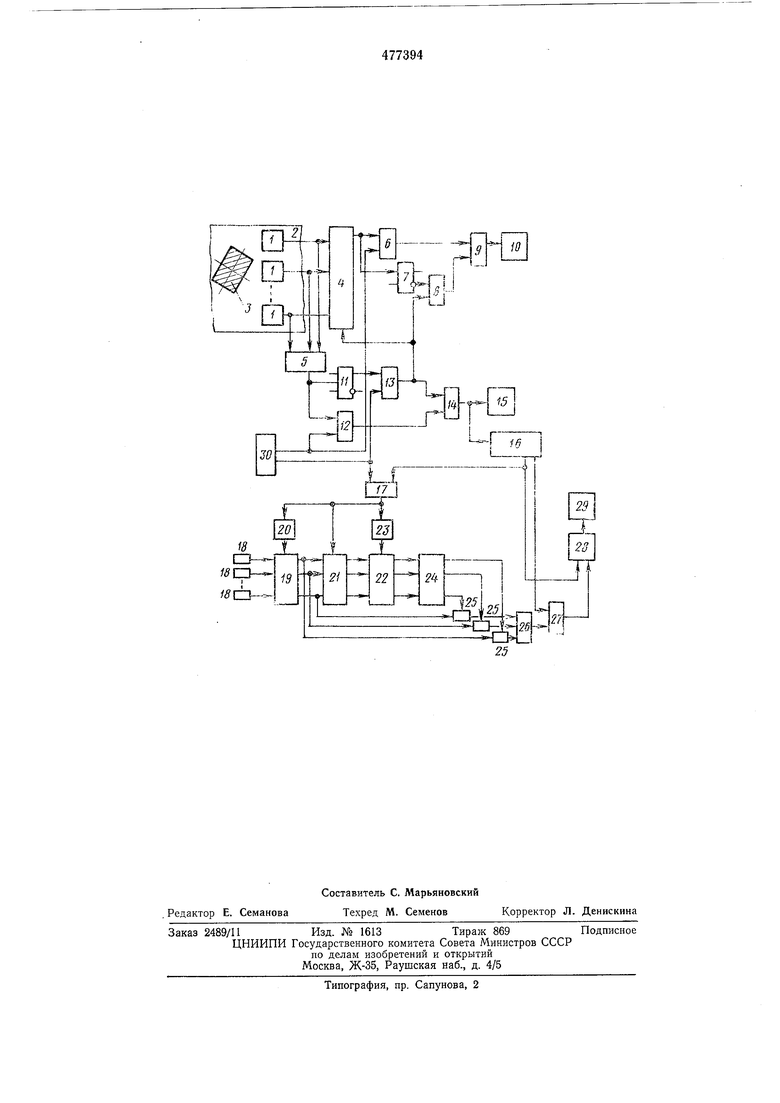
схемы «И и со вторым входом второй схемы «и, второй вход соединен с выходом четвертой схемы «И, первый вход которой подключен к выходу второй схемы «ИЛИ, а второй ВХОД-к выходу половинной частоты генератора тактовых импульсов, а выход третьей схемы «ИЛИ подключен к двоичному счетчику и к управляемому двигателю механизма продольного перемещения охвата. Сигнальные входы первого блока разрешения записи подключены к фотодатчикам схвата. Вход первой схемы задержки подключен к выходу пятой схемы «И, а выход - к управляющему входу первого блока разрещения записи. Регистр записи подключен поразрядно к выходам первого блока разрешения записи. Сигнальные входы второго блока разрешения записи подключены к соответствующим выходам регистра записи. Вход второй схемы задержки соединен с выходом пятой схемы «И и со входом установки нуля регистра записи, а выход подключен к управляющему входу второго блока разрешения записи. Регистр памяти подключен поразрядно к выходам второго блока разрешения записи. Первые входы сумматоров по модулю два подключены к соответствующим выходам регистра памяти, а вторые - к выходам первого блока разрешения записи. Входы четвертой схемы «ИЛИ соединены с выходами сумматоров по модулю два, а выход-с первым входом шестой схемы «И, второй вход которой подключен к выходу последнего разряда двоичного счетчика. Первый вход блока управления схватом соединен с выходом шестой схемы «И, второй вход-с выходом предпоследнего разряда двоичного счетчика, а выход подключен к силовому приводу схвата. Вход первого триггера соединен с выходом младшего разряда регистра сдвига, второй вход пятой схемы «И подключен к выходу основной частоты генератора тактовых импульсов, а первый вход третьей схемы «И соединен с единичным выходом второго триггера. На чертеже представлена блок-схема предлагаемого устройства. Оно содержит фотодатчики конвейера 1, конвейер 2, изделие 3, регистр сдвига 4, вторую схему «ИЛИ 5, первую схему «И 6, первый триггер 7, вторую схему «И 8, первую схему «ИЛИ 9, управляемый двигатель механизма поперечного перемещения схвата 10, второй триггер 11, четвертую схему «И 12, третью схему «И 13, третью схему «ИЛИ 14, управляемый двигатель механизма продольного перемещения схвата 15, двоичный счетчик 16, пятую схему «И 17, фотодатчики схвата 18, первый блок разрешения записи 19, первую схему задержки 20, регистр записи 21, второй блок разрешения записи 22, вторую схему задержки 23, регистр памяти 24, сумматоры по модулю два 25, четвертую схему «ИЛИ 26, шестую схему «И 27, блок управления схватом 28, силовой привод схвата 29 и генератор тактовых импульсов (ГТИ) 30. 5 10 15 20 25 30 35 40 45 50 55 60 g5 Фотодатчики конвейера 1 располагаются над ленточным конвейером 2, на котором перемещаются изделия прямоугольной формы 3. Каждый фотодатчик соединен с соответствую щим входом регистра сдвига 4 и со второй схемой «ИЛИ. Число разрядов регистра сдвига 4 равно числу фотодатчиков. Выход младшего разряда регистра сдвига подключен к одному из входов первой схемы «И 6 и к единичному входу первого триггера 7, нулевой выход которого подключен к одному из входов второй схемы «И 8. Входы первой схемы «ИЛИ 9 подключены к выходам первой и второй схем «И, а выход - к управляемому двигателю механизма поперечного перемещения схвата 10. Выход второй схемы «ИЛИ 5 подключен к одному из входов четвертой схемы «И 12 и ко входу синхронизации второго триггера И (типа /-k), единичный выход которого соединен с одним из входов третьей.схемы «И 13. Входы третьей схемы «ИЛИ 14 подключены к выходам третьей и четвертой схем «И, причем выход третьей схемы «И 13 также подключен ко второму входу второй схемы «И 8 и к сдвигающему входу регистра сдвига 4. Выход третьей схемы «ИЛИ 14 подключен ко входу двоичного счетчика 16 и ко входу управляемого двигателя механизма продольного перемещения схвата 15. Выход предпоследнего разряда двоичного счетчика 16 подключен к одному из входов пятой схемы «И 17. Линейка фотодатчиков схвата 18 укреплена жестко на схвате перпендикулярно его губкам. Каждый из фотодатчиков схвата соединен с соответствующим сигнальным входом первого блока разрешения записи 19, управляющий вход которого через первую схему задержки 20 подключен к выходу пятой схемы «И 17. Выходы первого блока разрешения записи 19 подключены к соответствующим входам регистра записи 21, вход установки нуля которого соединен с выходом пятой схемы «И 17. Выходы регистра записи 21 соединены с соответствующими сигнальными входами второго блока разрешения записи 22, управляющий вход которого через вторую схему задержки 23 подключен к выходу пятой схемы «И 17, а выходы - к соответствующим входам регистра памяти 24. Выходы регистра памяти подключены к первым входам сумматоров по модулю два 25, вторые входы которых подключены к соответствующим выходам первого блока разрешения записи 19, а выходы - к четвертой схеме «ИЛИ 26. Выход четвертой схемы «ИЛИ подключен к одному из входов шестой схемы «И 27, второй вход которой подключен к выходу последнего разряда двоичного счетчика 16, а выход - к одному из входов блока управления схватом 28. Второй вход блока управления схватом соединен с выходом, предпоследнего разряда двоичного счетчика 16, а выход - с силовым приводом схвата 29. Выход основной частоты ГТИ 30 подключен ко вторым входам третьей и пятой
схем «И, а выход половинной частоты - ко вторым входам первой и четвертой схем «И.
Устройство работает следующим образом.
Линейка фотодатчиков конвейера 1 располагается над лентой конвейера 2 перпендикулярно направлению его движения. Число фотодатчиков конвейера 1 и расстояние между ними определяются шириной ленты конвейера и требуемой точностью определения местоположения изделия. В процессе движения на ленте изделие 3 попадает в зону чувствительности фотодатчиков конвейера 1. Сигналы от сработавших фотодатчиков поступают на входы соответствующих разрядов регистра сдвига 4 и запоминаются в нем. За время прохождения изделия под линейкой фотадатчиков конвейера 1 в регистре сдвига 4 формируется «проекция изделия на поперечную ось в виде совокупности «1, записанных в соответствующих разрядах регистра. Эта информация используется для определения поперечной координаты центра изделия. Определение продольной координаты осуществляется косвенно путем регистрации промежутка времени, в течение которого изделие проходит зону чувствительности фотодатчиков конвейера 1. Одновременно с определением координат центра изделия производится вывод в эту точку схвата манипулятора.
Проследим управление продольныл перемещением схвата.
В исходном состоянии схват манипулятора находится над крайним фотодатчиком конвейера 1. В момент подхода края изделия к зоне чувствительности фотодатчиков конвейера 1 на выходе второй схемы «ИЛИ 5 появляется сигнал «1, открывающий по первому входу четвертую схему «И 12, на второй вход которой поступают импульсы половинной частоты ГТИ 30
С выхода четвертой схемы «И 12 эти импульсы через третью схему «ИЛИ 14 подаются на управляемый двигатель механизма продольного перемещения схвата 15 роботаманипулятора. Манипулятор двигается при этом со скоростью вдвое меньшей, чем конвейер. За время прохождения изделием зоны чувствительности фотодатчиков конвейера 1 схват проходит расстояние, равное половине «нроекции изделия на продольную ось, и оказывается на линии, проходящей через центр изделия. С окончанием сигнала на выходе второй схемы «ИЛИ 5 (в момент выхода изделия из зоны чувствительности фотодатчиков конвейера 1) четвертая схема «И 12 закрывается по первому входу, а второй триггер 11 (типа /-k) переходит в единичное состояние и открывает по первому входу третью схему «И 13. В результате этого на управляемый двигатель механизма продольного перемещения схвата 15 начинают поступать импульсы основной частоты ГТИ. Скорость движения манипулятора увеличивается вдвое и становится равной скорости конвейера. В этот же момент начинается управление поперечным перемещением схвата манипулятора. Импульсы основной частоты с выхода схемы «И 13 подаются на сдвнгающнй вход регистра сдвига 4 и осуществляют сдвиг содержимого регистра в сторону младших разрядов.
Анализируется состояние младшего разряда регистра сдвига 4. Пока в нем «О, первая схема «И будет закрыта, а вторая схема «И 8 открыта, т. к. первый триггер 7 находится
в нулевом состоянии, и на управляемый двигатель механизма поперечного перемещения схвата 10 поступают импульсы основной частоты ГТИ. Сдвигу содержимого регистра сдвига 4 на один разряд соответствует при этом
перемещение схвата на один дискрет (расстояние между соседними фотодатчиками). Как только в крайнем разряде регистра сдвига 4 появляется «1, первый триггер 7 переходит в единичное состояние, вторая схема «И 8
закрывается, а первая схема «И 6 открывается, и на управляемый двигатель механизма поперечного перемещения схвата 10 поступают импульсы половинной частоты ГТИ, поэтому перемещению схвата на один дискрет соответствует сдвиг содержимого регистра сдвига на два разряда. Когда в крайнем разряде регистра сдвига 4 снова появляется «О, поперечное движение схвата прекращается, и он оказывается над центром изделия. В процессе движенин схвата над центром изделия определяется ориентация изделия на ленте конвейера с целью взятня его губками схвата за длинные стороны. Для этого осуществляется ротация схвата относительно вертикальной оси на
180°. Момент начала ротации задастся коэффициентом пересчета двоичного счетчика 16, сигнал с выхода предпоследнего разряда которого подается на блок управления схватом 28. Одновременно этот сигнал открывает по
первому входу пятую схему «И 17, на второй вход которой поступают импульсы основной частоты ГТИ. С выхода пятой схемы «И эти импульсы подаются на вход установки нуля регистра записи 21 и после задержек - на управляющие входы первого и второго блоков разрещения записи. В каждом такте осуществляются последовательно следующие операции: обнуление регистра записи, опрос фотодатчиков схвата и запись кода их состояния
в регистр записи, выдача содержимого регистра записи. В исходном состоянии во всех разрядах регистра памяти 24 устанавливается «1. Входы и выходы второго блока разрешения
записи 22 подключены таким образом, что при подаче на его управляющий вход сигнала разрешения записи выполняется поразрядная конъюнкция содержимого регистра .памяти 24 и регистра записи 21, причем результат операции записывается в регистр памяти 24. В результате за время совершения схватом половины оборота в регистре памяти записывается код, соответствующий минимальному размеру прямоугольного изделия, т. е. длине его коротной стороны, Сигнал с выхода последнего
разряда двоичного счетчика 16 открывает по первому входу шестую схему «И 27. Прекращается автономное вращение схвата. Код состояния фотодатчиков схвата 18, соответствующий текущей ориентации линейки фотодатчиков схвата, подается на сумматоры но модулю два 25, где поразрядно складывается с кодом регистра памяти 24, который является минимальным для данного изделия. До тех пор, пока схват не расположится губками параллельно длинным сторонам изделия, код фотодатчиков больше минимального и с выхода четвертой схемы «ИЛИ 26 на блок управления схватом 28 поступают сигналы управления, вызывающие дальнейший поворот схвата. При совпадении кодов, что соответствует необходимой ориентации схвата, на выходе четвертой схемы «ИЛИ будет «О, и вращение схвата прекращается. После этого схват опускается и берет изделие.
Предлагаемое устройство может быть изготовлено на тиновых логических элементах, выпуск которых хорошо освоен отечественной промышленностью.
Предмет изобретения
Устройство для управления роботом-манипулятором технологического конвейера, содержащее линейку фотодатчиков конвейера, регистр сдвига, каждый разряд которого соединен с соответствующим фотодатчиком конвейера, первую схему «И, первый вход которой подключен к выходу младшего разряда регистра сдвига, первую схему «ИЛИ, один из входов которой соединен с выходом первой схемы «И, а выход подключен к управляелюму двигателю механизма поперечного перемещения схвата, первый триггер, вторую схему «И, первый вход которой соединен с нулевым выходом первого триггера, а выход- со вторым входом первой с.хемы «ИЛИ, вторую схему «ИЛИ, входы которой подключены к соответствующим фотодатчикам конвейера, второй триггер, вход которого соединен с выходом второй схемы «ИЛИ, третью схему «И, выход которой подключен к сдвигающему входу ре:истра сдвига, четвертую схему «И, Л;;);:чпьМ| гчстчнк, пятую cxi.-My , первый вход которой соединен с выходом предпоследнего разряда двоичного счетчика, шестую схему «И и генератор тактовых импульсов, выход основной частоть которого подключен ко второму входу третьей схемы «И, выход половинной частоты - ко второму входу первой схемы «И, о т л и ч а ю щ е е с я тем, что, с целью расширения функциональных возможиостей устройства, оно содержит третью схему «или, первый вход которой соединен с выходом третьей схемы «И и со вторым входом второй схемы «И, второй вход соединен с выходом четвертой схемы «И, первый вход
которой подключен к выходу второй схемы «Р1ЛИ, а второй вход - к выходу половинной частоты генератора тактовых импульсов, а выход третьей схемы «ИЛИ подключен к двоичному счетчику и к управляемому двигателю механизма продольного перемещения схвата, фотодатчики схвата, первый блок разрешения записи, сигнальные входы которого подключены к фотодатчикам схвата, первую схему задержки, вход которой подключен к
выходу пятой схемы «И, а выход - к управляющему входу первого блока разрешения записи, регистр записи, подключенный поразрядно к выходам нервого блока разрешения записи, второй блок разрешения записи, сигнальные входы которого подключены к соответствующим выходам регистра записи, вторую схему задержки, вход которой соединен с выходом пятой схемы «И и со входом установки нуля регистра записи, а выход подключен к управляющему входу второго блока разрешения записи, регистр памяти, подключенный поразрядно к выходам второго блока разрешения записи, сумматоры по модулю два, первые входы которых подключены к соответствующим выходам регистра памяти, а вторые- к выходам первого блока разрещения залиси, четвертую схему «ИЛИ, входы которой соединены с выходами сумматоров по модулю два, а выход - с первым входом шестой
схемы «И, второй вход которой подключен к выходу последнего разряда двоичного счетчика, блок зправления схватом, первый вход которого соединен с выходом щестой схемы «И, второй вход - с выходом предпоследнего разряда двоичного счетчика, а выход подключен к силовому приводу схвата, причем вход первого триггера соединен с выходом младшего разряда регистра сдвига, а второй вход пятой схемы «PI подкл очс{1 к ;ылоду ociioBiioii частоты генератора тактовых импульсов, а первый вход третьей схемы «И соединен с единичным выходом второго триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для управления сортировкой штучных изделий | 1982 |
|
SU1375535A1 |
| Устройство для подсчета штучных предметов,перемещаемых конвейером | 1985 |
|
SU1265817A1 |
| Устройство для определения центров круглых предметов | 1983 |
|
SU1095135A1 |
| Устройство контроля линейных размеров движущихся изделий | 1982 |
|
SU1146550A1 |
| Устройство для формирования спектров с постоянным относительным разрешением по направлениям | 1984 |
|
SU1229775A1 |
| Система экстремального регулирования | 1985 |
|
SU1352452A1 |
| ИНФОРМАЦИОННО-ПОИСКОВАЯ СИСТЕМА | 2001 |
|
RU2199778C1 |
| Устройство для извлечения квадратного корня | 1984 |
|
SU1246091A1 |