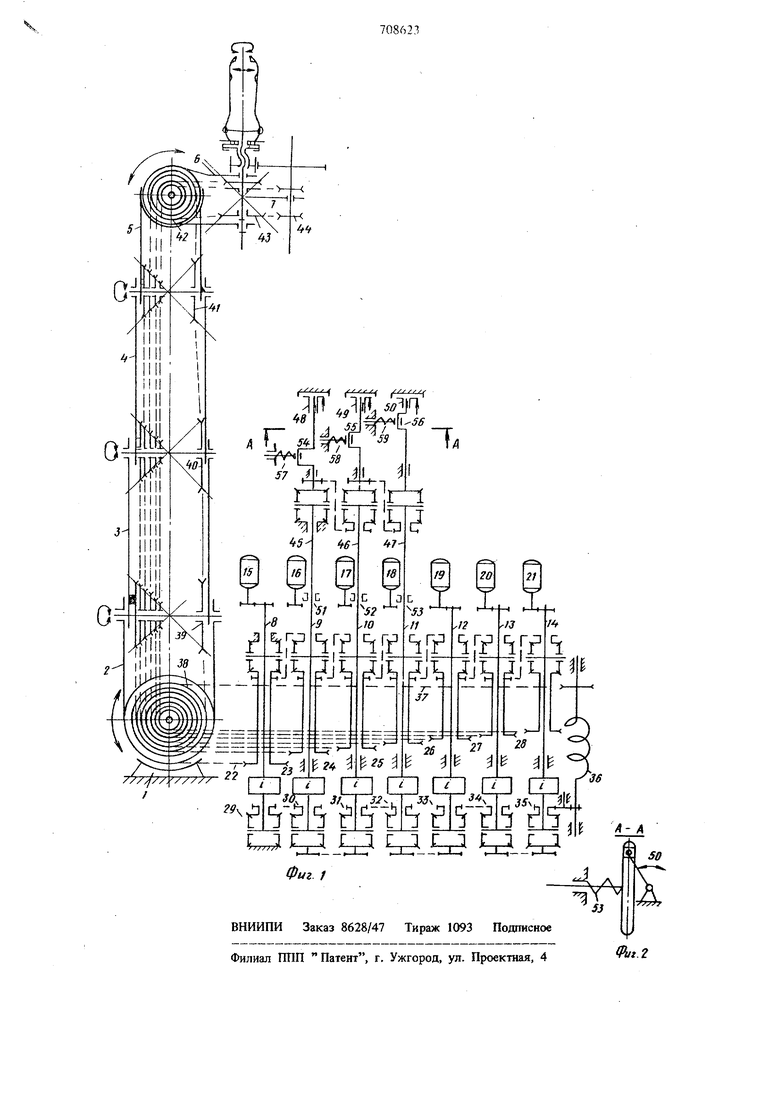
Изобретение относится к машиностроению и касается манипуляторов, используемых для механизации основных и вспомогательных операций в промышленности. Известна механическая рука, содержащая основание, шарнирно соединенные звенья, у,которых ряд последовательных шарниров имеют горизонтальные оси поворота, индивидуальные приводы каждого звена, механизм компенсации кинематического взаимовлияния перемещений звеньев и систему программного управления 1. Однако такая механическая рука не может обеспечить движение с постоянным углом наклона какого-либо звена к горизонтальной плоскости с повышенной точностью, требуемой для выполнения ряда технологических операций. Целью изобретения является расширение технологических возможностей механической руки Поставленная цель достигается тем, что механическая рука снабжена двумя группами муф и рядом дифференциалов, выход первого из которых закреплен на основании, а выходы др гих кинематически связаны с соседними дифференциалами и с первой группой муфт, причем выходы 1шфферекциалов кинематически связаны с ИНДИЕЙдуатьными приводами звеньев с горизонтальными осями поворота через вторую группу муфт. Каждая муфта может быть связана с системой программного управления, а на выходе дифференциалов могут быть установлены синусные механизмы с упругими элементами. На фиг. 1 изображена кинематическая схема механической руки; на фиг. 2 - сечение по А-А фиг. 1. Механическая рука образована последовательно установленными на основании 1 и шарнирно соединенными звеньями 2-7. Звено 2 посредством шарнира крепится на основании 1. Там же установлены механизм компенсации, образованный рядом дифференциалов 8-14, и индивидуальные приводы 15-21, связанные со звеньями руки кинематическими цепями, вьшолненными, например, на тросовых передачах 22-28. Натяжение всей системы передач1г руки осушествляется механизмом, содержа гцим ряд сумматоровдифференциалов 29-35 с согласующими редукторами i (если это необходимо), торсион 36 и натяжную тросовую ветвь 37, уложенную на ролики 38-44. На ведущих валах дифференциалов 9-11 приводов звеньев с горизонтальными осями поворота установлен ряд дифференциалов 45-47, входы которых связаны с индивидуальными приводами 16-18. Один выход дифференилала 45 связан с основанием, а аналогичные выходы дифференциалов 46 и 47 кинематически связаны с соседними диффере5щиалами. На вторых выходах дифференциалов 45-47 установлены программно управляемые муфты 48-50 (перва группа муфт), а индивидуальные приводы 1618 связаны с приводной кинематической цепью через программно управляемые муфты 51-53 (вторая группа муфт). При большом весе звеньев руки целесообраз на установка уравновешивающего механизма, позволяющего уменьшить мощность управляемых двигателей. Этот меха1шзм выполнен на сипус1&1х механизмах 54-56, оснащенных упругими элементами 57-59 и связанных с выходами дифференциалов 45-47. Механическая рука работает следующим образом. При враще1гии приводов 15-21 по сигналам от программного устройства движение передается на механизм компенсации, а с него - приводным тросовым передачам 22-28, которые осуществляют соответствую1дие программные перемещения звеньев 2-7. Кроме того, движение поступает на сумматоры-дифференциалы 29-35, которые должным образом сумми руют углы поворота индивидуальных приводов и обеспечивают вращение торсиона 36 без его раскрутки, поддерживая зада1шое натяжение в кинематической цепи с помощью тросовой ветви 37. Дифференциалы 45-47 суммируют углы поворота предыдущих звеньев. Если, например, необходимо выполнять дви жения с постоянным утлом наклона эвена 5 к горизонтальной плоскости, по программе включаются муфты 50 и 53. При этом веду1ЦИЙ вал привода эвена 5 получает вращение не от индивидуального привода Г8, а череэ ифференциалы 45-47 от ищщвидуальньгх приводов 16 и 17. Следовательно, при повороте эвена 3 или 4 для выполнения условия постоянства суммы углов поворотов звеньев 3-5 вращение будет передаваться с приводом 16 и 17 через дифференциалы 45-47 на приводное звено 5, стабилизируя его угловое положение относительно горизонтальной плоскости. Точность выполнения заданного стереотипного движения будет существенно выше, чем при обычном программном управлении, так как между углами поворота звеньев 3-5 реализуекя жесткое кинематическое соотношение. Формула изобретения 1. Механическая рука, содержащая основание, щаршгрно соедине1шые звенья, у которых ряд последовательных шарниров имеют горизонтальные оси поворота, индивидуалып)1е приводы каждого звена, механизм компенсации кинематического взаимовлияния перемещений звеньев и систему программного управления, отличающаяся тем, что, с целью расширения технологических возможностей, рука снабжена двумя группами муфт и рядом дифференциалов, выход первого из которых закреплен на основании, а выходы других кинематически связаны с соседними дифференциалами и с первой группой муфт, причем входы дифференциалов кинематически связаны с индивидуальными приводами череэ вторую группу муфт. 2. Рука по п. 1, отличающаяся тем, что каждая муфта связана с системой программного управления. 3. Рука по п. 1, отличающаяся тем, что на выходе дифференциалов установлены синусные механизмы с упругими элементами. Источники информащш, принятые во В1шмание при экспертизе 1. Станки и инструменты, 1976, N 4, с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Механическая рука | 1980 |
|
SU946917A1 |