1
Изобретение относится к самонастраивающимся системам, выполняющим точное регулирование скорости двигателя в широком диапазоне. Система можег найти применение в устройствах автоматики, производигельносгь которых зависит от времени протекания переходных процессов.
Известны самонастраивающиеся системы регулирования, содержащие основной контур регулирования, эталонную модель, вход которой соединен со входом системы, а выход - со входом сумматора, второй вход которого через динамическое звено соединен с выходом системы, а выход через исполнительный механизм - с управляющим входом системы , 2.
В качестве.исполнительного механизма чаще всего используется устройство с интегральной хар 1ктеристик1й.
Из известных систем наиболее близкой по технической сущности является самонастраивающаяся система регулирования скорости, содержащая задатчик, который через моаель объекта соединен с первым входом врвого сумматора и непосредственно с
первым входом второго сумматора, выход которого через формирователь сигнала упра ления соединен со входом исполнительного двигателя, выход которого через датчик скорости соединен со вторым входом первого сумматора и вторым входом второго сумматора, третий вход которого соединен с выходом интегратора 3.
Недостатком известной системы является невысокая точность при изменении параметров объекта регулирования и внешних возмущений, действующих на систему регулирования.
Целью изобретения является повышение точности и быстродействия системы.
Это достигается тем, что в системе установлены реле, третий сумматор, инвертор и инерционное звено, причем выход интегратора через инвертор и инерционное звено и непосредственно соединен с соотвв ствующими входами третьего сумматора, выход которого соединен с третьим входом третьего сумматора, выход которого через первый сумматор и реле соединен со входом интегратора.
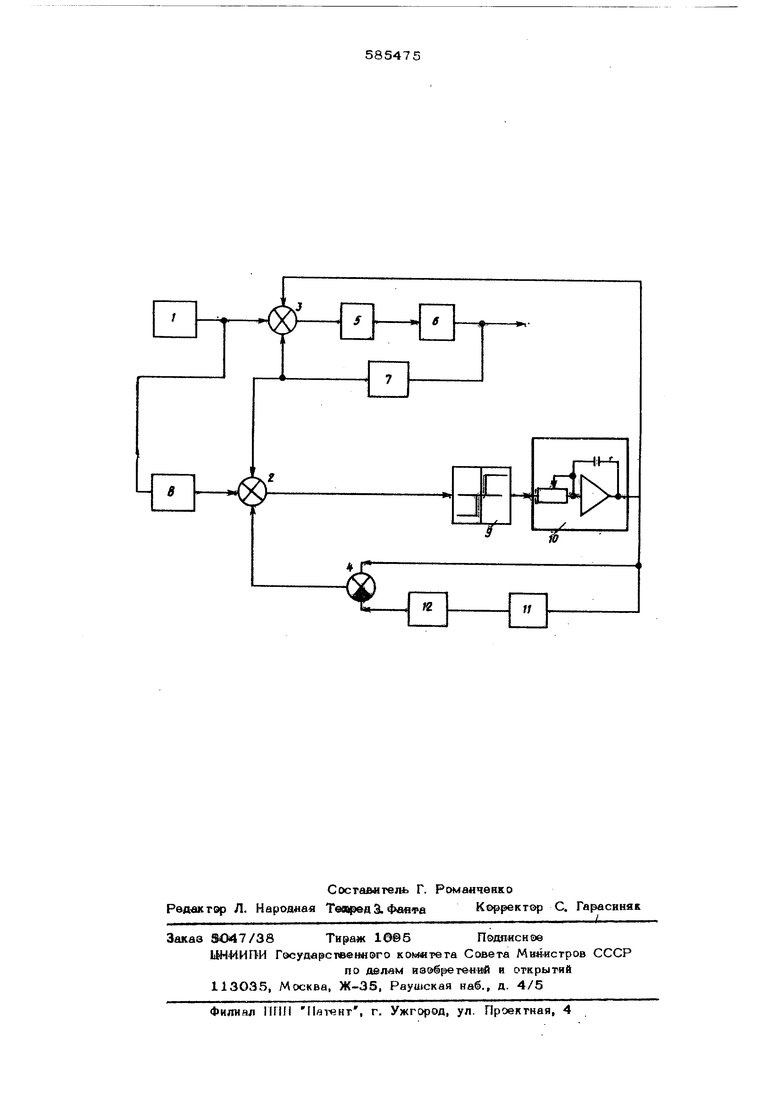
На чертеже представлена блок-схема .
Она ;одержит задагчик 1, первый-, второ н третий-сумматора 2-4, формирователь 5 сигнала управления, исполнительный двигатель 6, датчик скорости 7, модель объекта 8, реле 9, интегратор 1О, инвертор 11, инерционное звено 12.
Система работает следующим образом. На вход модели 8 поступает сигнал с выхода задатчика 1. Выходной сигнал модели 8 соогветствует -требуемому закону управления, он алгебраичоски суммируется с сигналом обратной связи по скорости в сумматоре 2. Выходной сигнал сумматопа 2 управляет работой трехпозиционного репе 9.
8соответствии с выходным сигналом реле
9интегратор 10 формирует компенсирующе воздействие, которое подается на вход сумматора 3,
Принцип действия устройства основан на следующем. Если процесс управления в системе протекает в соответствии с заданны законом управления, то сигналы на выходе модели 8 и датчика скорости 7 равны по величине и обратны по знаку. В этом случае сигнал на выходе сумматора 2 отсутствует, выходной сигнал интегратора 10 равен нулю. Контур самонастройки не влияет на работу системы.
Под действием того или иного возмущени или при изменении нагрузки на валу исполнительного дв.игателя 6 появляется сигнал на выходе сумматора 2, который вызывает срабатывание реле 9. Интегратор 10 преобразует ступенчатый сигнал с выхода реле 9 в линейный компенсирующий сигнал, который суммируется в сумматоре 3 с сигналом
оснг вного контура регулирования.
Отработка системой компенсирующего сигнала совершается с отставанием, обусловленным инерционностью всей системы. Вследствие этой инерции и малой зоны нечувствительности реле 9 в системе имеют место низкочастотные колебания относительно нулевой линии ошибки. Для устранения этих колебаний предусмотрен узел коррекции, состоящий из сумматора 4, инвертора 11 и инерционного звена 12.
Компенструюший сигнал с выхода интегра- тора 1 О и выходной ситчшл инерционного звена подаю гея с противоподожлыми знаками на вход третьего сумматора 4,сигнал с которого подается на вход реле 9 сумматора 2. При введении сигнала с выхода сумматора 4 реле 9 отключается раньше, чем сумма выходных сигналов модели 8 и датчика скорости 7 станет равной нулю.
Дальнейшее уменьи)еиие указанной сумм происходит при выключенном реле 9 Корректирующий узел обеспечивает формирование сигнала на выходе интегратора 10 необходимой величины в минимальное время без- перерегулирования.
Предлагаемая система позволит повысит точность и быстродействие регулирования по крайней мере в два раза.
Формула изобретения Самонастраивающаяся система регулирования скорости, содержащая задатчик, который через модель объекта соединен с первы входом первого сумматора и непосредственно с первым входом второго сумматора, выход которого через формирователь сигнал управления соединен со входом исполнительного двигателя, выход которого через датчик скорости соединен со вторым входом первого сумматора и вторым входом второг сумматора, третий вход которого соединен с выходом интегратора, отличающаяся тем, что, с целью повышения точности и быстродействия системы, .в ней установлены реле, третий, сумматор, инвертор и инерционное звено, причем выход интегратора через инвертор и инерционное звено и непосредственно соединен с соответствующими входами третьего сумматора, выход которого через первый сумматор и релле соединен со входом интегратора.
Источники информации, принятые во внимание при экспертизе:
1.Красовский А. А. Динамика непрерывных самонастраивающихся систем, М., Физматгиа, 1963, с. 80-81.
2.Авторское свидетельства СССР № 328433, G 05 В 17/02, 1972.
3.Санновский Е. А. и др. Самонастраивающиеся системы управления с эталонными моделями , Минск, 197О, с. 77-89.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Устройство для управления позиционным электроприводом | 1977 |
|
SU714352A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
h
