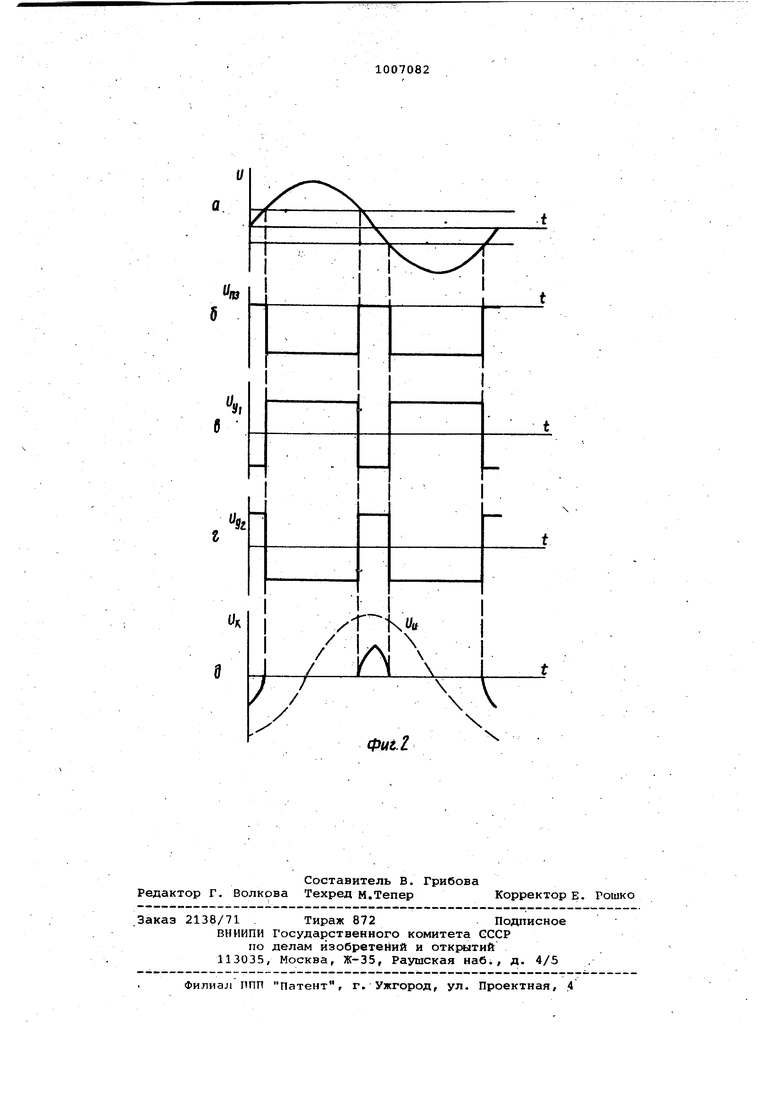
00 to Изобретение относится к области автоматичес1сого управления, а именн к следящим системам, и предназначено для управления объектами, например, в системах автоматической подстройки частоты магнетрона, требующими повьшюнного быстродействия и минимального перерегулирования. Известна система с переменной структурой, содержащая измеритель рассогласования, пропорциональный и интегральный канал 1 . Недостатками этой системы являются недостаточно высокая точность при больших рассогласованиях системы. Наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая элемент сравнения, дискриминатор, предварительный усилитель, сумматор, усилитель мощности, исполнительный двигатель и интегратор рГ . Недостатками известной системы является низкое быстродействие и большое перерегулирование при больши сигналах рассогласования из-за инерционности и насыщения интегратора. Целью изобретения является повышение динамической точности системы Поставленная цель достигается тем, что в следящую систему, содерж щую последовательно соединенные блок сравнения, дискриминатор, предварительный усилитель, сумматор, усилитель мощности, исполнительный двигатель и объект регулирования, выход которого подключен к первому входу блока сравнения, а также интегратор и пороговое устройство, входы которых подключены к выходу дискриминатора, введены два ключа и формирователь импульсов, причем выход поро гового устройства через формировател импульсов подключен к управляющим, входам ключей, сигнальные входы которых соединены с выходом генератор а выходы - соответственно со вторым входами интегратора и сумматора. . На фиг. 1 изображена структурная схема следящей системы; на фиг. 2 временные диaгpaм ъI. Следящая система содержит послед вательно соединенные элемент 1 срав нения, дискриминатор 2, предварител ный усилитель 3, сумматор 4, усилитель 5 мощности, исполнительный дви гатель 6 и объект 7 регулирования, интегратор 8, пороговый элемент 9, формирователь 10 импульсов, ключи 11 и 12. Следящая система работает следующим образом. Входной сигнал, поступает на вход элемента 1 сравнения и отрабатывается системой до момента равенства нулю сигнала рассогласования на выходе элемента сравнения. В результате выходной сигнал системы на выходе объекта 7 становится равным входному. Но в отличии от известной в предлагаемой системе интегратор 8 включается параллельно предварительному усилителю 3 не постоянно, а в зависимости .от величины напряжения сигнала рассогласования. При сигналах рассогласования, превышающих зону нечувствительности системы (уровень срабатывания порогового элемента, на выходе порогового элемента 9 вырабатывается Прямоугольный импульс, который на выходе формирователя 10 импульсов формирует импульсы для ключей 11-и 12. Под действием указанных управляющих импульсов ключ 11 размыкается, а ключ 12 замыкается. При этом выход интегратора 8 отключается от второго входа сумматора 4 и подключается к своему второму входу. Работа следящей dиcтeмы при этом происходит при низкой добротности, определяемой коэффициентом усиления безынерционного предварительного усилителя 3. В момент времени, когда сигнал рассогласования станет меньше зоны нечувствительности системы, выход интегратора 8 отключается от его второго входа и подключается.ко второму входу сумматора 4. При этом сигнал рассогласования системы уменьшается до нуля -за время, определяемое постоянной времени интегратора. Очень важно, что работа интегратора начинается при нулевых начальных условиях что обеспечивает отсутствие дополнительного перерегулирования в системе. Положительный эффект от использования предлагаемой системы, по сравнению с известной, заключается в повышении бьзстродействия cиcтe ъI в 2-3 раза и уменьшении .перерегулирования в 5-10 раз. Напредприятии выполнен макет предлагаемого устройства и проведены его лабораторные испытания. Известная следящая системы при согласовании, с угла рассогласования 180° имеет перерегулирование 100-200% и время переходного процесса 0,5-1 с. Предлагаемая следящая система имеет перерегулирование 0-20%, а время переходного процесса 0,2-0,3 с.
(/,
03
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| Следящая система | 1990 |
|
SU1829023A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Следящая система | 1977 |
|
SU661501A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |

/
Ч
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Емельянов С.В | |||
| Системы автоматического управленияс переменной структурой | |||
| Ы., Наука, 1967, с.39, 2 | |||
| Проектирование следящих систем | |||
| Под ред | |||
| Л.В | |||
| Рабиновича, м., Машиностроение, 1969, с | |||
| Приспособление для подвешивания тележки при подъемках сошедших с рельс вагонов | 1920 |
|
SU216A1 |
