I
Изобретение относится к машиностроению и предназначено для усовершенствования автоматических манипуляторов с программным управлением, используемых для автоматизации производства в промышленности.
Известен автоматический манипулятор с программным управлением, содержащий- программное устрси ство, следящие приводы, состоящие из двигателей и связанных с их управляющими входами блоков управления по скорости, механическую руку, выполненную в виде основания, шарнирно соединенных звеньев, смонтированных на звеньях кинематических передач для перемещения звеньев от двигателей и дополнительных кинематических цепей, содержащих программно-управляемые муфты Dl.
Однако 8 известной конструкции управление по нескольким степеням свободы осуществляется от одного управляемого привода, причем другие
приводы отключаются от руки программно-управляемыми муфтами,ЧТО естественно, ограничивает производительность, вызывает повышенный износ деталей, а также требует установки дополнительных программно-управляеьых муфт в цепях приводных двигателей ,
Цель изобретения - повышение производительности манипулятора и увеличение его долговечности при одновременном упрощении его механической части.
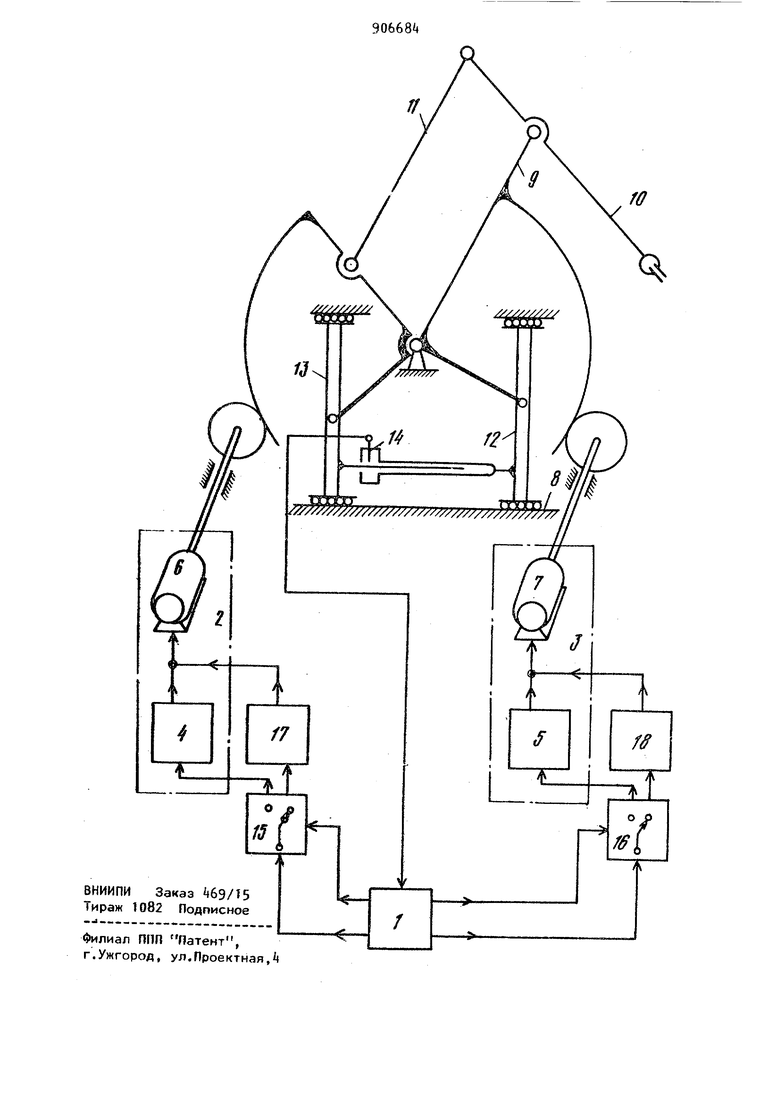
Поставленная цель достигается тем, что в известном автоматическом манипуляторе с программным управлением, содержащем программное устройство, следящие приводы, состоящие из блоков управления по скорости и двигателей, механическую руку, выполненную в виде основания, шарнирно-соединенных звеньев, смонтированных на звеньях кинематических передач для перемещения звеньев от двигателеи и дополнительных кинематических цепей с программно-управляеMWh) муфтами, следящие приводы снабжены дополнительными узлами, состоящими из программно-управляемых комму таторов и блоков управления по моменту, причем сигнальные и управляющие входы коммутаторов соединены с программным устройством, один из выходов каждого коммутатора соединен с одним из блоков управления по скорости, а другой - с одним из блоков управления по моменту, выходы блоков упраапения по моменту подключены к управляющим входам двигателей. Оба блока управления каждого привода поочередно работают на один и тот же двигатель. При включении стереотипных движений это дает возможност отказаться от программно-управляемых муфт в цепях приводных двигателей, так как в этом случае приводы, управляемые по моменту, помогают сле дящим приводам с управлением по скорости перемещать в рабочем пространстве механическую руку, при этом величины и знаки моментов определяются программным устройством. На чертеже изображена блок-схема автоматического манипулятора с программным управлением и механизмом реализации стереотипных движений кисти по вертикальным прямым. Автоматический манупулятор содер жит программное устройство 1, следящие приводы 2 и 3, состоящие из блоков управления и 5 по скорости и двигателей 6 и 7 механическую руку, выполненную в виде основания 8, шарнирно соединенных звеньев 9 и 10, смонтированную на звене 10 кинематическую передачу П для пере мещения звена 10 от двигателя 6, синусно-косинусных механизмов 12 и 13, соединяемых муфтой 1, управляе мой от программного устройства 1, коммутаторов 15 и 16, включающих по команде от блока 1 блоки управле ния 4 и 5 по скорости или блоки упра ления 17 и 18 по моменту. Манипулятор работает следующим образом. При включении стереотипного движения кисти механической руки по ве тикали срабатывает от блока 1 муфта 1, которая кинематически связывает в целое через синусно-косинусные механизмы 12 и 13 звенья руки 9 4 9 и 10, В общем случае, управление может осуществляться от любого из двигателей 6 или 7. Пусть двигатель 6 будет ведущим (управляемым по координатам от программного устройства 1), В этом случае управляющий сигнал от блока 1 через коммутатор 15 поступает в блок управления по скорости и далее на двигатель 6, Как известно, следящий привод характеризуется зависимостью U)--K-UCA-, ™ сл напряжение, подаваемое на вход следящего привода; k коэффициент пропорциональности , ии - скорость двигателя. При подаче управляющего напряжения из программного устройства 1 через коммутатор 15 в блок k кисть механической руки начнет перемещаться по вертикали. При этом двигатель 7 управляется от программного устройства 1 через коммутатор 16 блоком управления 18 по моменту, который характеризуется зависимостью М к- и напряжение, подаваемое на вход блока, управляемого по моменту; К - коэффициент пропорциональности ; М - момент, развиваемый двигателем. Величина и знак момента задается от программного устройства такой, чтобы двигатель 7 помогал двигателю 6 перемещать механическую руку в рабочем пространстве. Введение новых блоков повышает производительноеть автоматического манипулятора, так как в отличие от известного перемещение осуществляется от всех двигателей в оптимальном режиме, что одновременно снижает нагрузки на передачи. Это положительно сказывается на их долговечности. Кроме того, из кинематической схемы манипулятора исключаются мощные соединителы-ые муфты между приводными двигателями и механической рукой, рассчитанные на полный момент двигателя, что упрощает кинематическую схему. Формула изобретения Автоматический манипулятор с про граммным управлением, содержащий программное устройство, следящие приводы, состоящие из двигателей и связанных с их управляющими входами блоков управления по скорости, меха ническую руку, в виде шарнирно соед ненных звеньев, связанных кинематическими передачами с приводами их перемещения и дополнительными кинематическими цепями с программно-управляемыми муфтами, о т л и чающийся тем, что, целью повышения производительности манипулятора, увеличения его долговечности, и упрощения его механической части. Ц6 каждый следящий привод снабжен программно-управляекым коммутатором с сигнальным и управляющим входами и двумя выходами, а также блоком управления по моменту, причем входы каждого коммутатора соединены с программным устройством, а выходы - с блоками управления по скорости, и по моменту соответственно, при этом выход блока управления по моменту подключен к управляющему входу двигателя. Источники информации, принятые во внимание .при экспертизе 1. Авторское свидетельство .СССР по заявке ff 2627590/25-08, кл. В 25 J 1/10, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Копирующий манипулятор | 1979 |
|
SU812562A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Манипулятор | 1980 |
|
SU891425A1 |