1
Изобретение относится к области вычислительной техники и автоматики и может найти применение в устройствах управления роботами-манипуляторами, предназначенными д.ля обслуживания технологических конвейеров.
Во многих отраслях иромышленности все шире применяются роботы-маиипуляторы, заменяющие ручной труд человека на вспомогательных операциях, связанных с переноской предметов в определенное место, снятием предметов с конвейера и их укладкой, сортировкой предметов на конвейере и т. д. Для снятия предметов с ленты конвейера, роботманипулятор должен определить местоположение каждого из нпх. У предметов круглой формы достаточно определить лишь координаты их центров.
В известных роботах-манипуляторах для обслуживания технологических конвейеров определение координат центра предметов осуществляется в два этаиа. Перед началом работы на этапе «Обучение образец нредмета помещается в определенном месте на неиодвижпую ленту конвейера. Схват робота-манипулятора перемещается вручную таким образом, чтобы рабочая точка схвата оказалась над центром предмета. В этом положенпи схват останавливается и происходит заннсь в память данных об орнентации в иространстве каждого звена робота-манипулятора. На втором (рабочем) этане лента конвейера с предметамп перемещается. Пропзводнтся считывание из памяти записанных ранее данных н преобразование их в сигналы уиравления. Схват роботаманипулятора иод действием этих сигиалов из исходного положения перемещается до ге.х пор, пока все его звенья не займут положеи 1я, зафиксированного на этапе «Обучение. Для того, чтобы схват снял предмет с ленты конвейера, предмет должен паходнтся в том же месте на ленте, что н образец, т. е. требуется предварптельная онерацня по укладке их в строго определенное место на ленте конвейера.
Подобным образом осуществляется определение центра предметов в известном роботеманипуляторе.
Блок памятп такого робота-манипулятора выполнен в виде магнитного барабана, разделенного на сектора. Запись в память данных по каждой степени свободы производится в свой сектор магнитного барабана ирц помощи блоков ввода данных о местоиоложенпи иредметов па лейте конвейера. Эти блоки выполнены в впде кодпрующих устройств, которые преобразуют данные об ориентацпп в пространстве звеньев маннпулятора в цифровой код, записываемый на магнитный барабан иамяти прп помощи записывающих головок. lia втором (рабочем) этапе данные с магнитиого барабана через считывающие головки иоступают
па компараторы, где преобразуются в сигналы управлепня исполнительными мехапизмами звеньев манипулятора.
Целью изобретения является расширение области применения, увеличение быстродейстВИЯ и уиропдение устройства. Поставленная цель достигается тем, что устройство co/iepжит последовательно соединенные генератор тактовых импульсов и делитель частоты, первый триггер, единичный вход которого иодключей к выходу делителя частоты, управляющую схему «И, первый вход которой подк.чючен к единичному выходу иервого трпггера, а второй вход - к выходу генератора тактооых импульсов, счетчик, счетный вход которого подключен к выходу управляюндей схемы «И, вход установки нуля - к выходу делителя частоты, а выход - к нулевому входу иервого триггера, второй триггер, счетный вход которого подключен к выходу управляющей схемы «И, регистр выделения центра, соответствующие входы которого подключены к единичному и иулевому выходам второго триггера, схемы «И считывания и схемы «И записи. Первые входы этих схем иодключены к соответствующим выходам регистра выделения центра, а вторые - к выходам делителя частоты. Фотодатчики соединены с соответствующими входами регистра выделения центра через схемы «И считывания, вторые входы которых соединены с выходом делителя частоты, и регистр памяти, каждый вход которого подключен к выходу соответствующей схемы «И записи. Кроме того, в конкретном случае регистр выделения центра содержит в каждом разряде схему «И прямого сдвига, схему «И обратного сдвига и триггер, нулевой выход которого через схемы «И прямого и обратного сдвига соединен с нулевыми входами триггеров двух соседних разрядов.
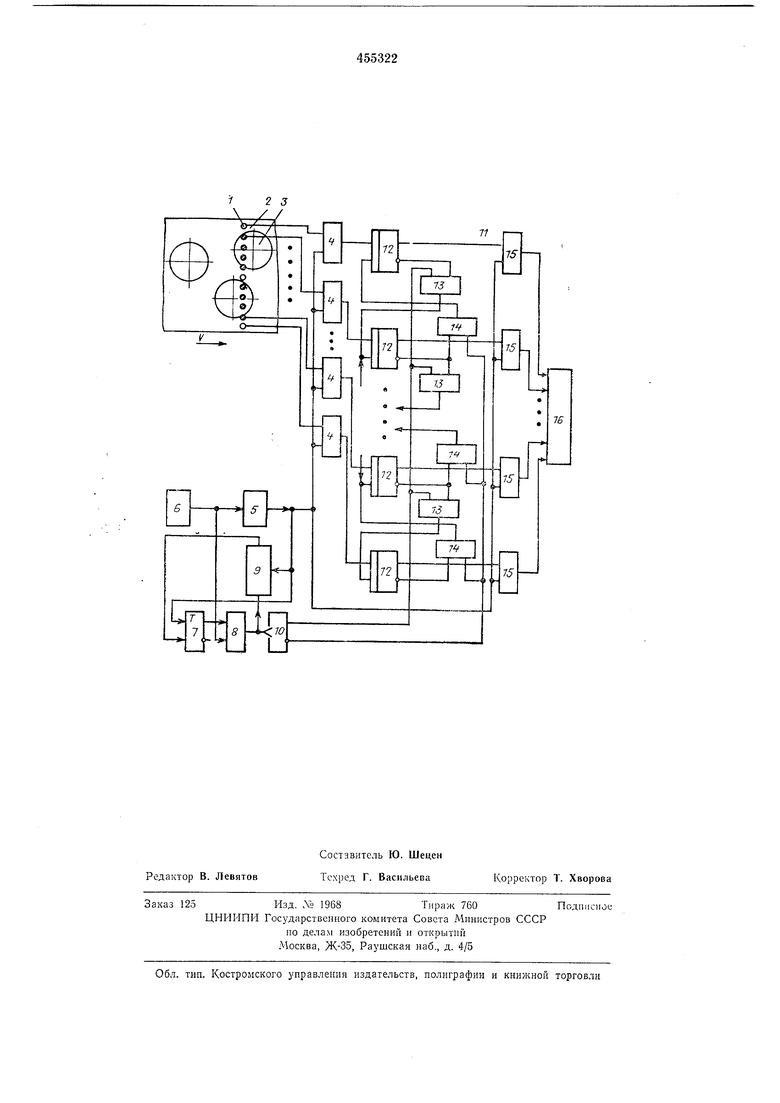
На чертеже изображено устройство оиределеиия центра предметов круглой формы, снимаемых роботом-манипулятором с движущейся ленты конвейера.
Фотодатчики / располагаются над лентой конвейера 2, ио которому двигаются иредметы круглой формы 3. Выходы фотодатчиков / соединены с первыми входами соответствующих конъюнкторов 4 фотодатчиков, вторые входы которых объединены и иодключены к выходу делителя частоты 5. Вход делителя частоты 5 подключен к выходу генератора тактовых импульсов 6 (ГТП). Единичный вход триггера счета 7 подключен к выходу делителя часто/-U
ТЫ о, а единичный выход - к первому входу конъюнктора 8, второй вход которого подключен к выходу ГТИ. Счетный вход счетчика 9 соединен с выходом конъюнктора 8, вход установки нуля - с выходом делителя частоты 5, а выход - с нулевым входом триггера счета 7. Счетный вход триггера сдвига 10 подключен к выходу конъюнктора 8. Регистр // выделения центра с числом разрядов, равным числу фотодатчиков, содержит в каждом разряде триггер 12, единичный вход которого соединен с
выходом соответствующего конъюнктора 4 фотодатчиков. Нулевой выход каждого триггера 12 через конъюнктор прямого сдвига 13 соединен с нулевым входом триггера последующего разряда, а через конъюнктор обратного сдвига 14 - с нулевым входом триггера иредыдущего разряда. Конъюнкторы 13 всех разрядов подключены к единичному выходу триггера сдвига 10, а конъюнкторы 14 --к нулевому выходу триггера сдвига 10. Единичные выходы триггеров 12 регистра 11 подключены к первым входам соответствующих конъюнкторов записи 15, вторые входы которых подключены к выходу делителя частоты 5. Выходы конъюикторов заипси 15 подсоединены к соответствующим входам регистра памяти 16.
Устройство работает следующим образом.
Линейка фотодатчиков / располагается над лептой конвейера перпендикулярно направлению его движения. Число фотодатчиков и расстояние между ними определяются шприной ленты конвейера и требуемой точностью определения ионеречной координаты центра предметов.
Фотодатчики реагируют па наличие предметов под ними. Если под какими-то из фотодатчиков проходит иредмет, на их выходе устанавливается сигнал «1 (на чертеже эти фотодатчики заштрихованы), если иредмет отсутствует- сигнал «О. Опрос состояния фотодатчиков производится с определенной частотой путем подачи нмпульсов опроса с выхода делителя частоты 5 на конъюнкторы 4.
Каждый опрос представляет собой как бы мгновенпое сечение ленты конвейера с иредметами плоскостью, перпендикулярной к поверхностн ленты и проходящей через лииейку фотодатчиков. Там, где эта илоскость иересекает предметы, на выходе фотодатчпков, расположенных над нимн, устанавливается сигнал «1. Там, где предметы отсутствуют, на выходе соответствующих фотодатчиков устанавливается сигиал «О. Так как скорость движения ленты конвейера известна, то можно иодобрать частоту импульсов опроса такой, чтобы за время прохождеиия иредмета под линейкой фотодатчиков иолучить нужное число таких сечений.
Чем больще число опросов, тем точнее определяется продольная координата центра предмета. Импульс опроса открывает коиъюнкторы 4, и информация о состоянии фотодатчиков заносится в регистр //. Одновременно импульс опроса подается на конъюикторы 15 и производится заппсь предыдущего состояипя регистра 11 в регистр памяти 16. Кроме того, импульс опроса обнуляет счетчик 9 и устанавливает триггер счета 7 в единичное состояние, в результате чего открывается конъюнктор S по иервому входу. Импульсы ГТИ через него поступают па счетный вход счетчика 9 и на счетный вход триггера сдвига 10. Частота этих импульсов намного больше частоты импульсов опроса. За время между двумя импульсами опроса производится обработка информации в
регистре 11. Сущность этой обработки заключается в том, что содержимое регистра // сдвигается поочередно в одну и другую сторону на один разряд с одновременной конъюнкцией с предыдущим состоянием регистра. Число сдвигов соответствует диаметру предметов, снимаемых с конвейера.
В результате такой обработки стирается вся информация о предметах, центры которых не находятся в данный момент под фотодатчиками. Если же центр предмета находится под фотодатчиками, то после такой обработки в регистре выделений центра останется «1 в разряде, соответствующем фотодатчнку, находящемуся над центром предмета. Управление сигналом осуществляет триггер сдвига 10. Под действием импульсов, поступающих на его вход, триггер сдвига устанавливается поочередно в единичное и нулевое состояние и открывает поочередно конъюнкторы прямого и обратного сдвига. За счет соответствующего соединения цепей сдвига с триггерами 12 регистра 11 одновременно со сдвигом выполняется конъюнкция.
Число сдвигов задается счетчиком 9, козффициент пересчета которого устанавливается равиым диаметру предметов, снимаемых с конвейера. Как только счетчик 9 заполняется, сигнал с его выхода опрокидывает триггер слета 7, конъюнктор 8 закрывается по первому входу, и прекращается подача импульсов ГТЙ на триггер сдвига 10. Содержимое регистра выделения центра после обработки записывается в регистр памяти 16. Номер разряда регистра памяти, в котором появляется «1, соответствует расстоянию от края ленты конвейера до центра предмета и определяет поперечную координату центра предмета, а момент появления «1 в регистре памяти соответствует моменту ирохождения центра под линейкой фотодатчиков. Зная скорость конвейера, можно легко определить положение предмета на ленте в любой момент времени, что будет соответствовать продольной координате центра предмета. Для снятия предметов с ленты конвейера по сигналам, вырабатываемым в устройстве, достаточно иметь робот-манипулятор с тремя линейными стеиенями свободы (движение вдоль ленты, иоиерек ленты и вверх- вииз) с приводом на щаговых электродвигателях.
Предмет изобретения
Устройство определения центров круглых предметов для систем управления роботом-маиипулятором технологического коивейера, содерл ащее блок ввода данных о местоположении предметов на ленте конвейера, выполиенный в виде фотодатчиков, и блок памяти, отличающееся тем, что, с целью расширения области ирименеиия, увеличения быстродействия и уирощеиия устройства, оно содержит последовательно соединенные генератор тактовых импульсов и делитель частоты, первый триггер, ед1И1ичный вход которого подключен к выходу делителя частоты, управляющую схему «И, первый вход которой подключен к едииичиому выходу иервого триггера, а второй - к выходу геиератора тактовых имиульсов, счетчик, счетный вход которого подключен к выходу управляющей схемы «И, вход установки иуля - к выходу делителя частоты, а выход - к нулевому входу иервого триггера, второй триггер, счетный вход которого подключен к выходу уиравляющей схемы «И, регистр выделения центра, соответствующие входы которого подключены к единичному и нулевому выходам второго триггера, схемы «И считывания н схемы «И заииси, первые входы которых иодключены к соответствующп.м выходам регистра выделения центра, а вторые - к выходам делителя частоты, причем фотодатчнки соединены с соответствующими входами регистра выделения центра через с.хемы «И считывания, вторые входы которых соединены с выходом делителя частоты, н регистр иамяти, каждый вход которого подключен к выходу соответствующей схемы «П заинси.
2. Устройство по п. 1, отличающееся гем, что регистр выделения центра содерл нт в каждом разряде схему «И прямого сдвига, схему «И обратного сдвига и триггер, нулевой выход которого через схемы «И прямого и обратного сдвига соединен с нулевымн входамн триггеров двух соседних разрядов.
123
/
77
15
QL

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
| Устройство для определения центров круглых предметов | 1983 |
|
SU1095135A1 |
| Устройство для управления роботом-окрасчиком | 1984 |
|
SU1254436A2 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| МНОГОКАНАЛЬНЫЙ ИНФРАНИЖОЧАСТОТНЫЙ ЦИФРОВШ КОРРЕЛЯТОР | 1972 |
|
SU433486A1 |
| Устройство для управления роботом-окрасчиком | 1975 |
|
SU491929A1 |
| РЕЛЕ ЧАСТОТЫ ИЛИ ФАЗЫ | 1993 |
|
RU2056693C1 |
| Устройство для подсчета предметов,перемещаемых конвейером | 1981 |
|
SU1030819A1 |
DR:J
15
ш
75
