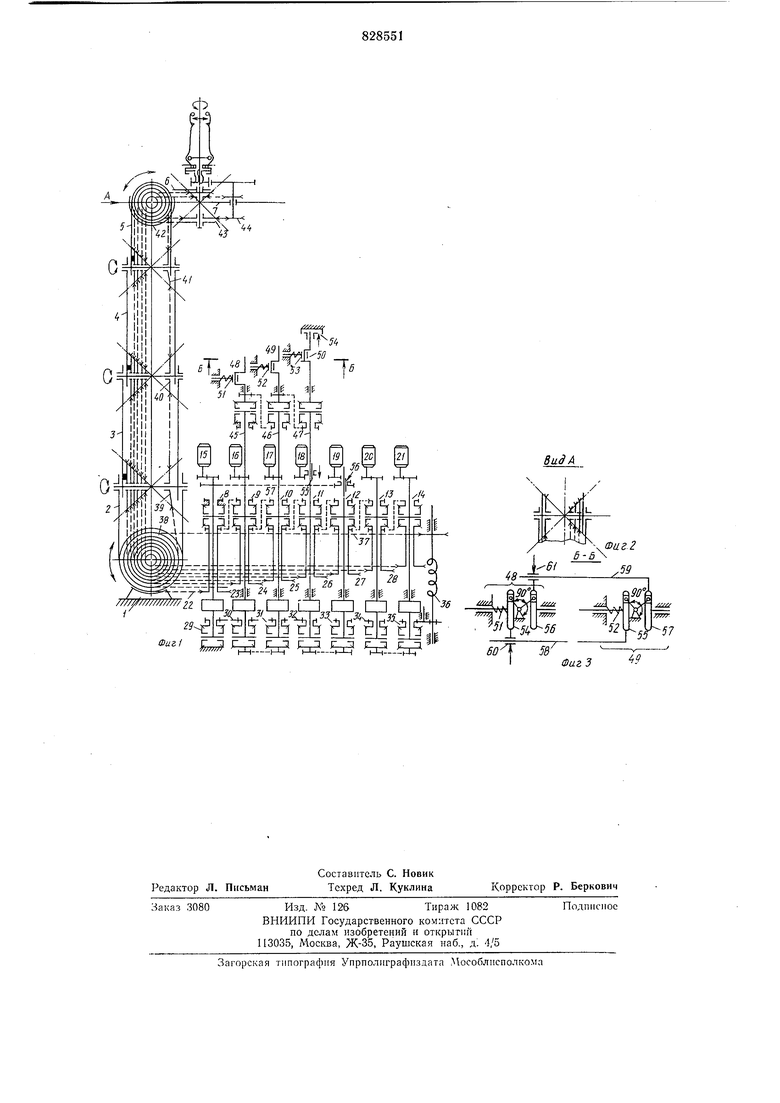
Механическая рука образована последовательно установленными иа осиовании 1 и шарнирно соединенными звеньями 2-7, причем звенья 3-5 установлены на шарнирах с параллельными горизонтальными осями и имеют одинаковую длину. Звено 2 посредством шарнира крепится- на осиоваиии 1. Там же установлены компенсируюш,ий механизм, образованный рядом дифференциалов 8-14, и иидивидуальиые двигатели 15-21, связаниые со звеиьями руки кинематическими цеиями, выполиенными, например, иа тросовых передачах 22-28. Натяжение всей системы иередач руки осуществляется механизмом, содержащим ряд сумматоров-диффереициалов 29-35 с согласующими редукторами (.если это необходимо), тореной 36 и иатяжиую тросовую ветвь 37, уложенную иа ролики 38-44. Уравновешивание веса звеньев 3-5 производится устройством, образованным дифференциалами 45-47, выходные валы которых связаны с синусными мехаиизмами 48-50, осиаш еиными разгружающими упругими элементами - пружинами 51-53.
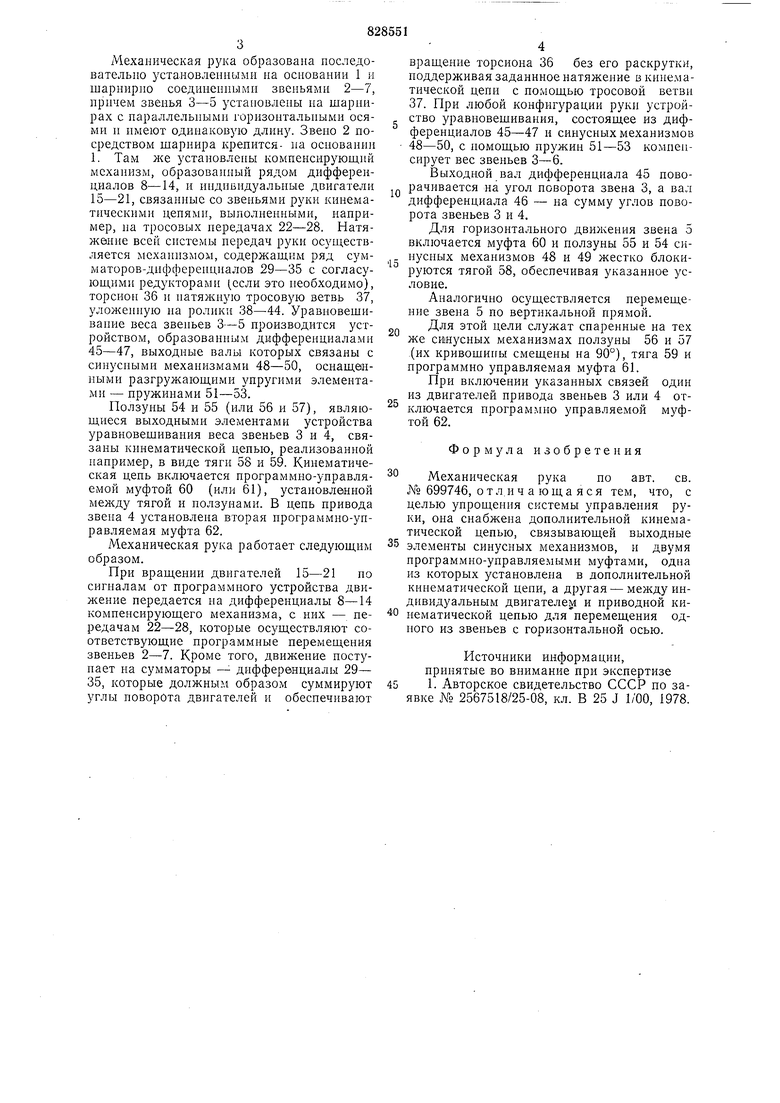
Ползуиы 54 и 55 (или 56 и 57), являющиеся выходными элемеитами устройства уравновешиваиия веса звеньев 3 и 4, связаны кинематической цепью, реализованной например, в виде тяги 58 и 59. Кинематическая цепь включается ирограммно-управляемой муфтой 60 (или 61), установлениой между тягой и ползунами. В цепь привода звена 4 установлена вторая программно-управляемая муфта 62.
Механическая рука работает следующим образом.
При вращении двигателей 15-21 по сигналам от программного устройства движение передается иа дифференциалы 8-14 компенсирующего механизма, с них - передачам 22-28, которые осуществляют соответствующие программные перемещения звеньев 2-7. Кроме того, движение иостунает на сумматоры - дифференциалы 29- 35, которые должным образом суммируют углы поворота двигателей и обеспечивают
вращение торсиона 36 без его раскрутки, поддерживая заданиное иатяжеиие в кинематической цепи с помощью тросовой ветви 37. При любой конфигурации руки устройство уравновещивания, состоящее из дифференциалов 45-47 и синусных мехаиизмов 48-50, с иомощью пружин 51-53 комненсирует вес звеньев 3-6.
Выходиой вал дифференциала 45 поворачивается иа угол иоворота звена 3, а вал диффереициала 46 - на сумму углов поворота звеньев 3 и 4.
Для горизоитальиого движения звена 5 включается муфта 60 и ползуны 55 и 54 синусных мехаиизмов 48 и 49 жестко блокируются тягой 58, обеспечивая указанное условие.
Аналогично осуществляется иеремещение звеиа 5 по вертикальной прямой.
Для этой цели служат спаренные на тех же сииусиых механизмах ползуны 56 и 57 (их кривошиггы смещены на 90°), тяга 59 и программно управляемая муфта 61.
При включении указанных связей один из двигателей иривода звеньев 3 или 4 отключается программио управляемой муфтой 62.
Формула изобретеиия
Механическая рука по авт. св. Л 699746, отличающаяся тем, что, с целью уирощения системы управления руки, оиа снабжена дополнительной кинематической цепью, связывающей выходные элементы сииусных механизмов, и двумя ирограммио-уиравляемыми муфтами, одна из которых установлена в доиолнительной кинематической цепи, а другая - между индивидуальным двигателем и приводной кинематической цепью для перемещения одного из звеньев с горизоитальиой осью.
Источиики информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2567518/25-08, кл. В 25 J 1/00, 1978. v////////// ±.«Oz.O i Фиг, , фиг2 I 6- -,g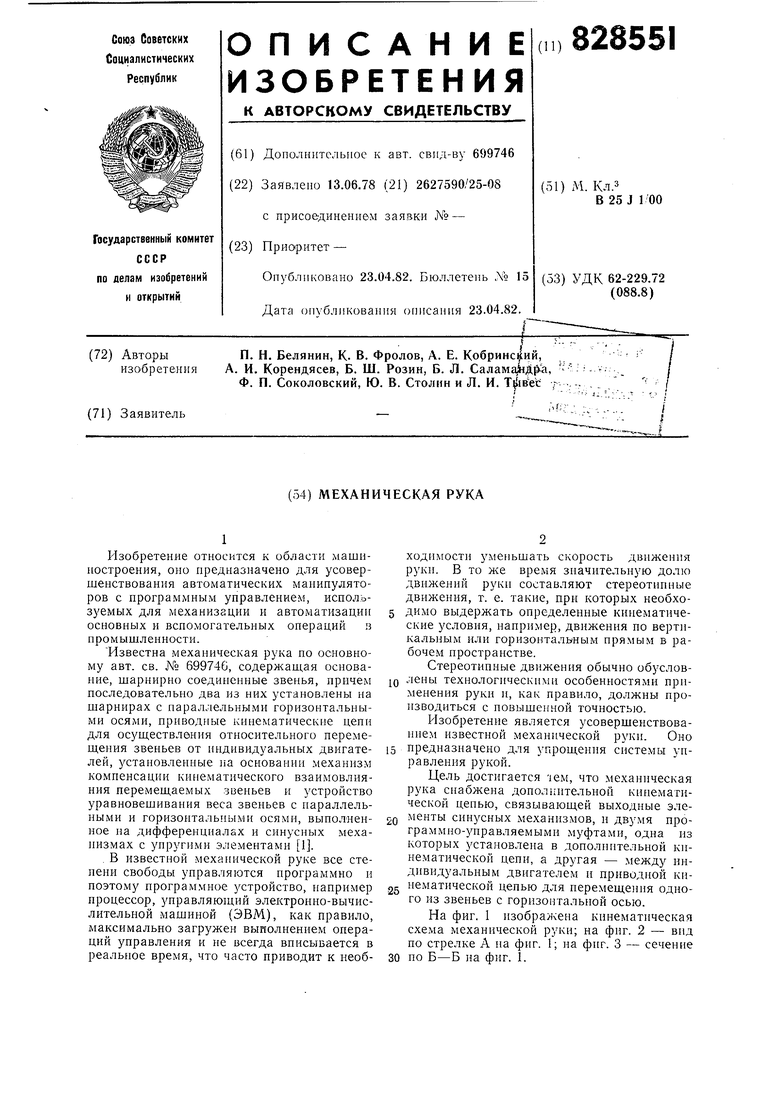
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1978 |
|
SU726762A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |