(54) МЕХАНИЧЕСКАЯ РУКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
1
Изобретение относится к маишностроению и может быть использовано в конструкциях манипуляторов для механизации и автоматизации основных и вспомогательных операций в промышленности.
Ижестна механическая рука, содержащая основание, п шарнирно соединенных звеньев, у которых m последовательных шарниров имеют горизонтальные оси, причем п m 2, индивидуальные приводы каждого звена и механизм компенсаш и кинематического взаимовлияния первмешений звеньев 1.
Эта механическая рука обладает хорошими функциональными возможностями, однако, учиплля необходимость преодоления статических нагрузок (веса звеньев), приходится завышать установленную мошность двигателей, особенно даигателей тех звеньев, оси поворотов которых относительно предыдущих сохраняют горизонтальное положение при всех конфигурациях руки.
Цель изобретения - уменьшение мощности приводов за счет уравновешивания веса звеньев.
Для этого предлагаемая механическая рука содержит ряд сумматоров-дифференциалов и ошусных механизмов. На выходах синусных механизмов установлены упругие элементы, а вход каждого из сумматоров кинематически связан с индивидуальным приводом и предыдущим сумматором, выход - с последуюшим сумматором и с входом синусного механизма, а вход первого сумматора закреплен на основании.
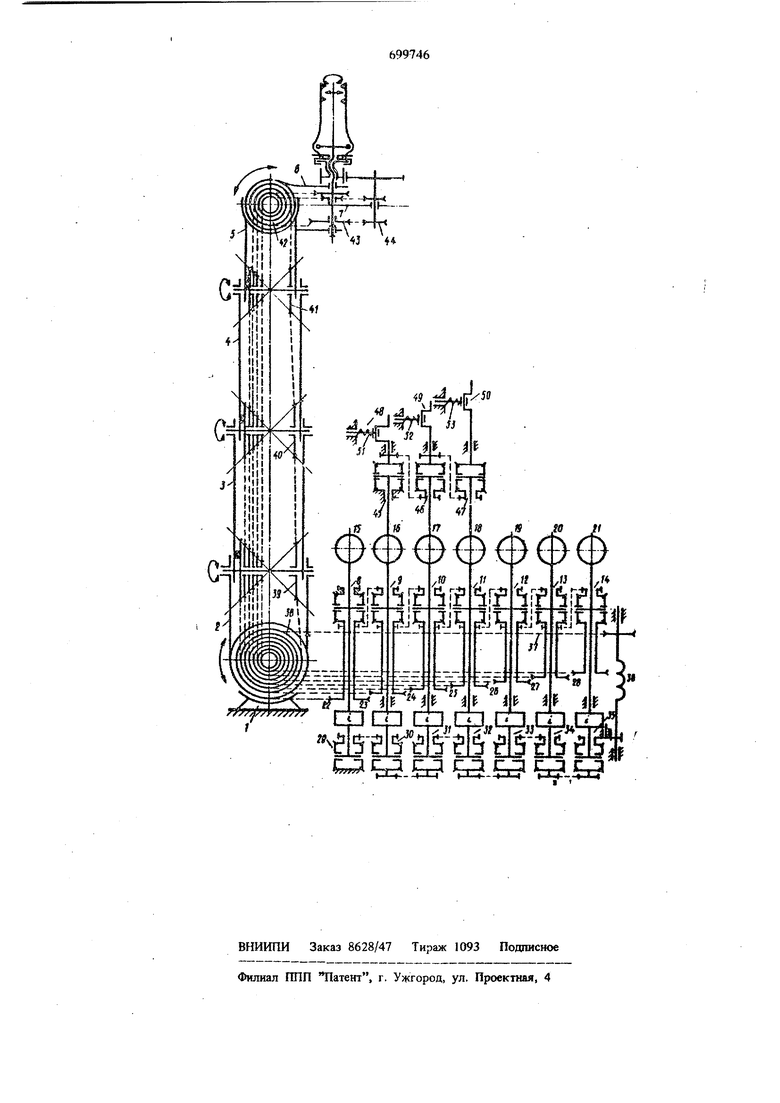
На чертеже дан вариант кинематической схемы описьгеаемой руки.
Механическая рука образована последовательно расположенными на основании 1 н соединенными звеньями 2-7. Звено 2 посредством шарнира с вертикальной осью крешгтся на -основании I. Шарниры, соединяяшше звенья 2 и 3 3 и 4, 4 и 5, имеют параллельные оси, сохраняющие горизонтальное положение при любых конфигурациях руки.
Дифференциалы 8-14 механизма компенсации кинематического взаимовлияния перемещений звеньев и индивидуальные приводы 5-21 посредством кинематических тросовых передач
369
22-28 связаны со звеньями 2-7, Тросовые передачи пропущены через направляющие ролики и укреплены на ведомых роликах, жестко связанных со звеньями руки. С механизмом компенсации кинематически (через редукторы с передаточным отношением i) связан механизм ттяжения, содержащий ряд сумматоров-дифференциалов 29-35 и торсион 36. Последний дифференциал 35 ряда одним из входоЬ связан с торсионом 36, второй конец которого соединен с натяжной тросовой ветвью 37, пропущенной через установлен1П)1е в шарнирах с возможностью вращения ролики 38-43 и укрепленной на роУтке 44 последнего звена.
С валами индивидуальных приводов 16, 17 и 18 звеньев 3, 4 и 5 кинематически связаны дифференциалы 45, 46 и 47 механизма уравновепшвания. Вход каждого из этих дифференциалов связан с выходом предыдущего. Один вход дифференциала 45 укреплен неподвнжно. Выходы дифференциалов 45, 46 и 47 кинематически связаны с кривошипами синусных механизмов 48, 49 и 50 на выходах которых, т.е. между ползунами и основанием, помещены упругие элементы 51, 52 и 53.
При вращении индивидуальных приводов 15-21 движения передаются на дифференциалы 8-14 механизма компенсации, а с него - тросовым передачам 22-28, которые перемещают звенья 2-7. Кроме того, движения передаются на дифференциалы 29-35, которые суммируют дазижения индивидуаль}п 1х приводов и обеспечивают вращение торсиона 36 без его раскрутки, поддерживая заданное торсионом натяяйние тросовой ветви 37, которая через ролики 38-43 и ролик 44 обеспечивает натяжение соединенных звеньев руки. Одновременно от приводов 16, 17 и 18 начинает работать так же и уравновешивающий механизм с дифференциалами 45, 46 и 47, синусными меха1шзмами 48, 49 и 50 и упругими элементами 51, 52 и 53, например пружинами.
Так как входы дифференциалов 8-14 механизма компенсации кинематически связаны с . входами дифференциалов 29-35 механизма натяжешм, то все дифференциалы 8-14 оказываются в контуре натяжения, тем самым достигается выборка зазоров и натяжение основных передач, установленных на основании. Меха1шзм компенсации позволяет управлять приводами 15-21 без взаимовлияния движений с помощью дифференциалов 8-14. Так, например, если работает привод 15, передающий посредством тросовой передачи 22 движение звену 2, то в сипу того, что все остальные тросовые передата 23-28 начнут откатываться по своим направляющим роликам, звенья 3-7 так же должны прийти в движение (паразитное). Однако этого не происходат, поскольку с привода 15 движение передается на ряд последовательных дифференциалов 9-14, которые через тросовые передачи 23-28 сообщают звеньям 3-7 движение на тот же угол в направлении, обратном паразитному.
В результате при повороте привода 15 повернется только звено 2, а относительные положения остальных звеньев 3-7 останутся при этом неизменными. Аналогично производится компенсация при работе всех других индивидуальных приводов.
V Работа уравновешивающего механизма руки связана с вращением индивидуальных приводов 16, 17 и 18. Кинематически связанные между собой дифференциалы 45, 46 и 47 обеспечивают такое суммирование движений приводов 16, 17 и 18, что в каждый момент времени валы упомянутых двигателей чувствуют разгружающие моменты от синусных механизмов 48, 49 и 50, нагруженных усилиями упругих элементов 51, 52, 53. Эти разгружающие моменты в точности равны моментам от весов трех основных (тяжелых) звеньев руки, т.е. моменты от сил веса звеньев будут скомпенсированы усилиями упругих элементов, а индивидуальные приводы будут разгружены от статических моментов. Тем самым установочная мощность двигателей будет уменьшена более чем в два раза.
Формула изобретения.
Механическая рука, содержащая основание, п щарнирно соединенных звеньев, у которых гл последовательных шарниров имеют горизонтальные оси, причем п m 2, индивидуальные приводы каждого звена и механизм компенсации кинематического взаимовлияния перемещений звеньев, отличающаяся тем, что, с целью уменьшения мощности приводов, рука снабжена рядом сумматоров-дифференциалов и синусных механизмов с упругими элементами, установленными на выходах синусных механизмов, причем вход каждого из сумматоров кинематически связан с индивидуалы шш приводом и предыдущим сумматором, выход - с последующим сумматором и с входом синусного механизма, а вход первого сумматора закреплен на основании.
Источники информации, принятые во внимание при экспертизе 1. Станки и инструменты, 1976, № 4, с. 4ЧулгиЛ I It | I j j I I j t j I j
