(54) МЕХАНИЧЕСКАЯ РУКА С ПРОГРАММНЫМ УПРАВЛЕНИЕМ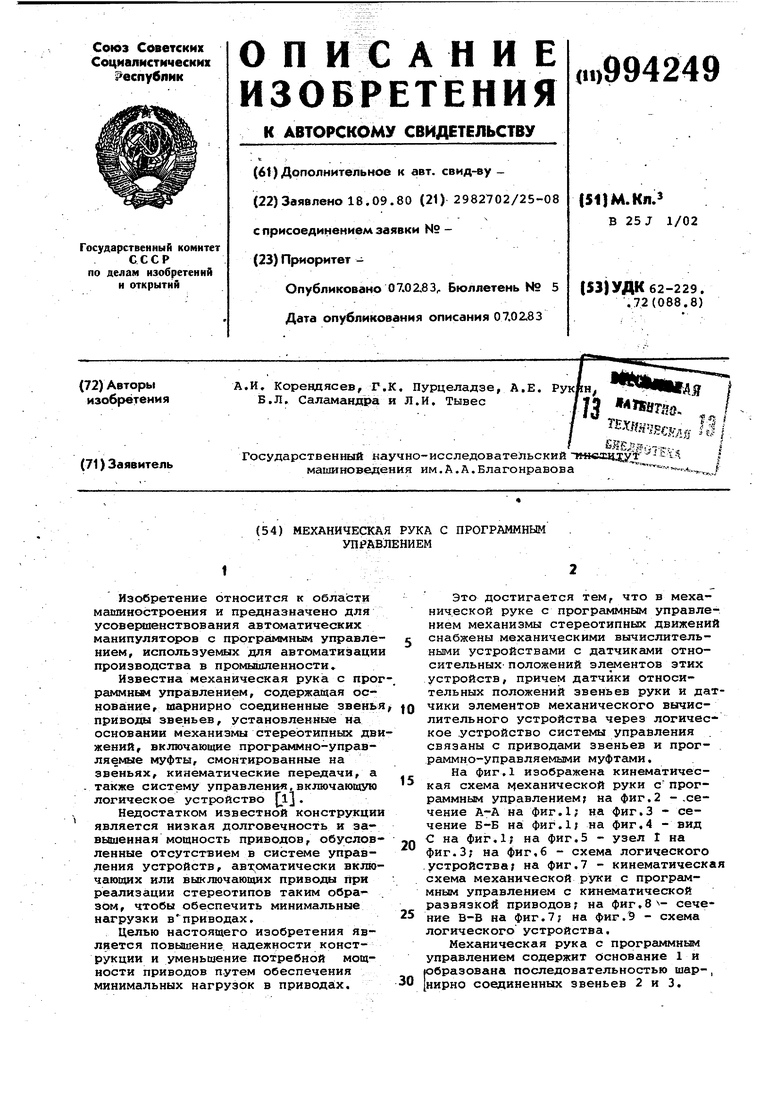
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Металлорежущий станок | 1974 |
|
SU519315A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Механическая рука | 1978 |
|
SU708624A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2130410C1 |
| Автоматический манипулятор с программным управлением | 1980 |
|
SU906684A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Механизм зажима и подачи прутка токарного многошпиндельного автомата | 1979 |
|
SU872038A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Механизм перемещения резака устройства для термической резки труб | 1981 |
|
SU996122A1 |
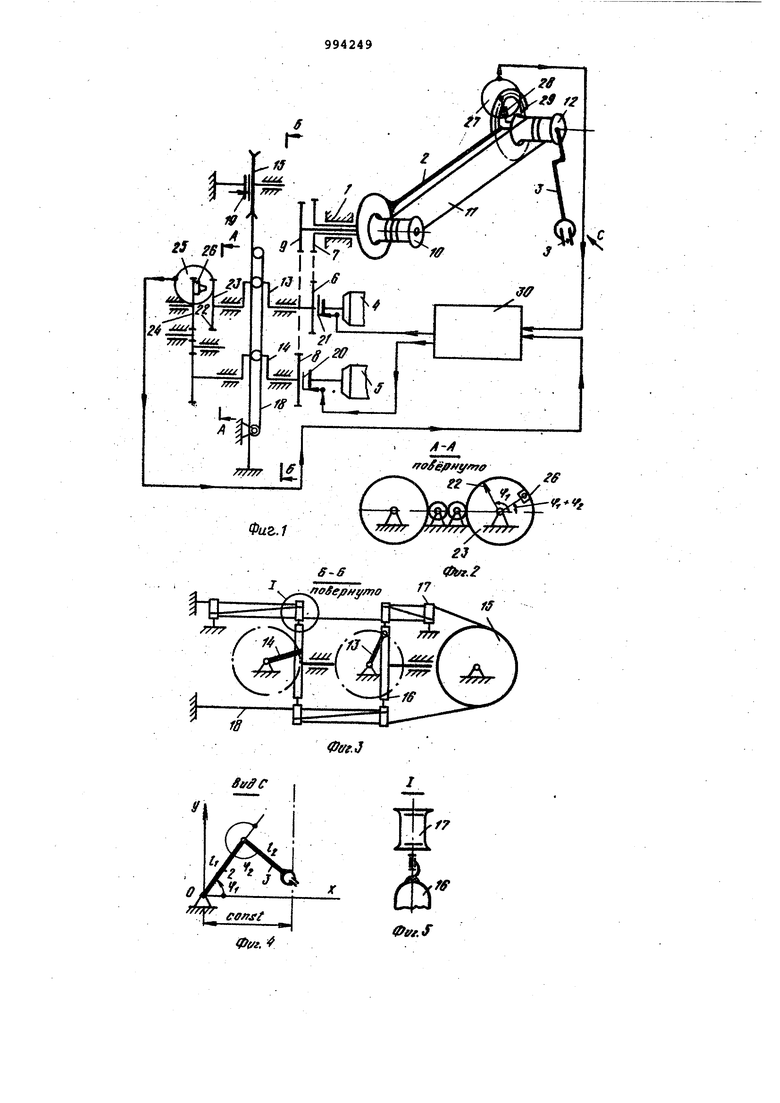

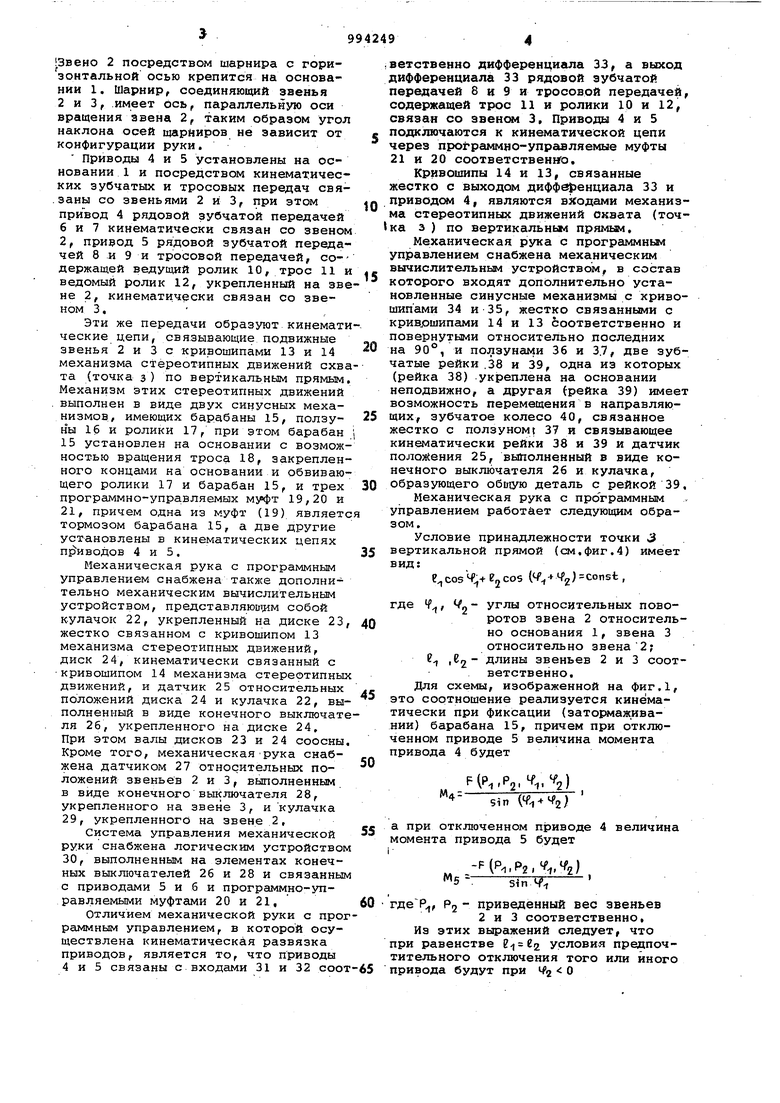
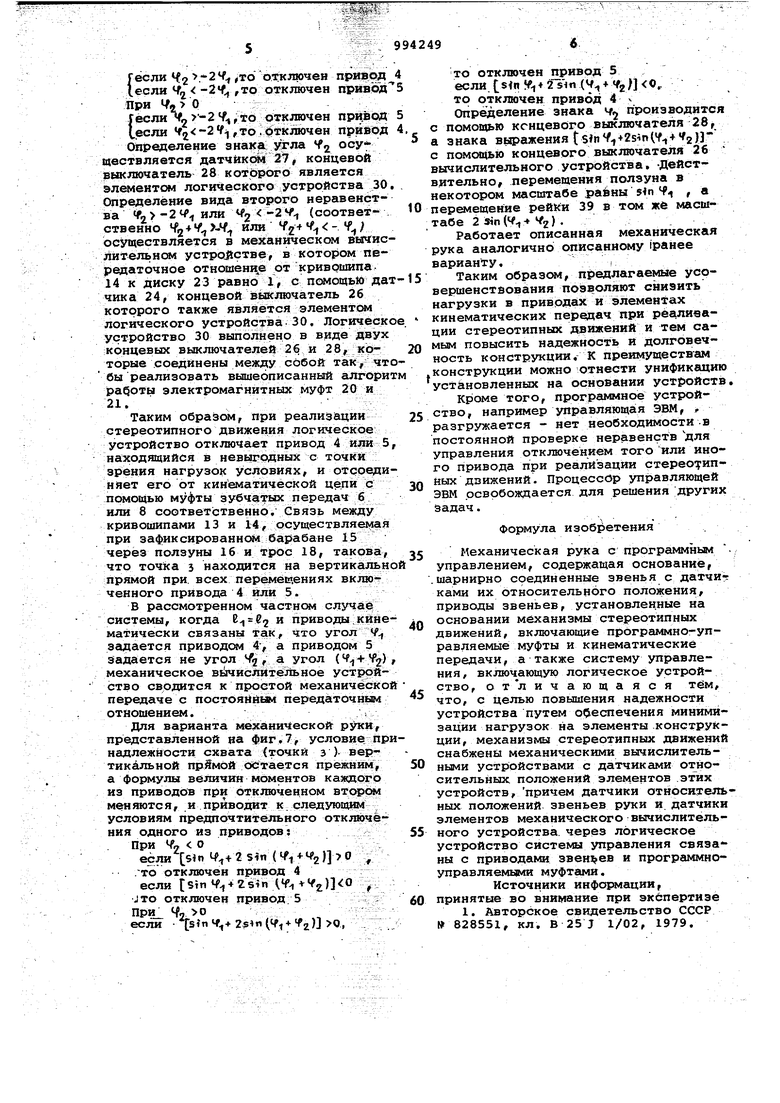
Изобретение относится к области машиностроения и предназначено для усовершенствования автоматических манипуляторов с пррграммн1®4 управле нием, используемых для автоматизаци производства в промышленности Известна механическая рука с про раммньм управлением, содержащая основание, шарнирно соединенные звень приводы звеньев, установленные на основании механизмы стереотипных дн жений, включающие программно-управляемые муфты, смонтированные на звеньях, кинематические передачи, а также систему управления,включающую логическое устрюйство j.j . Недостатком известной конструкци является низкая долговечность и завышенная мощность приводов, обуслов ленные отсутствием в системе управления устройств, авт.оматичесКи вклю чающих или выключающих приводы При реализации стереотипов таким образом, чтобы обеспечить минимальные нагрузки вприводах. Целью настоящего изобретения является повышение надежности конструкции и уменьшение потребной мощности приводов путем обеспечения минимальных нагрузок в привода:х. Это достигается тем, что в механической руке с программным управлением механизмы стереотипных движений снабжены механическими вычислительными устройствами с датчиками относительных- положений элементов зтих устройств, причем датчики относительных положений звеньев руки и датчики элементов механического вычислительного устройства через логическое .устройство системы управления связаны с приводами звеньев и программно-управляемыми муфтами. На фиг.1 изображена кинематическая схема механической РУки с программным управлением на фиг.2 -.сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - вид С на фиг.1; на фиг.З - узел I на фиг.З; на фиг,6 - схема логического устройства; на фиг.7 - кинематическая схема механической руки с программным управлением с кинематической развязкой приводов; на фиг. сечение В-В на фиг.7; на фиг.5 - схема логического устройства. Механическая рука с программным управлением содержит Основание 1 и бразована последовательностью шар-, нирно соединенных звеньев 2 и 3. 3вено 2 посредством шарнира с горизонтальной осью крепится на основании 1. Шарнир, соединяющий звенья 2 и 3, имеет ось, параллельную оси вращения звена 2, таким образом угол наклона осей шарниров не зависит от конфигурации руки. Приводы 4 и 5 установлены на основании 1 и посредством кинематических зубчатых и тросовых передач свя.заны со звеньями 2 и 3, при этом привод 4 рядовой зубчатой передачей 6 и 7 кинематически связан со звеном 2, привод 5 рядовой зубчатой передачей 8 и 9 и тросовой передачей, со-держащей ведущий ролик 10, трос 11 и ведомый ролик 12, укрепленный на зве не 2, кинематически связан со звеном 3. Эти же передачи образуют кинемати ческие цепи, связывающие подвижные звенья 2 и 3 с кривошипами 13 и 14 механизма стереотипных движений схва та (точка з) по вертикальным прямым Механизм этих стереотипных движений . выполнен в виде двух синусных механизмов, имеющих барабаны 15, ползун°ы 16 и ролики 17, при этом барабан 15 установлен на основании с возможностью вращения троса 18, закреплен ного концами на основании и обвиваю щего ролики 17 и барабан 15, и трех программно-управляемых 19,20 и 21, причем одна из муфт (19) являет тормозом барабана 15, а две другие установлены в кинематических цепях приводов 4 и 5. Механическая рука с программным управлением снабжена также дополнительно механическим вычислительным устройством, представляюшд м собой кулачок 22, укрепленный на диске 23 жестко связанном с кривошипом 13 механизма стереотипных движений, диск 24, кинематически связанный с кривошипом 14 механизма стереотипны движений, и датчик 25 относительных положений диска 24 и кулачка 22, вы полненный в виде конечного выключат ля 26, укрепленного на диске 24, При этом валы дисков 23 и 24 соосны Кроме того, механическая-рука снабжена датчиком 27 относительных положений звеньев 2 и 3, выполненным в виде конечного выключателя 28, укрепленного на звене 3, и кулачка 29,укрепленного на звене 2, Система управления механической руки снабжена логическим устройство 30,выполненным на элементах конечных выключателей 26 и 28 и связанны с приводами 5 и б и программно-управляемыми муфтами 20 и 21, Отличием механической руки с про раммным управлением, в которой осуществлена кинематическая развязка приводов, является то, что приводы 4 и 5 связаны с входами 31 и 32 соо ветственно дифференциала 33, а выход ифференциала 33 рядовой зубчатой передачей В и 9 и тросовой передачей, содержащей трос 11 и ролики 10 и 12, связан со звеном 3, Приводы 4 и 5 подключаются к кинематической цепи через программно-упрсшляемые муфты 21 и 20 соответствен о. Кривошипы 14 и 13, связанные жестко с выходом диффв|5енциала 33 и приводом 4, являются входами механизма стереотипных движений оквата (точка 3 ) по вертикальным прямым. Механическая рука с программным управлением снабжена механическим вычислительным устройством, в состав которого входят дополнительно установленные синусные механизмы с кривошипами 34 и 35, жестко связанными с кривошипами 14 и 13 соответственно и повернутыми относительно последних на 90°, и ползунами 36 и 3.7 f две зубчатые рейки .38 и 39, одна из которых (рейка 38) укреплена на основании неподвижно, а другая Дрейка 39) имеет возможность перемещения в направляющих, зубчатое колесо 40, связанное жестко с ползуном 37 и связывающее кинематически рейки 38 и 39 и датчик положения 25, выполненный в виде конечного выключателя 26 и кулачка, образующего общую деталь с рейкой 39, Механическая рука с программным управлением работает следующим образом. Условие принадлежности точки 3 вертикальной прямой (см,фиг.4) имеет вид: е cos Ч, 2 cos (Ч -f ) const, где f, Vn- углы относительных поворотов звена 2 относительно основания 1, звена 3 относительно звена2; звеньев 2 и 3 соответственно. Для схемы, изображенной на фиг.1, это соотношение реализуется кинематически при фиксации (затормаживании) барабана 15, причем при отключенном приводе 5 величина момента привода 4 будет P(.%. 2) Sin () а при отключенном приводе 4 величина момента привода 5 будет -F(P,,P2,V,,2) , -. ШЧ гдеР., р2 - приведенный вес звеньев 2 и 3 соответственно. Из этих выражений следует, что при равенстве УСЛОВИЯ предпочтительного отключения того или иного привода будут при Wj О
Гёсли 42 24,,то отключен привод 1если ,то отключен привод При Чв О
|если о -2Ч,,то отключен привод Сесли ,то.отключен привод Ойределевие знака угла V осуществляется датчиком 27, концевой выключатель 28 которого является элементе логического устройства 30. Определение вида второго неравенства ,-24 ИЛИ (соответСТВенНО 2 4 f -Ч или f - f )
осуществляется в механическом вычислительном устройстве, в котором передаточное отношени е от кривошипа14 к диску 23 равно 1, с помощью дат чина 24, концевой выключатель 26 которого также является элементом логического устройства-30, Логическо устройство 30 выполнено в виде двух концевых выключателей 26 и 28, которые соединены между собой так, что бы реализовать вышеописанный алгорит работы электромагнитных муфт 20 и 21.
Таким образом, при реализации с тереотипн ог о дв иже ни я лог иче ское устройство отключает привод 4 или 5, находящийся в невыгодных с точки зрения нагрузок условиях, и отсоединяет его от кин1ематической цепи с помощью муфты зубчатых передач б или 8 соответственно, Связь между кривошипами 13 и 14, осуществляемая при зафиксированнснл барабане 15 через ползуны 16 и трос 18, такова, что точка 3 находится на вертикально прямой при. всех перемещениях включенного привода 4 или 5.
В рассмотренном частнс случае системы, когда и приводы,кинематически связаны так, что угол Ч задается приводом 4-, а приводом 5 задается не угол Vj г угол (Ч.), механическое вйчислительное устройство сводится к простой механической передаче с постоянйым передаточным отношением.
Для варианта механической pjhcH, представленной на фиг,7, условие принадлежности схвата (точки з ) вертикальной примой остается прежним, а формулы величин моментов каждого из приводив при отключенном вторсм меняются, и приводит к следующим условиям предпочтительного отключения одного из приводов:
При 4V о если Siп Ч., 2 Sin (f1 Ч2) О ,
.ТО отключен привод 4 если + Zsin )0
JTO отключен привод 5
При Чь.о
если Tlsin 4,+ 2 (
то отключен привод 5
если sin У + 2sin(V + 2; 0.
то отключен привод 4 х
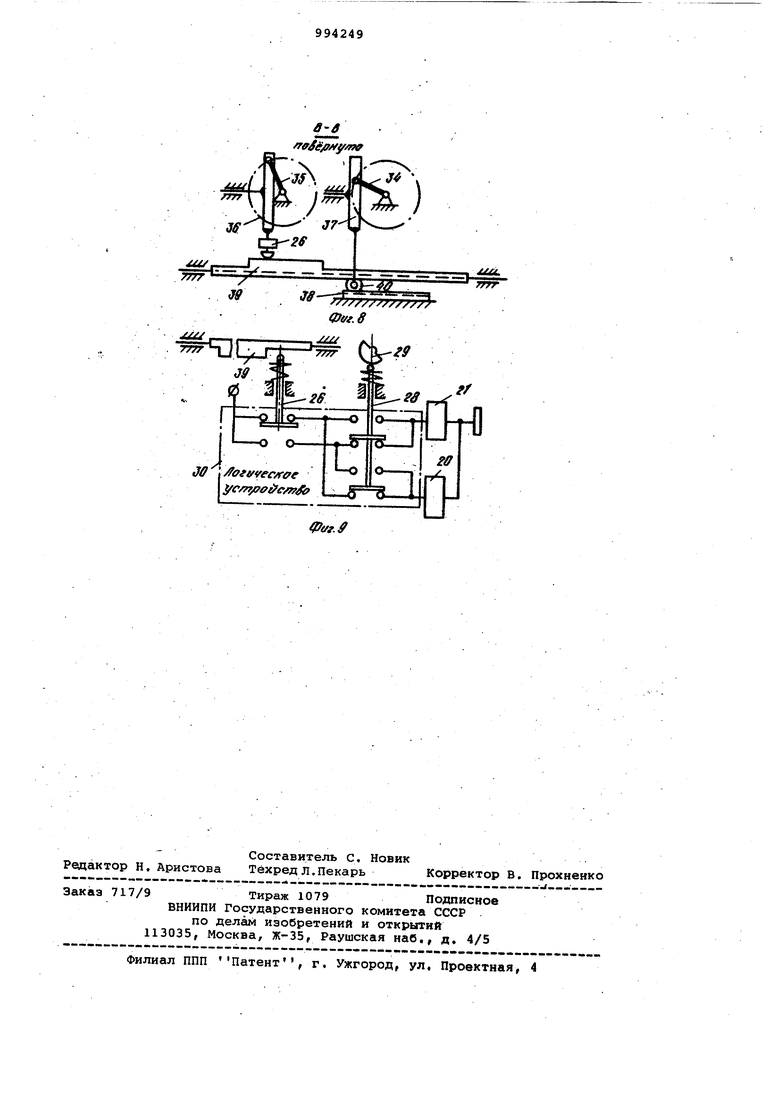
Определение знака ч производится с помощью кснцевого выключателя 28, а знака выражения ts n i+2sin(f.,+ «f2) с помощью концевого выключателя 26 вычислительного устройства, -Действительно, перемещения ползуна в некотором масштабе раины f , а перилещение рейки 39 в том же масштабе (%+У2)Работает описанная механическая рука аналогично описанному (ранее варианту,,
Таким образе, предлагаемые усовершенствования позволяют снизить нагрузки в приводах и элементах кинематических передач при реализации стереотипных движений и тем самым повысить надежность и долговечность конструкции, К преимуществам .конструкции можно отнести унификацию установленных на основании устройств
Кроме того, программное устройство, например управляющая ЭВМ, , разгружается - нет необходимости-в постоянной проверке неравенств для управления отключением того или иного привода при реализации стерео ипных движений. Процессор управляющей ЭВМ освобождается для решения других эадач.
Формула изоб1эетения .
Механическая рука с программный управлением, содержащая основание, .шарнирно соединенные звенья с датчиг ками их относительного положения, приводы звеньев, установленные на основании механизмы стереотипных движений, включающие программно-управляемые муфты и кинематические передачи, а также систему управления , включ ающую логическое устройство, отличающаяся тем, что, с це-пью повышения надежности устройства путем обеспечения минимизации нагрузок на элементы конструкции, механизмы стереотипных движений снабжены механическими вычислительными устройствами с датчиками относительных, положений элементов этих устройств, причем датчики относительных положений звеньев руки и датчики элементов механического вычислительного устройства, через логическое устройство системы управления связаны с приводами звеньев и программноуправляем1фли муфтами.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР №828551, кл, В 25J 1/02, 1979,
StfffC
Ф(/г.
f
fff
.Jf
ff
го
