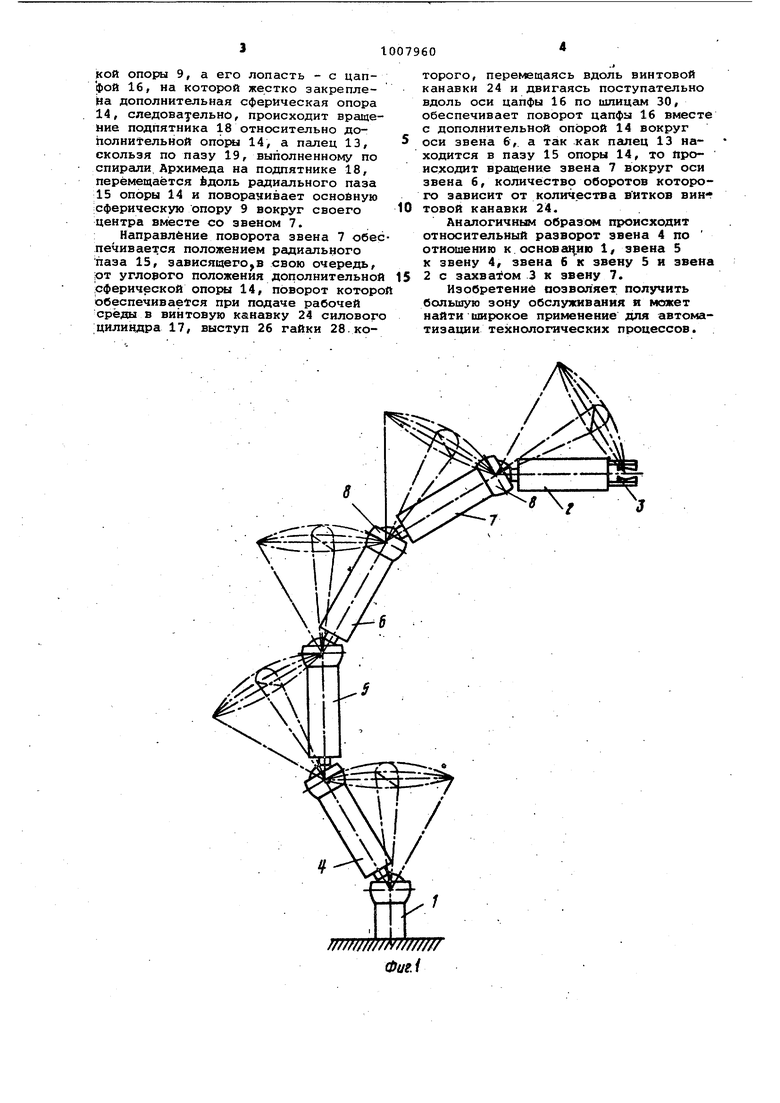
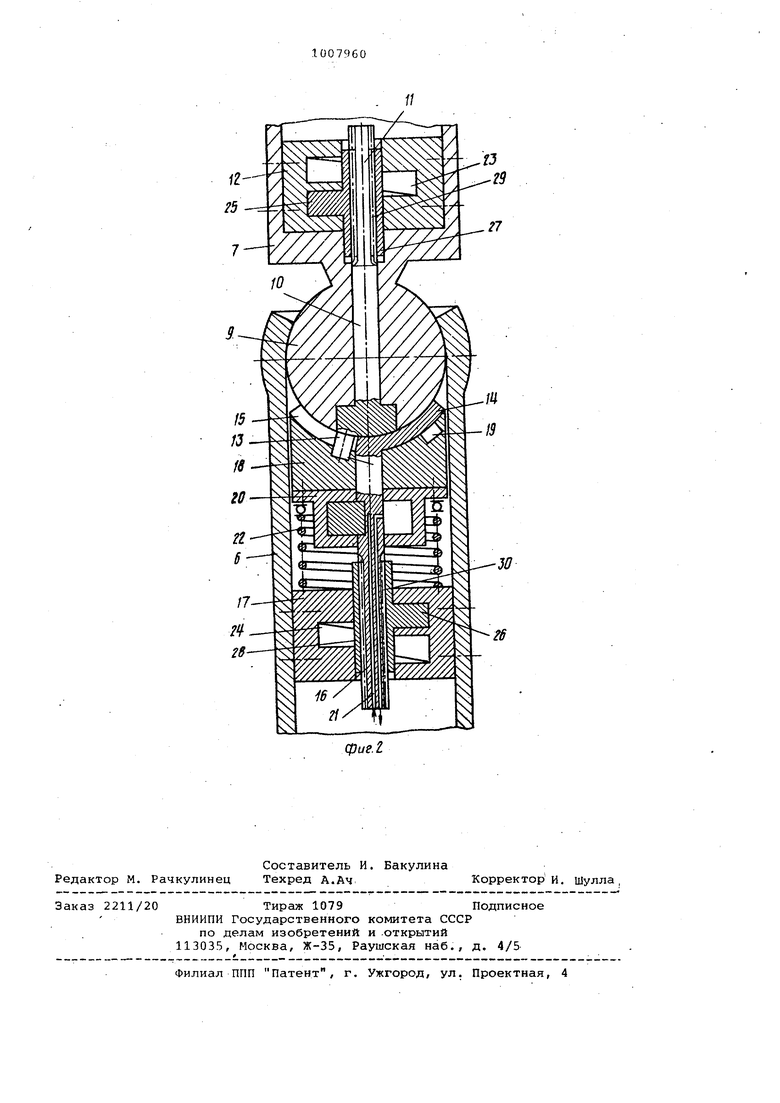
Изобретение относится к машиностроению и может быть использовано при создании и разработке средств . автоматизации технологических процессов и складских работ. Изестен манипулятор, содержащий основание, промежуточные звенья и концевое звено, несущее захватное устройство, причем звенья связаны между собой основными сферическими опорами с подпятниками, а также сил вые цилиндры, штоки которых жестко связаны с подпятникс1ми Ij . Однако данный манипулятор имеет ограниченную зону обслуживания. Цель изобретения - расширение во ны обслуживания. Поставленная цель достигается те JiTo м анипулятор, содержащий основан промезкуточные звенья и концевое зве но, несущее захватное устройство, примем звенья связаны между собой основными сферическими опорами с подпятниками, а также силовые цилиндры, штоки которых жестко связаны с подпятниками, снабхсен допелнительными сферическими опорами с цапфами, кинематически связанными с подпятниками основных сферических опор, и винтовыми парами, число которых соответствует числу звеньев причем винт в каждой винтовой паре имеет головку со смещенным относительно оси пальцем, а в .дополнитель ных сферических опорах выполнен радиальный паз, в котором размещен указанный палец, при этом в подпятн ке основной сферической опоры выпол нен паз под этот палец винтовой пары а гайка этой пары имеет на направляющей поверхности выступ, кроме того, в поршне силового цилиндра выполнена винтовая канавка, в которой расположен выступ г.айки винтог вой пары. , Кроме того, паз подпятника основ ной сферической опоры выполнен в ви дё спирали Архимеда. При этом в цапфе дополнительной сферической опоры выполнены сквозные каналы,, например, для подвода энергоносителя. На фиг. 1 изображен предлагаемый манипулятор, общий вид} на фиг. 2 осевой разрез сферической опоры звеньев. Манипулятор содержит основание 1 фиг. 1) , концевое звено 2, захватное устройство 3 и промежуточйые звенья 4-7, связанные межд собой сферическими опорами 8. Каждая сферическая опора 8 содержит основную сферическую опору 9 (фих;. 2), во внутренней полости кот рой установлен винт 10 винтовой пар 11, выполняющий роль штока силового цилиндра 12, на .конце которого имеется головка со смещенным относительно оси пальцем.13. В дополнительной сферической опоре 14 выполнен, радиальный паз 15. Дополнительная сферическая опора 14 жестко связана с цапфой 16, установленной в силовом цилиндре 17. . Подпятник 18 основнрй сферической опоры с пазом 19,.выполненным по спирали Архимеда, , установленный соlocHO дополнительной сферической опоре- 14 и связанный с цапфой 16 силового цилиндра 17 через силовой цилиндр 20, каналы21 подвода энергоносителя выполнены в цапфе 16. Дополнительная сферическая опора 14 и подпятник 18 подпружинены в сторону основной сферической опоры |9 с помощью пружины 22, а их пазы Д5 и 19 взаимодействуют с пальцем 13. В поршнях силовых цилиндров 12 и 17 рабочие полости выполнены в виде винтовых канавок 23 и 24, взаимодействующих с выступами 25 и 26, распо| 1оженными на направляющих поверх ностях гаек 27 и 28 винтовых пар, скользящих в осевом направлении по шлицевым направляющим 29 и 30 винта 10 винтовой пары 11 и цапфы 16. Манипулятор работает следующим образ.ом. Сферическая опора 8, соединяющая два соседних звена 4 и 5, 6 и 5, ей 7, 7 и 2 или основание 1 и звено 4, обеспечивает вращение кахадого последующего звена вокруг оси предыдущего, поворот вокруг осзи, перпендикулярной осям обоих звеньев, а также вращение этого звена вокруг его собственной оси. Так, например, вращение звена 7 (фиг. 2) относительно своей оси осуществляется при подаче энергоносителя в винтовую канавку 23 силового цилиндра 12, при этом выступ 25, двигаясь вдоль винтовой канавки 23, перемещается вместе с гайкой 27 по шлицевым на правляющим 29 вдоль винта 10 и одновременно вращается относительно корпуса силового цилиндра 12, а так как на конце винта 10 имеется головка со смещенным относительно оси пальцем 13, который входит в радиальный паз 15 дополнительной сферической опоры 14, неподвижной в данный момент, то и винт 10 в данный момент неподвижен, а следователв но, поворачивается корпус силового цилиндра 12 со звеном 7 вокруг своей оси. Поворот звена 7 вокруг оси, пер« пендикулярной осям обоих звеньев 7 и 6, т.е. качание звена 7 относительно центра основной сферической опоры 9, обеспечивается при подаче рабочей -среды в силовой цилиндр 20, а так как его корпус жестко связан с подпятником 18 основной сферической опоры 9, а его лопасть - с цапipoft 16, на которой жестко закреплеЙа дополнительная сферическая опора 14, следовательно, происходит вращение подпятника 18 относительно дополнительной опоры 14, а палец 13, скользя по пазу 19, выполненному по спирали Архимеда на подпятнике 18, перемещается доль радиального паза 15 опоры 14 и поворачивает основную сферическую опору 9 вокруг своего центра вместе со звеном 7.
Направление поворота звена 7 обеспечивается положением радиального паза 15, зависящего в свою очередь, рт углового положения дополнительной сферической опоры 14, поворот которо обеспечивается при подаче рабочей среды в винтовую канавку 24 силового цилиндра 17, выступ 26 гайки 28.которого, перемещаясь вдоль винтовой канавки 24 и двигаясь поступательно вдоль оси цапфы 16 по ишицгм 30, обеспечивает поворот цапфы 16 вместе с дополнительной опорой 14 вокруг оси звена 6, а так как палец 13 находится в пазу 15 опоры 14, то Происходит вращение звена 7 вокруг оси звена 6, количество оборотов которого зависит от количества витков вин
0 товой канавки 24.
Аналогичным образ(мл происходит относительный разворот звена 4 по отношению к основа1 ию 1/ звена 5 к звену 4, звена 6 к звену 5 и звена
5 2с захватом 3 к звену 7.
Изобретение позволяет получить большую зону обслуживания я может найти широкое применение для автоматизации технологических процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU960006A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| Устройство для обработки деталей со сферическими поверхностями | 1981 |
|
SU1006172A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБОРУДОВАНИЯ | 2002 |
|
RU2210527C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБОРУДОВАНИЯ | 2005 |
|
RU2283271C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
1. МАНИПУЛЯТОР, содержащий основание, промажут.очные звенья и концевое звено, несущее захватное устройство, причем звенья, связаны между собой основными сферическими опорами с подпятниками, а также силовые цилиндры, штоки которых жестко связаны с подпятниками, отличающийся тем, что, с целью расширения зоны обслуживания, он снабжен дополнительными сферическими опорами с цапфами, кинематически связанными с подпятниками основных сферических опор, и винтовьп ш парами, число которых соответствует числу звеньев, причем винт в каждой винтовой паре имеет головку со смещенным относительно оси пальцем, а в дополнительных сферических опорах выполнен радиальный паз, в котором размещен указанный палец, при этом в подпятнике основной сферической опоры выполнен паз под этот палец винтовой пары, а гайка этой пары на направляющей поверхности, выступ, кроме того, в поршне силового цилиндра выполнена винтовая канавка, в которой расположен выс.тгп гайки винтовой пары. е 2.Манипулятор по п. 1, отли(Л чающийся тем, что паз подпятника основной сферической выполнен в виде спирали Архимеда. 3.Манипулятор по п. 1, отличающийся тем, что в цапфе дополнительной сферической опоры выполнены сквозные каналы, например, для подвода-энергоносителя. « СП)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1976 |
|
SU573340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
