to
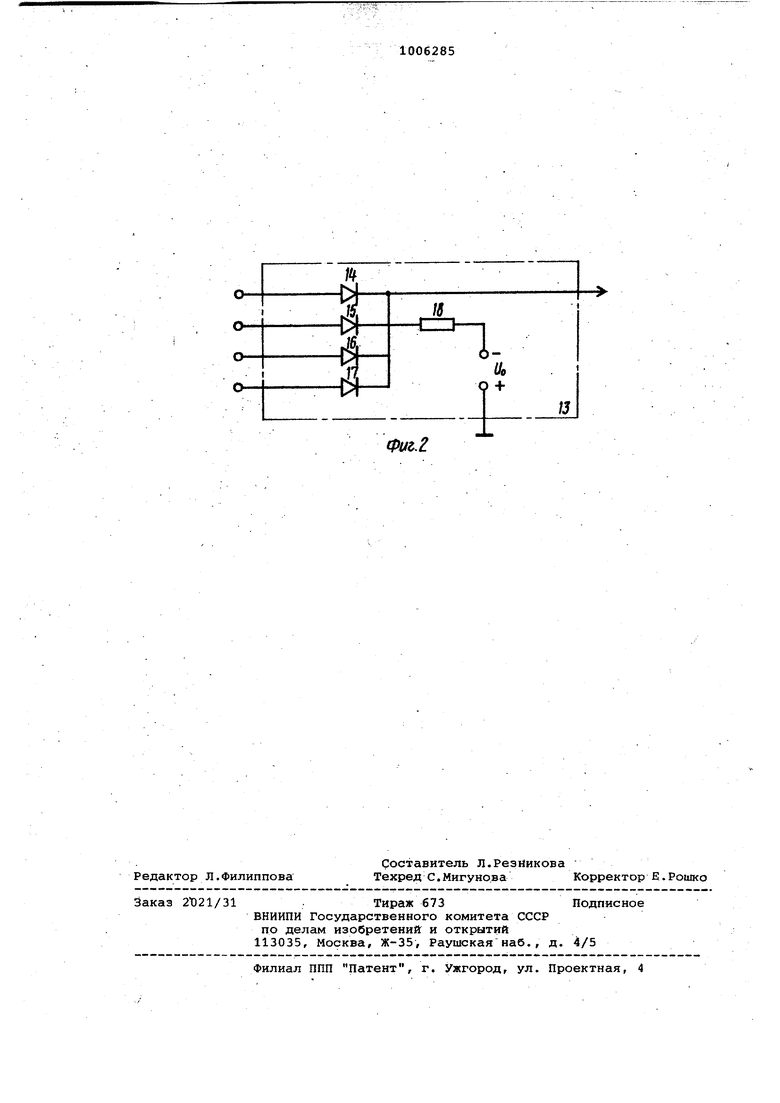
оо ел Изобретение относится к железнодо рЬжному транспорту, а именно, к системам, противодействующим скольжению колесных пар, и может быть применено на локомотивах, электропоездах и др гих, железнодорожных транспортных сре ствах. Известно устройство контроля скол жения колесных пар подвижного состава, содержащее датчики угловой скорости колесных пар, блок выбора кстремального сигнала, в.ыход которого сЪединен с одним из входов блока сравненияСИ. Целью изобретения является расширение функциональных возможностей устройства. Эта цель достигается тем, что уст ройстве контроля скольжения колесных пар подвижного состава, содержа щее даЛики УГЛОВОЙ скорости колесны пар, блок, выбора экстремального сиг нала , выход которого соединен с одни из входов блока сравнения, снабжено задатчиком режима движения и на каж дую колесную пару.- управляемым инверторс, информационный вход которо го соединен с соответствующим датчи ком угловой скорости, управляющий вход - с задатчиком режима движения .а выход - с одним из входов блока выбора экстремального сигнала и с другим входом соответствующего блока сравнения. На фиг.1 представлена структурна схема предлагаемого устройства контроля скольжения; на фиг.2 - пример выполнения блока выбора экстремаль.ного сигнала. Устройство содержит датчики 1-4 угловых скоростей колесных пар, соединенные через управляемые инверторы 5-8 с блоками 9 сравнения и с входами блока 13 выбора экстремального сигнала. Блок 13 содержит диоды 14-17, резистор 18 и источник опорного напряжения. Датчики 1-4 вырабатывают сигналы величины напряжений которых пропорциональны угловым скоростям соответствующих колесных пар транспортной единицы. Полярность сигналов датчиков показана на фиг.1. Эти сигналы поступают на входы инверторов 5-8 и если сигнал на управляющих входах инверторов отсутствует (это соответствует движению транспортной единицы в режиме торможения), то сигналы от датчиков скорости проходят через инверторы таким образом, что отрицательный полюс датчика скорости соединяется с общим проводом электрической схемы устройства. С выхода каждого инвертора сигнал поступает на один из входов блока 13 выбора экстремального сигнала и на один из входов соответствующего блока 9, 10, 11 или 12 сравнения. На другой вход каждого из этих блоков сравнения поступает сигнал от блока 13 выбора экстремального, сигнала. Поскольку в режиме торможения каждый из входов блока 13 с помощью инвертора соединен с положительным полюсом соответствующего датчика скорости, то блок 13 формирует на своем выходе максимальный по величине напряжения сигнсШ, т.е. блок 13 в режиме торможения является блоком выбора максимального сигнала. Данный сигнал сравнивается соответствующим блоком сравнения с сигналом датчика скорости и по результатам сравнения устройство вырабатывает сигнал о наличии юза контролируемой колесной пары. Если транспортная единица движется в режиме тяги (когда возможно боксование колесных пар), то на управляющие входы инверторов 5,6,7 и 8 поступает сигнал от задатчика режима движения.- По данному управляющему сигналу инверторы 5-8 осуществляют инверсию полярности сигналов датчиков скорости, так что положительный полюс каждого датчика скорости оказывается соединенным с общим проводом электрической схемы. В этом случае блок 13 формирует на своем выходе минимальный по величине напряжения сигнал, который сравнивается блоками 9-12 с сигналом соответствующего датчика скорости и по результатам сравнения вырабатывается сигнал о |наличии боксования соответствующей .колесной пары. Таким образом,введение коммутаторов полярности сигналов датчиков скорости позволяет обеспечить контроль как юза, так и боксования колесных пар подвижного состава, т.е. позволяет расширить функциональные возможности устройства контроля скольжения.
Фи.г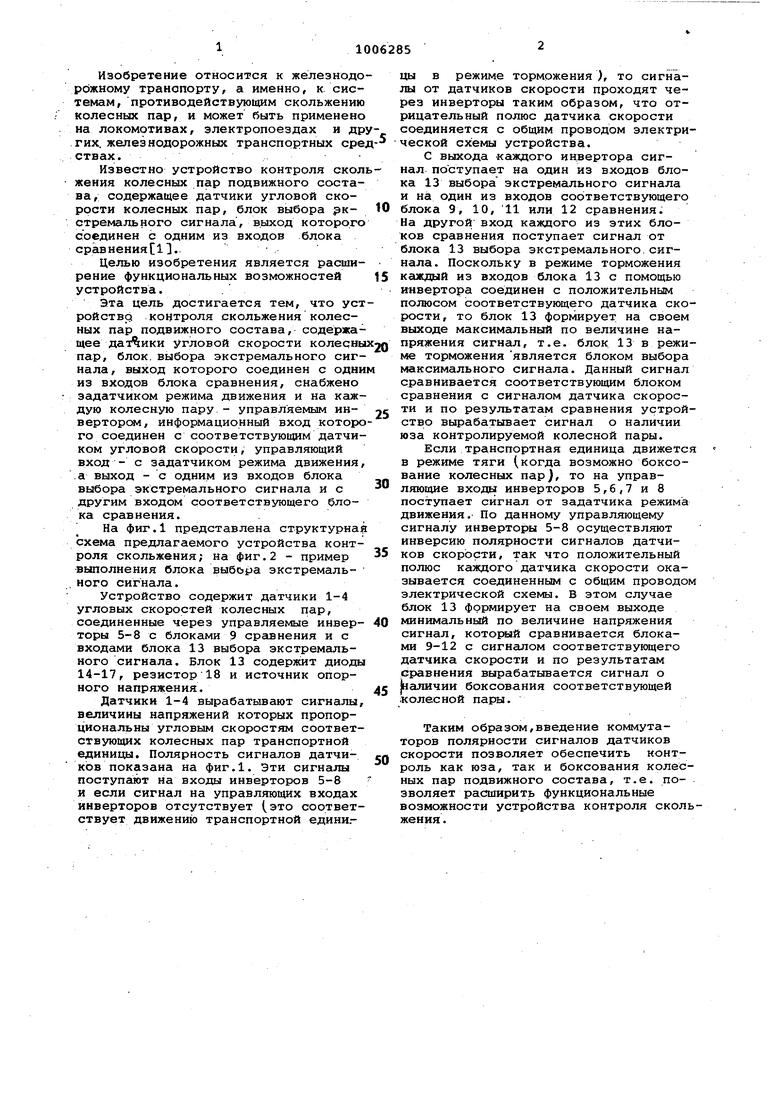
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от боксования и юза колес транспортного средства | 1983 |
|
SU1139653A1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОЦЕНКИ И РЕГУЛИРОВАНИЯ ПОТРЕБНОЙ МОЩНОСТИ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ГОРОДСКОГО ЭЛЕКТРОТРАНСПОРТА | 2005 |
|
RU2292273C1 |
| Устройство контроля скольжения колесных пар подвижного состава | 1978 |
|
SU749720A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |
| Способ адаптивного управления автоматической подачей песка под колеса локомотива | 2022 |
|
RU2780751C1 |
УСТРОЙСТВО КОНТРОЛЯ СКОЛЬЖЕНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА, содержащее датчики угловой скорости О Режим колесных пар, блок выбора экстремального сигнала, выход которого соединен с одним из входов блока сравнения отл ичающееся тем, что, с целью расширения .функциональных возможностей, оно снабжено задатчиком режима движения и на каждую колесную пару - управляемым инвертором, информационный вход которого соединен с соответствующим датчиком угловой скорости, управляющий вход - с задатчиком режима движения, а выход с одним из входов блока выбора экстремального сигнала и с другим входом соответствующего блока сравнения. Ш
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Противоблокировочное устройство для тормозной системы транспортного средства | 1974 |
|
SU665789A3 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
