Изобретение относится к робототехнике и может быть использовано при создании сборочных роботов, обепечиваюн.1Ил нро- цесс сборки деталей на движундемся конвей ере.
Цель изобретения - повышение быстродействия и надежности устройства за счет увеличения времени синхронного робота и конвейера.
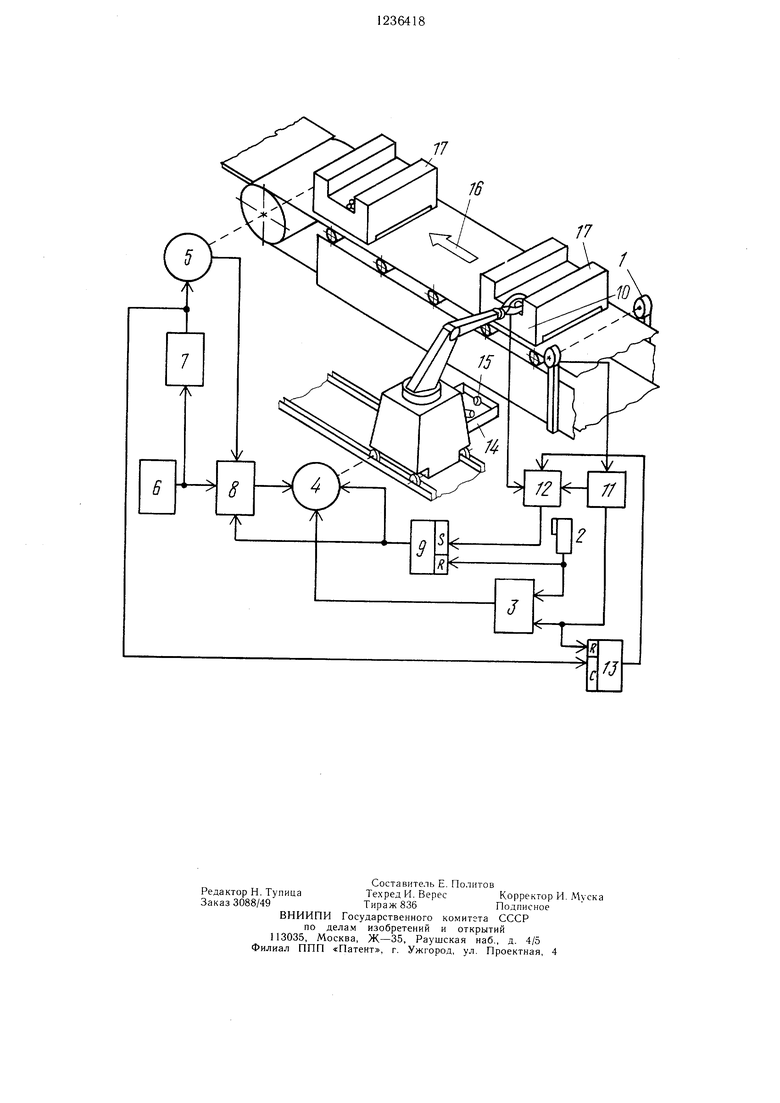
На чертеже представлена функциональ- пая схема устройства.
На схеме указаны: фотодатчик 1, датчик 2 начального положения, нервый триггер 3, привод 4 робота, г.ривод 5 конвейера, генератор 6 и.мнульсов, де.:1ите;|ь 7 частоты, коммутатор 8, второй 9, датчик 10 установки детали, формирователь 11 импульсов, элемент ИЛИ 12, счетчик 13, накопитель 14 заготовок, за1Ч)товкп 15, конвейер 16,изделия 17.
Устройство работает следуюндим образом.
Собираемое изделие 17 перемеи1аетея на конвейере 16 с 1омоп1ью привода 5, на ко- тор,1Й че|)сз делитель 7 частоты поступают ч1)авляюпи1е импульс1 1 с генератора 6. Робот находится в начальном положении, ре- гистрируег 1ом, например, датчиком 2. Мо- меп г поетунления изделия 17 на участок сб()|)ки регистрируется фотодатчпком 1. Формирователь 11 формирует импульсы по фропту и срезу сигнала е фотодатчика 1. Соответстненно по импульсу среза с второго выхода формирователя 11 срабатывает триггер 3, е выхода которого разре1наетея работа привода 4. П)иводом 4 управляет исходно замкнутая коммутатор 8 пеиь электрического ва;1а .между Г1риво.дами 5 и 4.
Да.. 1ьпеЙ1пее переме1цение робота синхронизируется с нере.мен;епием изделия 17 электричес кн м ва.пом.
Пос.ме г.ьпюлпержя операции по установке заготовки 5 в изделие 17 срабатывает датчик 10 установки. По сигналу с датчика 10 оп)оки.1ывается триггер 9, еигналом с которого по третьим входам привода 4 и коммутатора 8 включаются соответственно реверс привода 4 и управление приводом 4 от геператора 6 через коммутатор 8.
Поскольку на привод 4 импульсы упр.ав- ления поступают непосредственно с генератора 6 без деления частоты, возврап1.ение робота в исходное состояние производится ускореппо.
При возврап1енпи робота в исходпое состояние срабатывает датчик 2, п си|-па,л с его выхода поступает па соответству1ои1ИР входы триггеров 3 и 9 и приводит их в исходное состояние. (оответстве що привод 4 и коммутатор 8 приводятся в исходное состояние. HHK;I повторяется с приходом нового изде. гия 17.
5
0
При отсутствии заготовок 15 в накопителе 14 или задержке установки заготовки 15 на время, болыпее времени нахождения изделия 1.7 в зоне действия робота, т. е. при отсутствии сигнала с датчика 10, появляется сигнал на выходе счетчика 13, который воздействует через третий вход элемента 12 на движение робота аналогично сигналу с датчика 10 и возвращает робота в исходное состояние.
Ь1ачало отсчета счетчиком 13 времени нахождения робота в зоне сборки определяется сигналом (импульс спада) с формирователя 11, обнуляюгцим счетчик 13. При задержке установки заготовок 15 на изделие с приходом очередного изделия 17 сигнал (импульс по фронту) с первого выхода формирователя 11 возвращает через элемент ИЛИ 12 робота в исходное состояние аналогично сигналу с датчика 10.
Таким образом, устамовка накопителя 14 с заготовками 15 на корпусе робота позволяет сократить время на вспомогательные операпии за счет иеключения ускоренного движения к накопителю и с заготовкой к изделию.
Формула изобретения
Устройство для управления сборочным роботом, содержащее накопитель заготовок, .генератор импульсов, привод конвейера, фотодатчик, счетчик и последовательно соединенные первый триггер и привод робота, отличающееся тем, что, с целью по- вьииения его быетродействия и надежност.и,
оно содержит датчик начального положения, датчик установки детали, делитель частоты и последовательно соединенные фор.миро- ватель импульсов, элемент ИЛИ, второй триггер и коммутатор, второй выход которого подключен к выходу привода конвейера,
0 третий вход --- к входу делителя частоты и выходу генератора импульсов, а выход - к первому входу привода робота, соединенного третьим входом с выходом второго триггера, второй вход которого подключен к выходу датчика начального положения и первому входу первого триггера, соединенного вторым входом с первым входом счетчика и вторым выходо.м формирователя им- иу;и;сов, вход которого подключен к выходу фотодатчика, второй вход элемента ИЛИ соединен с выходом датчика установки детали, третий вход - с вьгходом счетчика, подключенного вторым входом к входу привода конвейера и выходу де.чителя частоты, а накопитель заготовок установлен на корпусе робота.
5
0
77
17
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1978 |
|
SU781756A1 |
| Устройство для управления роботом-окрасчиком | 1984 |
|
SU1254436A2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЛИНЫ | 1998 |
|
RU2148789C1 |
| Устройство для счета предметов,перемещаемых конвейером | 1983 |
|
SU1095208A1 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для автоматической загрузки изделия в индукционный методический нагреватель | 1988 |
|
SU1502639A1 |
Изобретение относится к робототе.хнике и может быть использовано при создании сборочных роботов, обеспечивающих конвейерную сборку изделий. В устройстве за счет введения датчиков начального положения и установки детали, делителя частоты, формирователя импульсов, элемента ИЛИ, второго триггера и коммутатора, а также установки накопителя заготовок на корпусе робота увеличивается время синхронного перемещения конвейера и робота, что по- выщает быстродействие и надежность ггро- цесса сборки. 1 ил. I4D СО 05 4
| Промышленная робототехника./Под ред | |||
| Шифрина.-М.: Машиностроение, 1982 | |||
| Устройство для управления сборочным роботом | 1978 |
|
SU781756A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
