1
Изобретение отиосится к области машиностроения для легкой промышленности и может найти применение в вырубочных прессах траверсного типа с перемешающейся кареткой.
В известных прессах-автоматах, предназначенных для вырубания деталей изделий легкой промышленности, сигнал управления, поступаюш:ий от програ.ммоносителя, усиливается с помощью гидравлических, пневматических или электрических усилителей .мощности и реализуется в виде перемещений каретки, приводимой в движение, как правило, с помощью ходового винта.
При работе в старт-стопных и реверсных режимах, в известных нрессах возникают динамические ошибки рассогласования, что приводит к увеличению выпуска недоброкачественной продукпии, системы управления таких прессов в большинстве случаев не могут быть построены по простой разомкнутой схеме я снабжаются дополнительными цепями обратной связи. Это усложняет конструкцию пресса и, следовательно, увеличивает его стоимость.
Указанные недостатки могут быть устранены путем введения в конструкцию узла привода каретки устройства, обеснечивающего кинематическую связь между элементами системы управления пресса.
Предлагаемое устройство представляет собой виптовой сумматор, выполненный в виде .ходового винта и гайки, соединенной с помощью вращающихся направляющих и червячпой передачи с приводным валом. Ходорой винт сумматора связан посредством самотормозящейся передачи (червячной) с выходпым звеном шарнирно-стержневого импульсного усилителя мощности, состоящего из
четырех семизвенных .механизмов с двумя ведущими звеньями, одно из которых соединено с силовы.м двигателем, а другое - с источником сигналов управления. При этом структура усилителя позволяет получать значительную
выходную мощность при расходовании небольшой мощности на управление, т. к. параметры и количество семизвенных механизмов выбраны из условий обеспечения минимального значепия среднеинтегрального мо.мента,
необходимого на перемещение управляющего звена в диапазоне, соответствующем пормаль 1ой работе пресса.
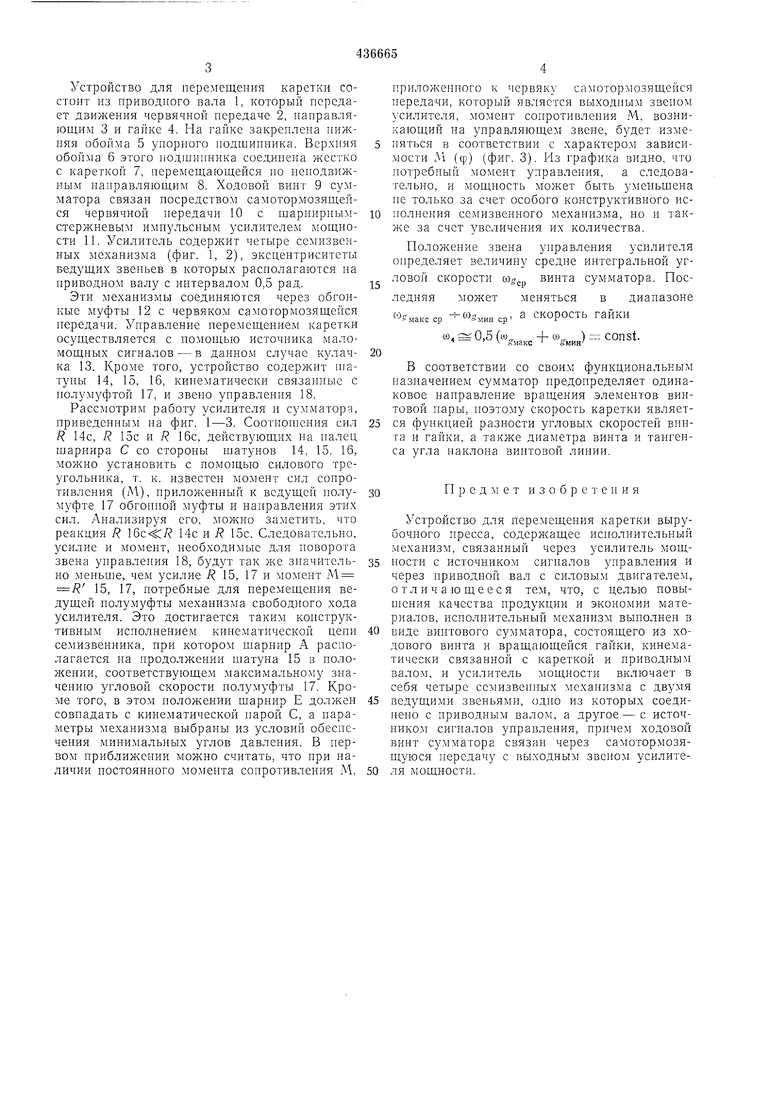
На фиг. 1 приведена структурная схема устройства для перемещения каретки; па
фиг. 2 - плоская схема семизвенного Aiexaнизма; на фиг. 3 - графики, иллюстрирующие
силовые и кинематические соотношения в
шарнирно-стержневом импульсном усилителе
мощности.
Устройство для перемещения каретки состоит из приводиого вала 1, который передает движения червячной передаче 2, направляющим 3 и гайке 4. На гайке закреплена нижияя обойма 5 унорного подшипника. Верхняя 6 этого подшипника соединена жестко с кареткой 7, перемещающейся по неподвижным направляющим 8. Ходовой винт 9 сумматора связан посредством самотормозящейся червячной передачи 10 с шарнирнымстержневым импульсным усилителем мощности 11. Усилитель содержит четыре семизвенных механизма (фиг. 1, 2), эксцентриситеты ведущих звеньев в которых располагаются на привод,ном валу с интервалом 0,5 рад.
Эти механизмы соединяются через обгонные муфты 12 с червяком самотормозящейся передачи.- Управление перемещением каретки осуществляется с помощью источпика маломощных сигналов - в данном случае кулачка 13. Кроме того, устройство содержит niaтуны 14, 15, 16, кинематически связанные с полумуфтой 17, и звено управления 18.
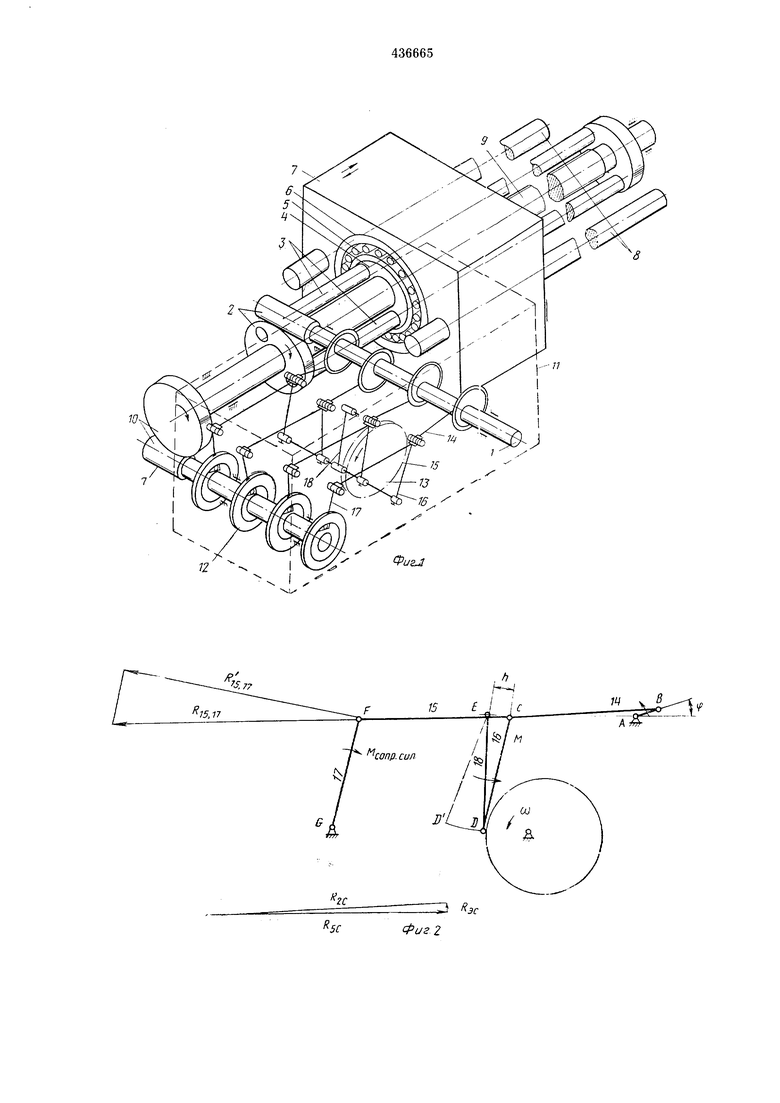
Рассмотрим работу усилителя и сумматора, приведенным па фиг. 1-3. Соотпогпения сил R 14с, R 15с и R 16с, действующих на палец шарнира С со стороны шатунов 14, 15, 16, можно установить с помощью силового треугольника, т. к. известен момент сил сонротивлепия (М), нриложенный к ведущей полумуфте 17 обгоппой муфты и направления этих сил. Анализируя его, можно заметить, что реакция R 14с и R 15с. Следовательно, усилие и момент, необходимые для новорота звена управления 18, будут так же зпачительно меньп1е, чем усилие R 15, 17 и момент М R 15, 17, потребные для перемещения ведущей полумуфты механизма свободного хода усилителя. Это достигается таким конструктивным исполнением кинематической цепи семизвенника, при котором шарнир А располагается на продолжении шатуна 15 в положении, соответствующем максимальному значепию угловой скорости полумуфты 17. Кроме того, в этом положении шарнир Е должен совпадать с кинематической парой С, а параметры механизма выбраны из условий обеспечения минимальных углов давления. В первом приближении можно считать, что нри наличии постоянного момента сопротивления М,
приложенного к червяку самотормозящейся передачи, который является выходным звеном усилителя, момент сопротивления М, возникающий на управляющем звене, будет изменяться в соответствии с характером зависимости М (ф) (фиг. 3). Из графика видно, что потребный момент управления, а следовательно, и мощность может быть уменьшена не только за счет особого конструктивного исполнения семизвенного механизма, но и также за счет увеличения их количества.
Положение звена управления усилителя определяет величину средне интегральной угловой скорости wg винта сумматора. Последняя может меняться в диапазоне
максср - Ямин ср. СКОрОСТЬ ГаЙКИ
to. : 0,5 ((0„ -4- CD,, ) ;- const. макс сГмин
В соответствии со своим функциональным назначением сумматор предопределяет одинаковое нанравление вращения элементов винтовой пары, поэтому скорость каретки является функцией разности угловых скоростей винта и гайки, а также диаметра винта и тангенса утла наклона винтовой лииии.
П р е д М е т и 3 о б р е т е н и я
Устройство для перемещения каретки вырубочного пресса, содержащее исполнительный .механизм, связанный через усилитель мощности с источником сигналов управления и через приводной вал с силовым двигателем, отличающееся тем, что, с целью повышения качества продукции и экономии материалов, исполнительный механизм выполнен в
виде винтового сумматора, состоящего из ходового винта и вращающейся гайки, кинематически евязаиной с кареткой и приводным валом, и усилитель мощности включает в себя четыре семизвепных механизма с двумя
ведупдами звеньями, одно из которых соединено с прнводным валом, а другое-с источпиком сигналов управления, приче.м ходовой винт сумматора связан через самотормозящуюся передачу с вы.ходным звеном уснлителя мощиоетн.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический усилитель мощности | 1976 |
|
SU771390A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ СШИВАЕМЫХ ДЕТАЛЕЙ В ШВЕЙНЫХ ПОЛУАВТОМАТАХ | 1972 |
|
SU335312A1 |
| Устройство для подгонки величиныСОпРОТиВлЕНия РЕзиСТОРОВ | 1979 |
|
SU828223A1 |
| Устройство для завинчивания шурупов | 1986 |
|
SU1404233A1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| Устройство для дискретного перемещения обрабатываемых деталей | 1972 |
|
SU452639A1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1066925A1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1969 |
|
SU244105A1 |
| СПОСОБ ПОДАЧИ КАРЕТКИ МЕТАЛЛОРЕЖУЩЕГО СТАНКА С ХОДОВЫМ ВИНТОМ И ХОДОВЫМ ВАЛОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1989 |
|
SU1826316A1 |
Л Змокс.
/
. ср.
dMUHfp
0,SI
0:757Г
0,25jr
/
А
1,75/Г
ISTT
ZTTif
0,57Г
1,5ГГ
2Jt
0.757/
0,257Г
Г,757Г
V
М
