Изобретение относится к автоматике и вычислительной технике и может найти применение в устройствах управления роботами-манипуляторами, предназначенными для обслуживания технологических конвейеров,
Известны устройства для определения центров круглых предметов, содерЖсццие телекамеру, блок формирования команд и блоки преобразования сигналов ij .Однако данные устройства характеризуются сложностью конструкции.
Наиболее близким к изобретению является устройство, содержащее регистр памяти, п фотодатчиков, выхода которых соединены с первыми входами п первых элементов И, подключенных вто рыми входами к выходу второго элемента И, первый вход которого соединен с выходом генератора тактовых импульсов 2 .
Известное устройство не может определять координаты центра тяжести круглых предметов с отверстиями. Кроме того, оно имеет низкую надежность, так как в случае, если не сработает хотя бы один фотодатчик, то центр предмета не будет определен.
Целью изобретения является расширение функциональных возможностей, упрощение и повышение надежности устройства.
Поставленная цель достигается тем, что в устройство, содержащее регистр памяти, п фотодатчиков, выходы которых соединены с первыми входами п первых элементов И, подключенных вторыми входами к выходу второго элемента И, первый вход которого соединен с выходом генератора тактовых импульсов, введены коммутатор, (п-2) мажоритарных элемента, третий, четвертый и пятые элементы И, последовательно соединенные датчик положения конвейера, шестой элемент И, первый триггер, элемент ИЛИ и счетчик, а также последовательно включенные блок пороговых элементов, второй триггер и седьмой элемент И, выход которого соединен с вторым входом элемента ИЛИ ,а второй , вход - с nepBbiM входом шестого элемента И, подключенного вторым входом к второму входу второго элемента И и выходу блока пороговых элементов, входы которого соединены с выходами соответствующих фотодатчиков, входы третьего элемента И подключены к выходам первых двух первых элементов И, входы четвертого элемента И соединены с выходами ,(п-1) и h первых элементов И, входы каждого мажоритарного элемента подключены к выходам соответствующих первых элементов И, выходы третьего, четвертого элементов И и мажоритарных элементов соединены с соответствующими входами коммутатора,
соответствующие выходы которсэго подключены к входам соответствующих пятых элементов И, соединенных выходами с входами регистра памяти.
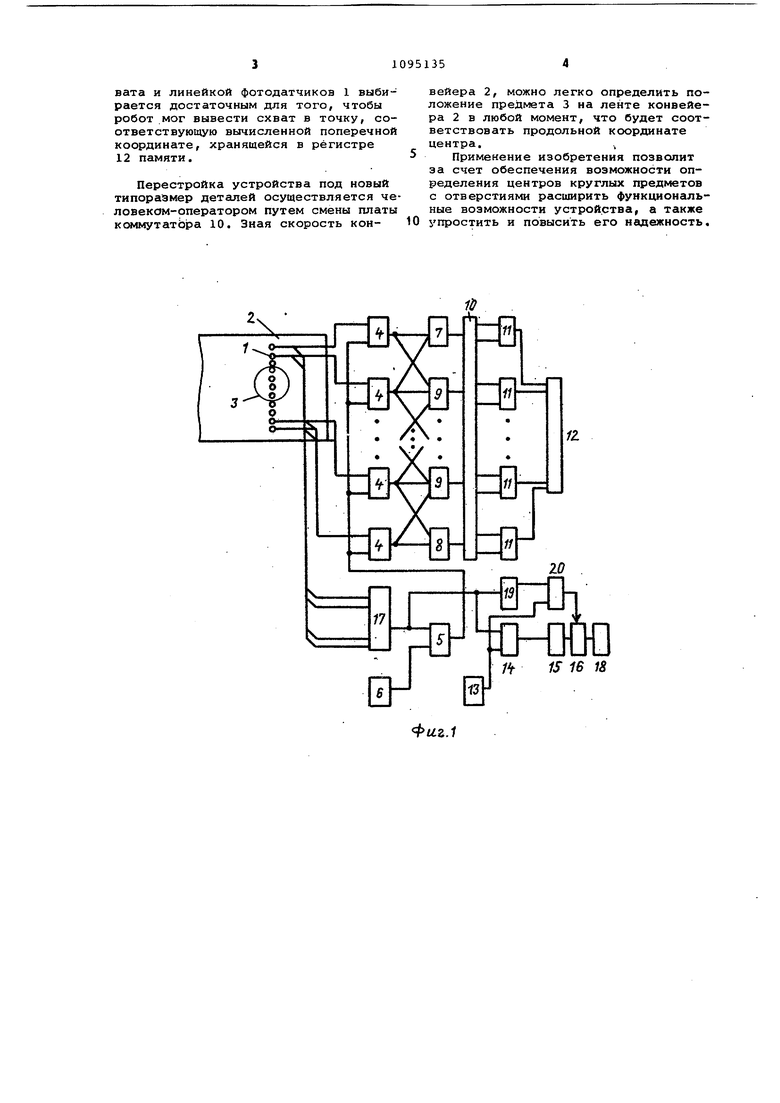
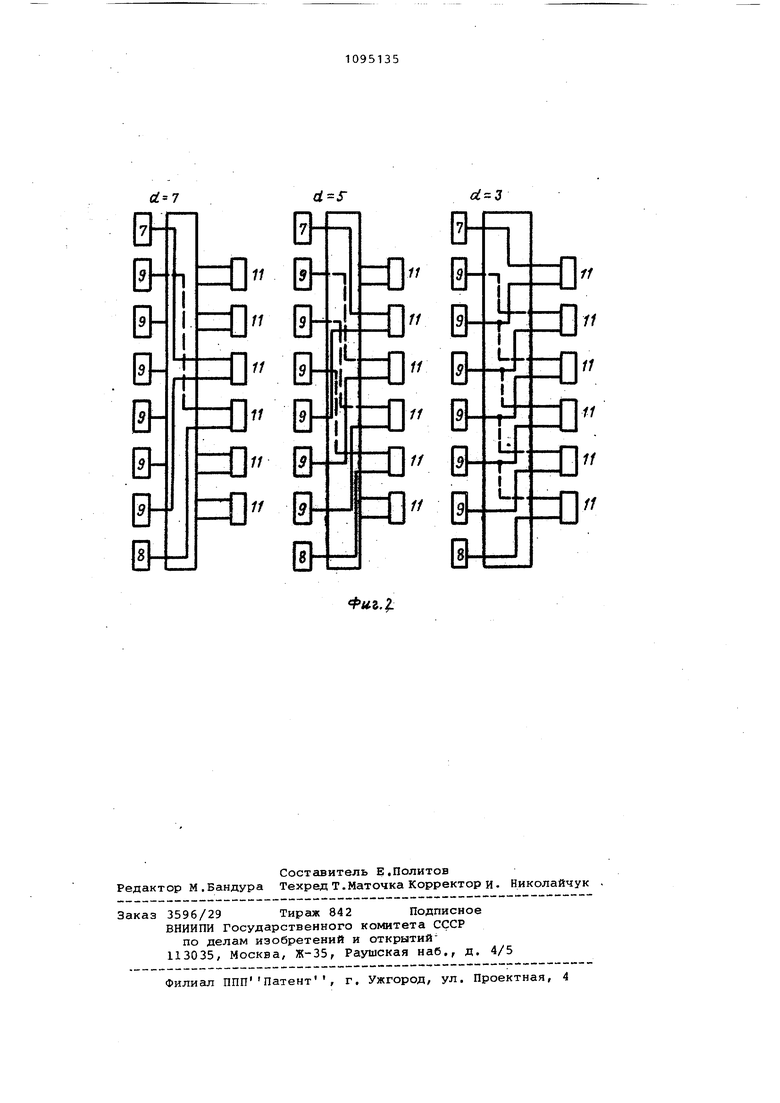
На фиг, 1 представлена функционалная схема устройства; на фиг, 2 - варианты выполнения коммутатора.
Устройство содержит фотодатчики 1 конвейер 2, предмет 3, первые элементы И 4, второй элемент И 5, генерато б тактовых импульсов, третий и четвертый элементы И 7 и 8 соответственно, мажоритарные элементы 9, коммутатор 10, пятые элементы И 11, регистр 12 памяти, датчик 13 положения конвейера, щестой элемент И 14, первый триггер 15, элемент ИЛИ 16, блок 17 пороговых элементов, счетчик 18, вто рой триггер 19, седьмой элемент И 20
На фиг, 2 представлены схемы коммутатора 10 при п 8 для d 3, d 5, d 7, где n - количество фотодатчиков; d - диаметр предмета.
Устройство работает следующим образом.
Как только предмет 3 появляется под одним из фотодатчиков 1, на выходе последнего формируется сигнгш , который проходит на выход блока 17 пороговых элементов. Импульсы опроса с генератора 6 тактовых импульсов через элемент и 5 начингцот поступать на объединенные входы элементов И 4, На выходах элементов И 4, связанных с фотодатчиками 1, под которыми находится предмет 3, появляется 1 , При этом на выходах трехвходовых мажоритарных элементов 9i, реализующих функцию два изтрех,, появляется ., Сигнал i может также появиться на выходах элементов И 7 и 8 записи при подаче на оба входа. Как только центр предмета 3 окажется под фотодатчиками 1, на выходе одного из элементов И 11 появится сигнал , котОЕИй запишется в соответствующий разряд регистра 12 памяти. При появлении на выходе блока 17 пороговых элементов через элемент И 14 сигналы с да-гчика 13 положения ленты конвейера поступают на вход триггера 15, Каждый второй импульс с датчика 13 подается на вход сЧетчика 18, При переходе блока 17 в нулевое состояние по
срабатызаднему фронту сигнала
вает триггер 19 и на вход счетчика 18 через второй элемент И 20 проходят импульсы с датчика. Коэффициент счета счетчика 18 установлен соответственно расстоянию от линейки фотодатчиков 1 до места захвата предмета 3 роботом. По сигналу, появляющемуся с выхода старшего разряда счетчика 18, производится включение схвата робота и предмет 3 захватывается. Расстояние между точкой захвата и линейкой фотодатчиков 1 выбирается достаточным для того, чтобы робот мог вывести охват в точку, соответствующую вычисленной поперечной координате, хранящейся в регистре 12 памяти.
Перестройка устройства под новый типоразмер деталей осуществляется человеком-оператором путем смены платы коммутатЬра 10. Зная скорость конвейера 2, можно легко определить положение предмета 3 на ленте конвейера 2 в любой момент, что будет соответствовать продольной координате центра.
Применение изобретения позволит за счет обеспечения возможности определения центров круглых предметов с отверстиями расширить функциональные возможности устройства, а также
0 упростить и повысить его надежность,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для приема информации | 1988 |
|
SU1552216A1 |
| Устройство для подсчета штучных предметов,перемещаемых конвейером | 1985 |
|
SU1265817A1 |
| Устройство для вывода информации | 1991 |
|
SU1833857A1 |
| Распределенная система для программного управления с мажоритированием | 1990 |
|
SU1727112A1 |
| Трехканальное резервированное устройство для приема и передачи информации | 1990 |
|
SU1758646A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ : ЦЕНТРОВ СРУГЛЫХ ПРЕДМЕТОВ, содержащее регистр памяти, п фотодатчиков, выходы Которых соединены с первымш входами п первых элементов И, подключенных вторыми входами к выходу второго элемента И, первый вход которого соединен с выходом генератора тактовых импульсов, отличающеес я тем, что, с целью расширения функциональных возможностей, упрощения и повышения надежности устройства, оно содержит коммутатор, (п-2) мажоритарных элемента, третий, четвертый и пятые элементы И,, последовательно соединенные датчик положения конвейера, шестой элемент И, первый триггер, элемент ИЛИ и счетчик, а также последовательно включенные блок пороговых элементов, второй триггер и седьмой элемент И, выход которого соединен с вторым входом элемента ИЛИ, а второй вход - с первым.входом шестого элекюнта И, подключенного вторым входом к второму входу второго элемента И и выходу блока пороговых элементов , входы которого соединены с выходг1Ми соответствующих фотодатчиков, входы третьего элемента И подключены к выходам первых двух первых элемен- «g тов И, входы четвертого элемента и сое- (Л динены с выходами (п- 1)и п первых элементов И, входы каждого мажоритарс ного элемента подключены к выходам соответствующих первых элементов И, выходы третьего,четвертого элементов 2 И и мажоритарных элементов соединены с соответствуюйщми входами коммутатора, соответствующие выходы которогЪ подключены к входам соответствующих ;о сд пятых элементов И, соединенных выходё1ми с входами регистра памяти/ : СП
Ч
Фи.г.1
cL-1
d 3
D tO
Li.
/;
t I
11
i-yj
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов | |||
| М., Машиностроение, 1977, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
