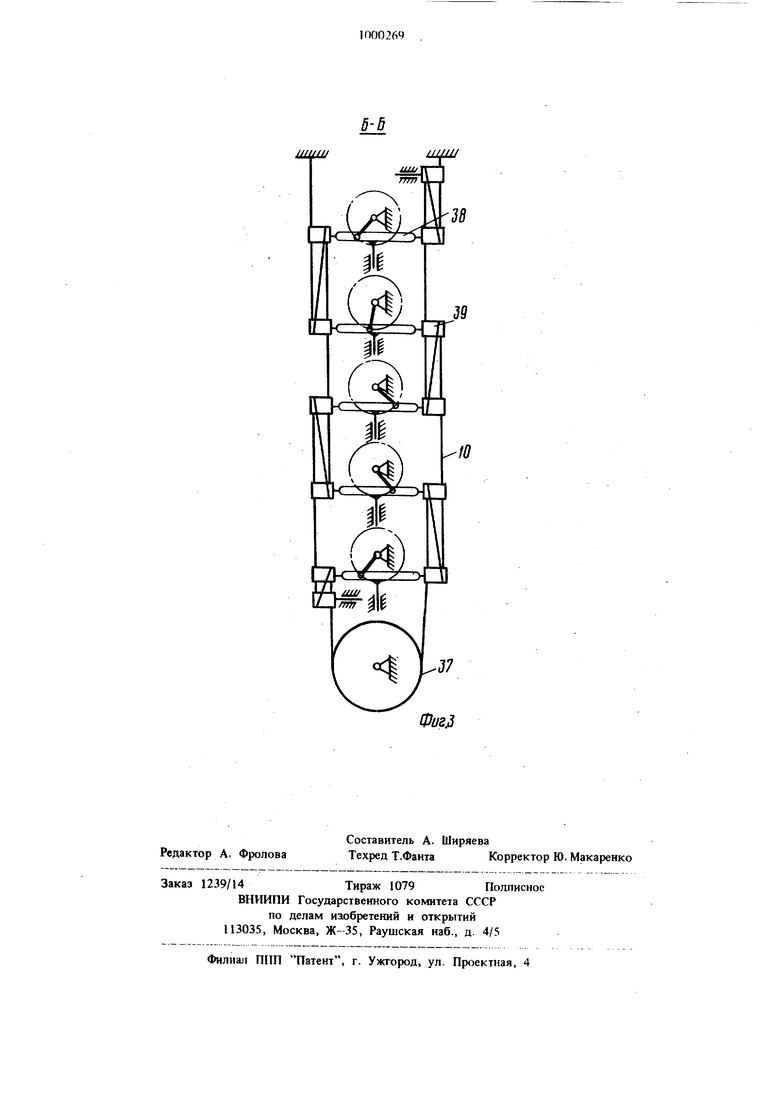
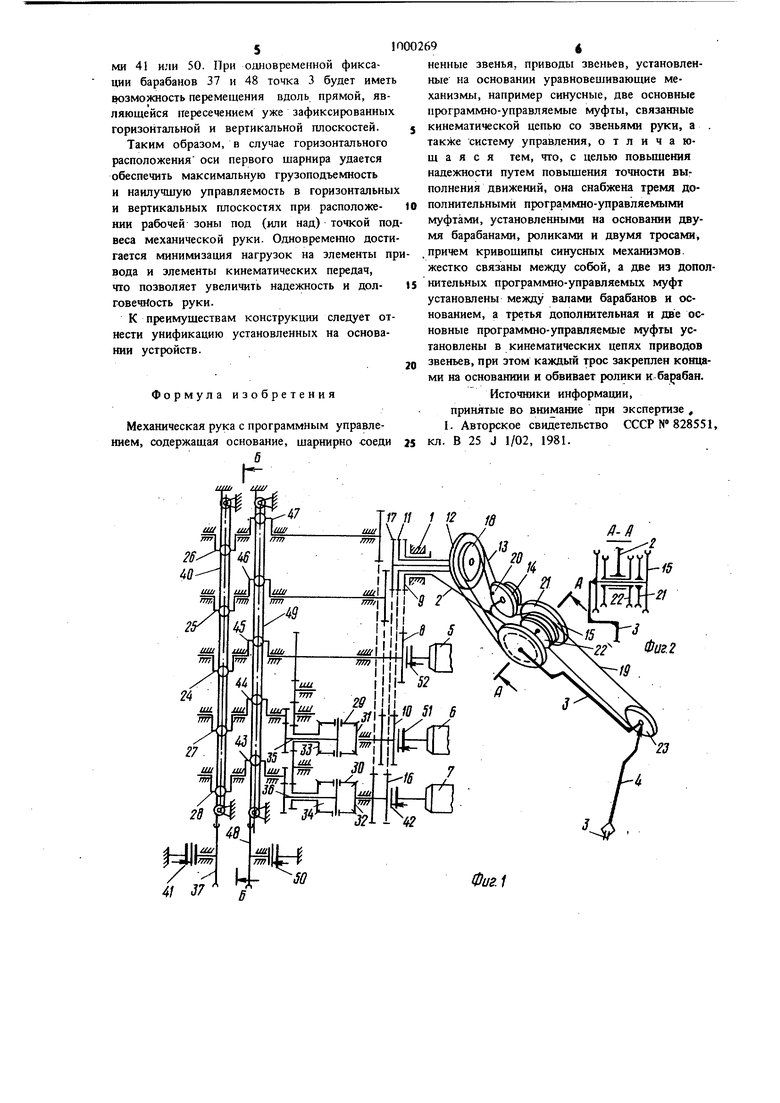
(54) МЕХАНИЧЕСКАЯ РУКА С ПРОГРАММНЫМ УПРАВЛЕНИЕМ Механическая рука с программным управ пением относится к машиностроению, а именно к устройствам, предназначенным для выполнения технологических операций в горячих, радиоактивных и других зонах, а . также для механизации и автоматизации опеР9ЦИЙ в промышленности. Известна механическая рука с программны управлением, содержащая основание, шарнирно соединенные звенья, приводы звеньев, установленные на основании ураановешиваюшне механизмы, например синусные, две программно-управляемые муфты, связанные кинематической цепью со звеньями руки 1 . Недостатком известной конструкции является низкая надежность рботы механизма из-за повышенных нагрузок, возникающих пр отключении ггривода одного из звеньев механической руки. Цель изобретения повышение надежности механизма путем повышения точности отрабатываемых траекторий в горизонтальных и вертикальных плоскостях. Поставленная цель достигается тем, что механическая рука с программным управлением, содержашая основание, шарнирно соединенные звенья, приводы звеньев, установленные на основании уравновешивающие механизмы,например синусные, две основные программно-управляемые муфты, связанные кинематическими передачами со звеньями руки, снабжена дополнительно тремя програмлшоуправляемыми муфтами, установленными на основании двумя барабанами, роликами и двумя трюсами, закреш1енными на основании и обвивающими ролики и барабан, причем кривошипы синусных механизмов жестко связаны между собой, а две из дополнительных программно-управляемых муфт установлены между валами барабанов и основанием, а третья дополнительная и две основные программно-управляемые муфты установлены в кинематических цепях приводов звеньев. На фиг. 1 представлена кинематическая схема механической руки; на фиг. 2 .-- сечение А-А на фиг. 1; на. фиг. 3 -- сечение Б-Б на фиг. 1. Механическая рука содержит (зсионаиие 1 и образована последовательностью шарнирно соединенных звеньев 2-4. Звено 2 посредством шарннра с горизонтальной осью крепит ся на основании 1. 111арниры, соединяюи1ие звенья 2 и 3, 3 и 4, имеют параллельные оси, перпендикулярные оси вращения звена 2. Угол наклона этих осей к горизонту зависит от конфигурации руки. Приводы 5-7 звеньев установлены на основании и посредством кинематических зубчатых и тросовых передач связаны со звеньями 2-4 соответственно, при зтом привод 5 зубчатой -передачей 8 и 9 кинематически связан со звеном 2, привод 6 зубчатой передачей 10 и 11 и тросовой передачей, содержашей ведущий ролик 12, трос 13 направляющий ролик 14 и ведомый (двойной) ролик 15, укрепленный на звене 3, кинематически связан со звеном 3. Привод 7 передачей 16 и 17 и тросовой передачей, содержащей ролик 18, трос 19, направляющие ролики одинарные 20 и 21 и двойной 22, установленные с возможностью вращения относительно звеньев 2 и 3 и ведомого ролика 23, укрепленного на звене 4, кинематически связан со звеном 4; При зтом концы троса 19 жестко закреплены на двойном ролике 22. Эти же передачи образуют кинематические цепи, связывающие подвижные звенья 2-4 с кривощипами 24-26 пружинно уравновещивающих механизмов. Кроме того, на основании 1 установлены пружинно-уравновещивающие механизмы с выходными кривошипами 27 и 28 и два механических сумматора-дифференциала 29 и 30. Вход 31 дифференциала 29 кинематически связан с кривошипами 25 пружинно-уравновещивающего механизма, а вход 32 дифференциала 30 - с кривощипом 26, вторые входы 33 и 34 дифференциалов 29 и 30 кинематическими передачами связаны с кривощипом 24. Наконец, третьи входы 35 и 36 дифференциалов 29 и 30 зубчатыми передачами связаны с кривощипами 27 и 28 соответственно i На основании 1 установлен с возможность вращения барабан 37. Ползуны 38 синусных механизмов пружинно-уравновещивающего уст ройства оснащены роликами 39. Трос 40, закрепленный ко1цами на основании 1, обви вает указанные ролики 39 и барабан 37. Ме ханическая рука снабжена также двумя программно-управляемыми муфтами 41 и 42, пр чем одна из муфт является тормозом барабана 37, а вторая установлена в кинематичес кой цепи привода звена 4.. Мехакическая рука снабжена также допопнительно рядом синусных механизмов, криво щипы 43-47 которых жестко связаны с кри вощипами 28, 27, 24, 2.S и 26 соотвотственно синусных механизмов пружинно-уравновешиваюп1его устройства и повернуты относительно них на 90° барабаном 48, установленные с возможностью вращения на основании, роликами, оси KOiOpbix укреплены на ползунах синусных механизмов, и тросом 49. Трос 49 обвивает барабан 48 и ролики, связанные с ползунами синусных механизмов, и закреплен концами на основании 1. Между барабаном 48 и основанием 1 установлена программно-управляемая муфта 50. Еще две программно управляемые муфты 51 и 52 установлены в цепях приводов звеньев 3 и 2 соответственно. Механическая рука работает следующим образом. Условия принадлежности точки 3 вертикальной плоскости будут иметь вид fР I SC05Cf - bjCOSiqi t cfj)(4) COS ЧЧ(2 ФзиВзС05 С(.2+Чз-ЧИ const Ц) (2,(f, - соответственно углы поворотов звена 2 относительно основания 1; звена 3 относительно звена 2; звена 4 от.носительно звена 3. Аналогично условие принадлежности точки 3 горизонтальной плоскости I B 5inqi,,(|),HS3Sin(4i +q jfcp3 2 5vn())-6jSini,q)j4q)4q)) const. При вращении приводов 5-7 движения через зубчатые передачи 8 и 9, 10 и 11, 16 Tjf П соответственно передаются звену 2 и тросам 13 и 19, которые осуществляют перемещение звеньев 3 и 4. Углы (f ( и Cpj реализуются соответственно для первого и второго уравнений на кривошипах 24, 25, 27, 26, 28 и 45, 46, 44, 47, 43 синуснокосинусных уравновешивающих механизмах. Суммирование по каждому ряду механизмов осуществляется на барабанах 37 и 48 соответственно с помощью тросов 40 и 49, закрепленных концами на основании 1 и обвивающих упомянутые барабаны 37 и 48 и ролики 39, установленные с возможностью вращения на выходных ползунах синусных механизмов и на основании. Фиксация величин сумм осуществляется с помощью программно-управляемых 50 и 41, установленных на барабанах 37 и 48. В конструк ции предусмотрена установка программно-управляемых муфт 42, 51 и 52 в кинематических цепях приводов 7, 6 и 5, позволяющих отключать приводы при реализации стереотипных движений, обеспечиваемых муфтами 41 или 50. При одновременной фиксации барабанов 37 и 48 точка 3 будет имет возможность перемещения вдоль прямой, являющейся пересечением уже зафиксированных горизонтальной и вертикальной плоскостей. Таким образом, в случае горизонтального расположения оси первого шарнира удается обеспечить максимальную грузоподъемность и наилучшую управляемость в горизонтальны и вертикальных плоскостях при расположении рабочей зоны под (или над) точкой по веса механической руки. Одновременно дости гается минимизация нагрузок на элементы п вода и элементы кинематических передач, что позволяет увеличить надежность и долговечность руки. К преимуществам конструкции следует от нести унификацию установленных на основании устройств. Формула изобретения Механическая рука с программным управлением, содержашая основание, шарнирно соеди js кл. В 25 J 1/02, 1981. 694 ненные звенья, приводы звеньев, установленные на основании уравновешивающие механизмы, например синусные, две основные программно-управляемые муфты, связанные кинематической цепью со звеньями руки, а . также систему управления, отличающаяся тем, что, с целью повьоиения надежности путем повышения точности выполнения движений, она снабжена тремя дополнительными программно-управляемыми муфтами, установленными на основании двумя барабанами, роликами и двумя тросами, причем кривошипы синусных механизмов. жестко связаны между собой, а две из дополнительных программно-управляемых муфт установлены между валами барабанов и основанием, а третья дополнительная и две основные программно-управляемые муфты установлены в кинематических цепях приводов звеньев, при этом каждый трос закреплен концами на основаниии и обвивает ролики к барабан. Источники информации, принятые во внимание при экспертизе , I. Авторское свидетельство СССР N 828551,
///////у
J7
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Копирующий манипулятор | 1980 |
|
SU901045A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1983 |
|
SU1132167A2 |
| Летучие ножницы | 1977 |
|
SU742054A1 |