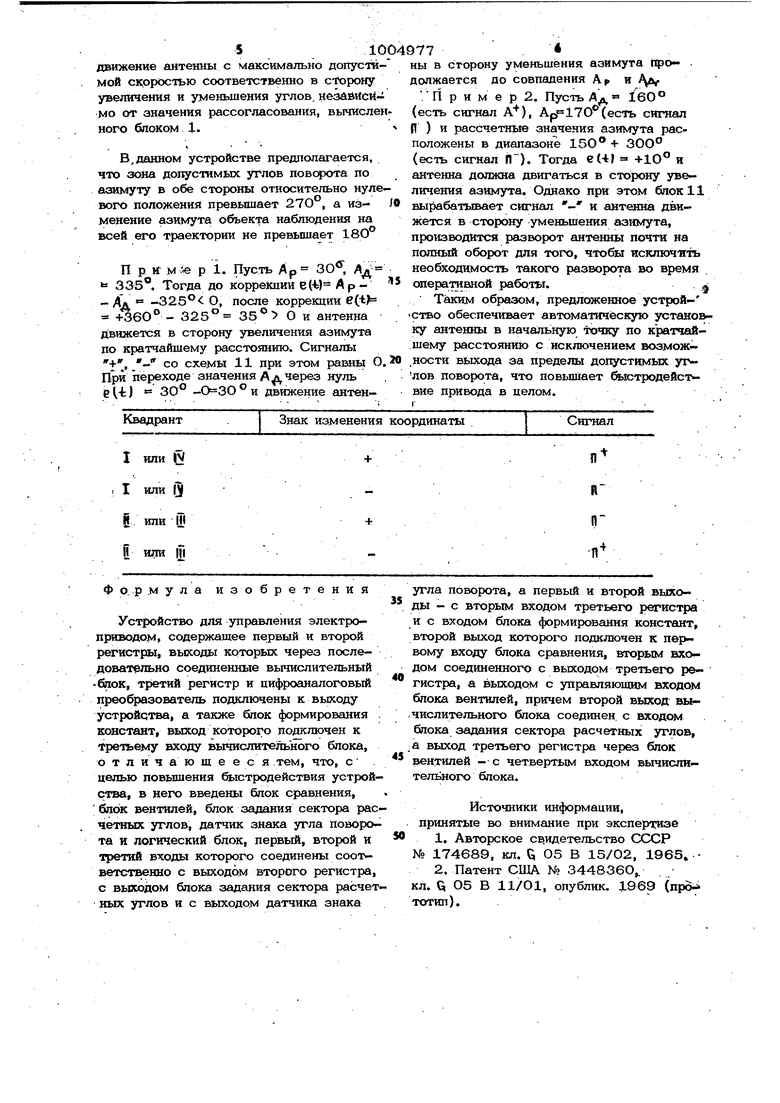
Изобретение относится к автоматическому управлению, .в частности к специализированным управляющим и вычислительным устройствам, и быть ис- пользовано в системах программного управления радиотелескопами, - Известно устройство программного поведения антенны {радиотелескопа, содер жащее цифровое вычислительное устройств выходы угловых рассогласований которого по азимуту и углу моста подсоединены через зопомкяакяпяе регистры и усилители к входам преобразователей кода в напряжение, К цифровому вычислительному устройству подключен выход сельсина коррекции кода азимута, механически свя занного с азимутальной осью и имеющего цену оборота, превьоиаюшую рабочую зону радиотелескопа, за счет чего расщиряется рабочая зона датчика азимута до 720°, устраняется неоднозначность определения положения вала при повороте на угол, больигай 360 , и обеспечивается непрерывность вращения вала при переходе через . Недостатком указанного устройства является невысокое быстродействие, поскольку оно не обеспечивает .согласования расчетного и действительного углов JTO кратчайшему расстоянию и допускает выход за пределы зоны допустимых углов. Наиболее близким к изобретенгао техническим решением является устройство для управления электроприводом, содержащее первый и второй регистры, выходы которых через последовательно соединенные вычислительный блок, третий регистр и цифроаналоговый преобразователь, подключены к вьссоду устройства, а также блок формирования констант, выход которого подключен к третьему входу вычислительного блока С . Основным недостатком данного устройства является невысокое быстродей- CTBvie. Цель изобретения - повьш1ение быстродействия устройства. 310 Указанная цель достигается тем, что в устройство для управления электроприводом сведены блок сравнения, блок вентилей, блок задания сектора расчетных углов, датчик знака угла поворота и логический блок, первый, второй и третий входы которого соединены соответственно с выходом второго регистра, с выходом блока задания сектора расчетных углов и с выходом датчика знака угла поворота, а первый и второй выходы - с вторым входом третьего регистра и с входом блока формирования констант, второй выход которого подключен к первому вхо ду блока сравнения, вторым входом соединенного с выходом третьего регистра. а выходом - с управляющим входом блока вентилей, причем второй выход вьганслительного блока соединен с входом блока задания сектора рассчетных углов, а выход третьего регистра через блок вентилей - с четвертым входом вычислительного блока. На чертеже приведена блок-схема устройства для управления электроприводом. Схема включает вычислительный блок 1, первый, второй и третий регистры 2, 3 и 4, дифроаналоговый преобразователь 5, блок 6 сравнения, блок 7 вентилей, блок 8 формирования конртант, датчик 9 знака угла поворота, блок ; 10 задания сектора расчетных углов .и логический блок 11. Устройство управления работает следующим образом., Вычислительный блок 1 на основании введегавых в него с внешнего устройства . данных вычисляет текущее расчетное значение утла поворота и устанавливает его в регистр 3 расчетного угла. Регистр 2 действительного угла принимает значение угла поворота с датчика, установленного на валу антенны. Разность расчетного и действительного углов поворота вычисляется таюке блоком 1 и записывается в регистр 4 рассогласования. Значение рассогласования e(tj сравнивает ся по модулю блоком 6 сравнения с константой 180°, поступающей с блока 8. Если вьшолняется условие B(ijl 18О° то значение e(i через блок 7 вентилей подается на блок 1. На блок 1 подается таюке с блока 8 константа 36О°, при этом константе присваивается знак, противоположный -знаку рассогласования е (1) Ехпок 1 вьшолняет суммирование значений е (, t;) и константы и результат операции саписывает в регистр 4 рассогласования. В результате значение рассот ласования 774 в регистре 4 оказывается скорректированным и обеспечивает движение по кратчайшему расстоянию. Выдача констант с блока 8 и коррекции рассогласования разрешены сигналом Движение по кра-гчайшему расстоянию с логического блока И. На логический блок 11 поступают: сигналы с двух разрядов регистра 3 расчетного угла для определения номера квадрата, в котором находится расчетный азимут относительно нуля (1 -О + + 900, П -90° -180°, Ж -180° -270°, ly -270 -360°); сигналы А, А с датчика знака угла поворота антенны. Чтобы исключить неопределенность знака угла поворота при нулевом азимуте и применять грубый датчик, знак поворота не выдается в некоторой зоне углов около нуля, например в зоне 1О° Сигнал А означает, что антенна находится в зоне -НО - , Ав зоне -10° -270°; сигналы П и П . Сигнал П означает, что расчетное значение азимута в течение всей работы располагается в квадрантах IS, I , IJ или I , И , или I II J И1 и сложение должно произврдиться в секторе О - +27О°. Сигнал П означает, что значение азимута располагается в (квадрантах }:, , Ш или jj , или V , (П , вли (V , Ж , П и слежение должно производиться в секторе О - -27 О ,Если значения азимута расположены в N , I или 1 , (Г( квадрантах, то сектор может быть как О - , так и О - -27О°. Значения сигналов П, Т1 определяются блоком 10 по квадранту начального расчетной координаты антенны и знаку ее последующего изменения согласно таблице. Логический блок 11 вырабатьтает сигналы К, +, - согласно формуламK / {ivw); (vm), (- Д jy V Д- П( П V HI) , где черта над буквой означает логическую функцию инверсии; знак V - функцию или; сигнал К - Движение по кратчайшему расстоянию - разрешает коррекцию значения, рассогласования, поступают на входы регистра 4 для установки йоответственно максимального положитещ,ного и максимального отрицательного значений рассогласования, при этом происходит движение антею1ы с максимально допустимой скоростью соответственно в с-горону увеличения и уменьшения углов, НбЗйййсймо от значения рассогласования, вычислен ного блоком 1. В,данном устройстве предполагается, что зона допустимых углов поворота по азимуту в обе стороны относительно нуле вого положения превышает 27О , а изменение азимута объекта наблюдения на всей его траектории не превышает 180 П р Н м - р 1. Пусть Ар ЗО, Ад ь ЗЭЗ. Тогда до коррекции eW Ар . Ад -325° О, после коррекции e(t +ЗвО° - 325° 35 Он антенна движе-гся в сторону увеличения азимута по кратчайшему расстоянию. Сигналы +. - со схемы 11 при этом равны О ны в сторону уменьшения азимута tipoдолжается до совпадения Ар и А П р и м е р 2. Пусть Ад« 16О° (есть сигнал А), Ap lTO CecTb сигнал П ) и рассчетные значения азимута расположены в диапазоне 150°+ ЗОО° (есть сигнал П). Тогда eHf +10° и антенна должна двигаться в сторону увеличения азимута. Однако при этом блок 11 вырабатывает сигнал - и антенна движется в сторону уменьшения аз1смута, производится разворот антенны почти на полный оборот для того, чтобы исключить необходимость такого разворота во время оперативной работы.л Таким образом, предложенное устройство обеспечивает автоматическую установку антенны в начальную точку по кратчай;шему расстоянию с исключением возмож- ,ности выхода за пределы допустимых уг-
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Устройство управления угловым положением объекта регулирования | 1983 |
|
SU1117589A1 |
| И. Г. Моисеев,И. И. Погожее, Ю. Н. Семенов и Н. М. Якименко | 1965 |
|
SU174689A1 |
| Устройство для преобразования координат | 1985 |
|
SU1254475A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| Устройство для управления электроприводом | 1977 |
|
SU739468A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| Синусно-косинусный преобразователь | 1986 |
|
SU1388855A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |

Устройство для управления электроприводом содержащее первый и второй регистры, выходы которых через последовательно соединенные вычислительный бпок, третий регистр и цифроаналоговый преобразователь подключены к выходу устройства, а также блок формирования констант, выход которого подключен к третьему входу вычислительного блока, отличающе ее я тем, что, с целью повышения быстродействия устройства, в него введены блок сравнения, ;блок вентилей, блок задания сектора расчетных углов, датчик знака угла поворота и логический блок, первый, второй и третий входы которого соединены соответственно с выходом второго регистра, с выходом блока задания сектора расчетных углов и с выходом датчика знака
ды - с вторым входом третьего регистра и с входом блока формирования констант, второй выход которого подключен к первому входу блока сравнения, вторым входом соединенного с выходом третьего регистра, а выходом с управляющим входом блока вентилей, причем второй выход вы:числительного блока соединен с входом блока задания сектора расчетных углов, ,а выход третьего регистра через блок вентилей - с четвертым входом вычислительного блока.
Источники информации, принятые во внимание при эксперт:язе
№ 174689, кл. 05 В 15/02, 1965.
