Изобретение относится к области автоматики и может быть использовано в системах автоматическогс управления технологическими процессами. - Известно устройство для управления приводом fl, содержащее блок, сглажи вающий скачкообразное изменение входного воздействия по углу до величин ы, обеспечивающей обработку его приводом с рассогласованием, не превышающим наперед заданной постоянной величины. Сбой в работе этого блока устраняется с использованием показания цатчика угла поворота привода. Такое устройство не обеспечивает работу привода в режимах переброски и другик случаях, когда рассогласование должно превышать наперед заданную величину. Устройство также не обеспечива защиту привода от сбоев датчика угла поворота.. Известно устройство 2, реализующее функциональный контроль привода и решающее задачу выявления причины сбоя. Принцип действия устройства основан на анализе рассогласования между расчетным и фактическим положениями привода в текущий и предыдущий моменты опроса положения привода. Наиболее близким по технической сущности к изобретению является устройст- . во, содержащее сумматор, связанные через преобразсдаатель цифра-напряжение с вкодом привода, выходной вал которого соединен с преобразователем валцифра, выход которого подключен к одному из выходов блока вычитания, выход блока задания скорости связан с одним входом блока масштабирования и входом сумматора, триггер и два дополнительных блока вычитания, выходы которых связаны с соответствующими входами триггера, блок выработки ошибок по скорости и по положению, дополнительный сумматор, логический элемент И, выход которого соединен со вторым входом сумматора, соеиненные последовательно логический элеент ЗИ-ИЛИ и регистр, выход которого одключен к первому входу первого доолнительного блока вычитания и к одному з входов дополнительного сумматора, к , ругому входу которого подключен выход лока выработки ошибки по скорости, вы- ход блока выработки ошибки по положеию связан с первым входом второго до- олнительного блока вычитания, соответ- 10 ствующие входы первой группы входов логического элемента ЗИ-ИЛИ соединены с соответствующим выходом триггера, выходом дополнительного сумматора . и шиной тактовых импульсов, с которой 15 соединен один из вход-ов логического элемента ЗИ-ИЛИ и соответствующий вход триггера, соответствующие входы логического элемента ЗИ-ИЛИ связаны с вы-, ходом триггера и одним из входов логи- 20 ческого элемента И, с выходом блока вычитания, вторыми входами логического элемента И и дополнительных блоков вычитания.
В этом- устройстве точность контроля 25 правильности работы привода обратно пропорциональна величине скачкообразного изменения расчетного значения положения привода, вызванного наличием ускорения или заданием переброски привоаа.
В последнем случае, когда скачкообразное изменение расчетного значения может достигать очень больших величин, правильное функционирование устройства 35 невозможно (например, если расчетное значение угла, в предыдущий момент 90 , а в текущий - 300 , то должна .происхойить переброска привода, причем разность равная 27О , что воспринимается устрой- 40 ством как сбой, правильный выход из которого фактически невозможен.
Выключение питания устройства (в том числе непредвиденное) может приводить к «: неконтролируемому перемещению привода, которое не позволяет правильно управлять приводом после включения питания. Всякое отключение контроля привода может привести в случае сбоя в течение этого промежутка времени к неправиль- 50 ному управлению приводом после прекращения сбоя, так К9К прекращение сбоя ложно воспринято устройством как сбой. Цель изобретения состоит в повышеНИИ точности работы привода при наличии случайных сбоев.
Эта цель достигается тем, что в устройство введены третий дополнительный
блок вычитания, дополнительный регистр, логический элемент 2И-2ИЛИ, блок масштабирования, блок включения питания, дополнительный логический элемент И и блок сравнения. Один вход третьего дополнительного блока вычитания подклк)чен к выходу элемента 2И-2ИЛИ, входу дополнительного регистра и к первому входу первого блока вычитания, другой вход - к выходу блока масштабирования, третий вход - к выходу дополнительного регистра, а выход - к первому входу блока сравнения и к одному входу дополнительного элемента И, другой вход которого подключен к выходу блока сравнения, а выход - к третьим входам первого и второго дополнительных блоков вычитания. Второй вход блока сравнения подключен к четвертому входу первого дополнительного блока вычитания и одному выходу блока включения питания, другой выход которого подключен к первому входу элемента 2И-2ИЛИ, второй вход которого соединен с выходом преобразователя вал-цифра. Вход блока масштабирования подключен к выходу блока задания скорости, вход которого соединен с входом блока включения питания и датчиком тактовых импульсов.
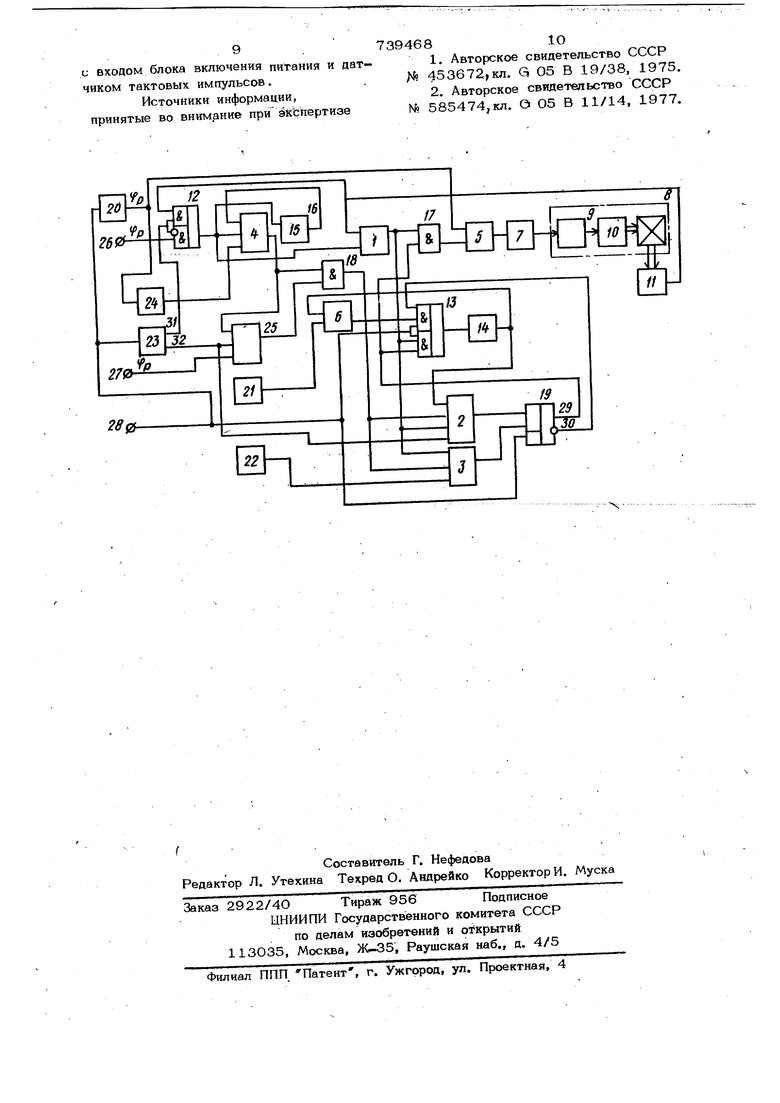
На чертеже представлена структурная схема устройства.
Оно содержит первый блок вычитания 1, первый дополнительный 2 и второй дополнительный 3 и третий 4 дополнительный блоки вычитания, сумматор 5 и дополнительный сумматор 6. Преобразователь цифра-напряжение 7 подключен к приводу 8, который содержит, например, усилитель 9, двигатель 10 и редуктор.
Преобразователь валнаифра 11 соединен с элементом 2И-2ИЛИ 12. Устройство содержит также элемент ЗИ-ИЛИ 13, регистр 14, дополнительный регистр 15 с выходом 16, элементы И 17, 18, триггер 19, .блок задания скорости 20, блок выработки ошибок по скорости 21, блок выработки ошибки по положению 22, блок включения питания 23, блок масштабирования 24 л блок сравнения 25. На вход 26 устройства поступает Чр R cчетный угол поворота прЕйода на вход 27 -fpacg соответствующем масштабе, на вход 28 - тактЬвые импульсйь
Триггер 19 имеет выходы 29 и 30, блок 23 - выходы 31 и 32.
Работает устройство следующим образом. Допустим все источники питания привода включены. При этом, на выходак блока -включения питания 23 устанавливаются сигналы О. К моменту поступления (-го тактового импульса на вход 28 устройство находилось в течение промежутка времени меАду приходом 1 -1 и i импульсов в следующем состо нии: в регистре 15 хранится Ч ; в регистре 14 хранится Д.Ч . ; триггер находился в состоянии 1, при котором на выходе 29 устанавливается сигнал а на выходе 30-сигнал привод В под действием напряжения с выхода преобразователя 7 приводит во вращение преобразователь 11; напряжение на выходе преобразователя 7 пропорциональ но величине .„ где Ч , - расчетный угол поворота привода, поступающий на вход 26 устройства в момент поступления i - 1 тактового импульса ( в дальнейшем тексте такт 1-1рассогласование по углу между и фактическим положением вала кодируемого преобразователем 11 расчетное значение скорост изменения , поступаю. . шее с блока задания скорости 20 в 1-1 такт. По приходе i тактового импульса че рез эл&мент 2И-2ИЛИ 12 проходит код ,поступающий на вход блока вычитания 4 и в регистр 15, на выходе ко торого одновременно формируется хранИЬ -шийся ,поступающий на другой вход вычитания блока 4. На третий вход блока с выхода масштабирования 24 поступает величина КЧр (расчетное значение угла поворота привода за промежуток времени, равный интервалу между тактами, учитываемый блоком масштабирования 24). Таким образом, на выходе блока вычитаний 4 формируется величина рассчитываемого устройством скачкообразйого изменения Чр , вызванного наличием ,%VV:V, W Эта величина сравнивается блоком сравнения 25 с величиной Ц р поступающей на вход 27 устройства , где Q J jjf - наперед заданные постоинн-ые величины определяемые точностью производимых расчетов. 1. Эти условия справедливы в случае, если Cf -О. Выполнение условий выражения (2) приводит к формированию на выходе блока сравнения 25 сигнала 1 и свидетельствует о том.что величина поступившая, на вход устройства, правильна, но скачкообразное, изменение значения нужно учитывать при контроле привода. Пусть в рассматриваемом . вами случае оба условия выражения (2) выполняются, тогда через открытый элемент И 18 значение сУЧр поступает на входы блоков вычитания 2 и 3. Кроме того, на вход этих блоков поступает с выхода блока вычитания 1 рассогласование по углу в 1- момент времени. . Таким образом на входы блокавычитания 3 поступают Ц ,р , также лоп допустимого рассогласования по углу, формируемая блоком выработки ошибки по положению 22 и равная, максимально возможной величине привода в установившемся режиме работы и при . На выходе блока вычитания 3 образуется сигнал 1, свидетельствующий о том, что рассогласование по углу с учетом скачка в расчетном значении угла не превышает допустимой величины, в случае есш. ,-l-fcfvppl|- o. (3) На выходе блока вычитания 2 образуется сигнал , свидетельствующий о том, что рассогласование по углу с учетом скачка в расчетном значении угла, уменьшается, если Pl/-K-1 4hO (4) Выполнение хотя бы одного из выражений (3) и (4) является условием правильности работы привода, не имеющего перерегулирований, что и вьфажается в установке триггера 19 в состояние по сигналу 1 -го тактовог импульса на его синхронизирующем вгсэде. При этом по сигналу 1 на выходе 9 триггера 19, значение проходит ерез элемент И 17 и через эламент И-ИЛИ 13 на регистр 14, где оно храится до следующего такта работы устройтва. На выкоде сумматора 5 образуется код, равный сумме Чр-i который преобразуется преобразователем 7 в пропорциональное напряжение, управляющее приводом в течение промежутка времени между -1 -ным и ( i +1)-ым тактовыми импульсами и т.д. 2.В том случае, если в выражении {2)/cf4n Ti что происходит при небольшом скачкообразном изменении f р за один такт, соизмеримом с единицей млад шего разряда, на выходе блока сравнения 25 устанавливается i такт сигнала О закрывающий элемент 18. Это приводит к тому, что в выражениях (3) и (4) (УЦ)р 0, в остальном устройстве работает аналогично, случаю рассмотренному в п. 1. , 3.Рассмотрим случай, когда в момент поступления тактового импульса происходит сбой в работе преобразователя вал-41ифра 11, который, длится до импульса К. В этом случае условия ни одного из выражений (3) и (4) не выполняются, вследствие того, что рассогласование i увеличилось и превышает допустимое Л.доп Триггер 19 при этом устанавливается в О, в результате чег элемент И 17 оказывается закрытым и на привод поступает только управляющее напряжение, пропорциональное Цр. За счет невдеальности реализации приводом этой скорости, а также наличия происходит увеличение фактического рассогласования, расчетное значение которого за время, равное одному тактуДч одо формируется Hia выходе блока еыреюотки ошибок по скорости 21. Эта величина складывается в сумматоре 6 с содержимым регистра 14, и результат поступает в состояние О триггера 19 через элемент ЗИ-ИЛИ 13 на кранение в регистре 14. Выражение (3) в течение времени наличия сбоя приобретает вид 1А.Ч S и.1-li M- vdfn -j j I ( Таким образом, в течение времени сбо происходит медленное нарастание факти- ческой ошибки по положен1по, после прек- ращения сбоя в момент поступления такт вого; импульса К условие (3) выполняет- ся, триггер 19 устанавливается в состои ние 1. В результате u,f| поступает в регистр 14, а на привод проходит рассог ласование по положению, которое им отр ба ьтается. 7 68 4. В случае кратковременного сбоя значений fp на входе 26 происходит скачкообразное изменение Чр , при котором условие выражения (2) не выполняется, код (JVp проходит через элемент И 18. В результате не выполняется ни одно из условий выражений (3) и (4). . В этом случае работа устройства в течение времени сбоя и в момент окончания его аналогично описанной в п. 3. Таким образом, устройство обеспечивает защиту привода от сбоев, выявленных с высокой степенью точности. При выключении питания устройство контролирует правильность работы преобразователя вал-чхифра до момента остановки привода. После включения питания устройство выявляет случаи неправильного показания преобразователя вал-цифра и обеспечивает правильное функционирование привода после прекращения сбоя этого преобразователя. Формула изобретения Устройство для управления электроприводом по авт. св. № 489074, отличающееся тем, что, с целью повышения точности работы устройства, оно содержит третий дополнительный блок вычитания, дополнительный регистр, логический элемент 2И-2ИЛИ, блок масштабирования, блок .включения питания, дополнительный логический элемент И и блок сравнения, причём один вход третьего дополнительного блока вычитания подключен к выходу логического элемента 2И-2ИЛИ, входу дополнительного регистра и к первому входу первого блока вычитания, другой вход - к выходу блока масштабирования, третий вход - к выходу дополнительного регистра, а выход к первому входу блока сравнения и первому входу дополнительного логического элемента И, второй вход которого подключен к выходу блока сравнения, а третьим входам первого и второго дополнительных блоков вычитания, второй вход блока сравнения подключен к четвертому вхиду первого дополнительно- го блока вычитания и одному выходу бло- ка включейия питания, другой выход которого подключен к первому входу логического, элемента 2И-2ИЛИ, второй вход которого соединен с выходом преобразователя вал-ч1ифра, вход блока масштабирования подклкэчен к выходу блока задания скорости, вход которого соединен
9739468lO
и входом блока включения питания и дат-1. Авторское свидетельство СССР
чином тактовых импульсов.. 433672 кл. Q 05 В 19/38, 1975.
Источники информации,2. Авторское свидетельство СССР
принятые во внимание при экспертизеМ 585474,кл. О О5 В 11/14, 1977.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для функционального контроля электропривода | 1987 |
|
SU1481717A1 |
| Устройство для управления приводом | 1973 |
|
SU489074A1 |
| Устройство для функционального контроля цифрового привода | 1975 |
|
SU670925A1 |
| Преобразователь синусно-косинусных сигналов в последовательность импульсов | 1988 |
|
SU1737731A1 |
| Цифровой измеритель центра тяжести видеосигналов | 1990 |
|
SU1723559A1 |
| Цифровой преобразователь координат | 1985 |
|
SU1257638A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Генератор псевдослучайных последовательностей | 1984 |
|
SU1228236A1 |
| Система управления телескопом | 1984 |
|
SU1238026A1 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ДИСКРЕТНОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 1991 |
|
RU2015550C1 |
