Изобретение относится к станкостроению,
По основному авт. св. № 699746 известна механическая рука, содержащая основание, п шарнирно соединенных звеньев, у которых m последовательных шарниров имеют горизонтальные оси, причем , индивидуальные приводы каждого звена и механизм компенсации кинематического взаимовлияния перемещения звеньев, а также снабжена рядом сумматоров-дифференциалов и синусных механизмов с упругими элементами, установленными на выходах синусных механизмов, причем вход каждого из сумматоров кинематически связан с индивидуальным приводом и предыдущим сумматором, выход - с последующим сумматором и со входом синусного механизма, а вход первого сумматора закреплен на основании 1.
Однако в известной механической руке движение осуществляется от индивидуальных двигателей для возможности выполнения так называемых стереотипных движений, между кинематическими цепями привода двух и более звеньев включается дополнительная кинематическая связь, а движение этой группы звеньев осуществляется по заданному закону с приводом только от одного индивидуального двигателя. В этом случае механическая рука должна снабжаться дополнительной кинематической цепью с двумя программно управляемыми муфтами, одна из которых устанавливается в этой цепи, а другая - между индивидуальным двигателем и приводной кинематической цепью одного из звеньев, что усложняет конструкцию и увеличивает габариты руки.
Цель изобретения - упрощение конструкции и уменьщение габаритов.
Цель достигается тем, что механическая рука снабжена самотормозящими редукторами и муфтами, причем муфты установлены на выходах этих редукторов между индивидуальными двигателями и приводной кинематической цепью звеньев и связаны с этой кинематической цепью через дополнительно введенный промежуточный вал.
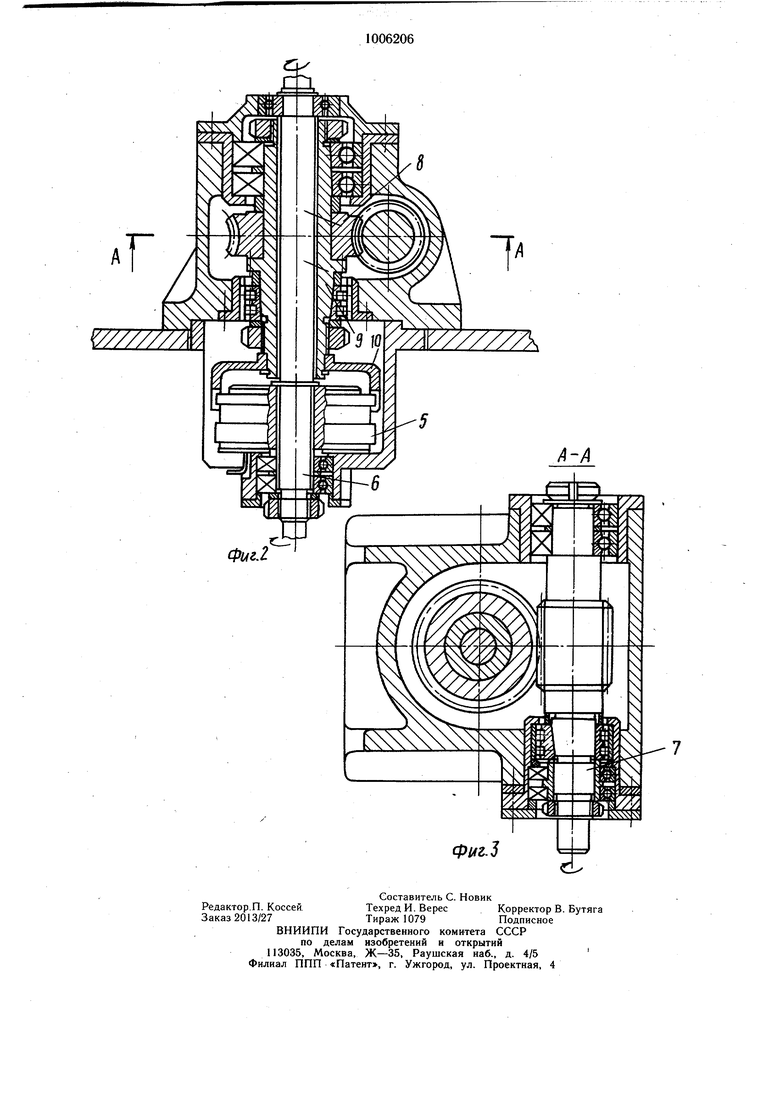
На фиг. 1 показана кинематическая схема механической руки; на фиг. 2 - редуктор, продольный разрез; на фиг. 3 - разрез А-А на фиг. 2.
Механическая рука снабжена самотормозящими (червячными) редукторами 1 и муфтами 2 (фиг. 1), обеспечивающими подключение редукторов с двигателями 3 к кинематической цепи. Для остальных степеней свободы двигатели с редукторами условно показаны кружочками. Передача 4 связывает две степени свободы руки и имеет муфту 5, связанную с промежуточным валом 6. Самотормозящий (червячный) редуктор содержит вал 7, на котором жестко закреплен червяк, получающий вращение от индивидуального электродвигателя 3. Червячное колесо 8 посажено на втулку 9, которая через поводок 10 связана с ведущими дисками электромагнитной муфты 5. Ведомые диски муфты 5 связаны с независимым промежуточным валом 6, который связан непосредственно со звеном.
Устройство работает следующим образом.
Для выполнения стереотипных движений в конструкцию механической руки включена кинематическая связь, например передача 4, связывающая две степени свободы, и подключаемая муфтой 5 (фиг. 1). Если муфта 5 отключена (стереотипное движение отсутствует) муфты 2 включены и оба двигателя 3 работают независимо.
Если требуется выполнить стереотипное движение (муфта 5 включает связь), то один из двигателей вместе с самотормозящимся редуктором должен быть отключен от цепи привода, иначе второй двигатель, который должен осуществлять движение обеими звеньями не сможет провернуть кинематическую цепь. Для отключения двигателя используется соответствующая муфта 2, а привод к данному звену осуществляется от двигателя другого звена через передачу 4 и промежуточный вал 6.
В случае, если для обеспечения необходимых стереотипных движений требуется осуществить привод от двигателя другого звена, электромагнитная муфта отключается, при этом отключается и червячная пара, а через независимый промежуточный вал 6 осуществляется кинематическая связь.
Эффект достигается за счет сокращения трудоемких операций. При этом упрощается конструкция механической руки и уменьщаются ее габариты.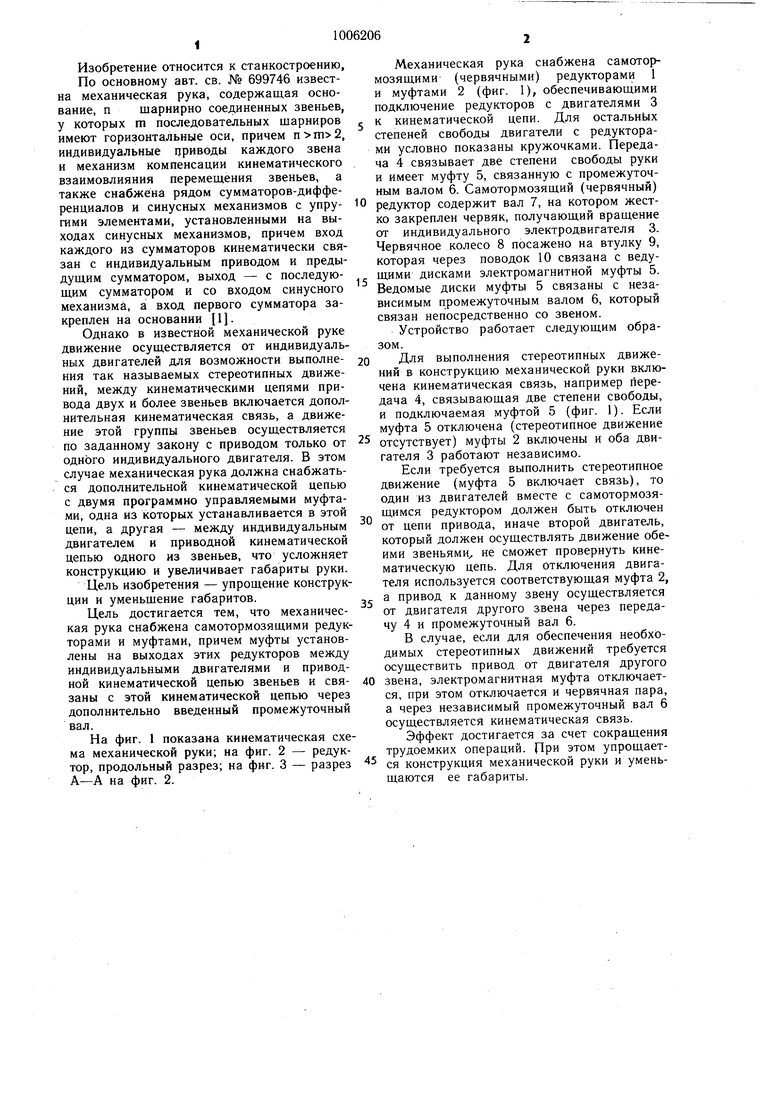
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU708623A1 |
| Автоматический манипулятор с программным управлением | 1980 |
|
SU906684A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Устройство для перемещения каретки вырубочного пресса | 1972 |
|
SU436665A1 |
МЕХАНИЧЕСКАЯ РУКА по авт. св. № 699746, отличающаяся тем, что, с с целью упрощения конструкции и уменьшения габаритов, она снабжена самотормозящими редукторами и муфтами, причем муфты установлены на выходах этих редукторов между индивидуальными двигателями и приводной кинематической цепью звеньев и связаны с этой кинематической цепью через дополнительно введенный промежуточный вал. S 05 to о О5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
