силового цилиндра 6, производится фиксированным поворотом Б 4 с П 3 в корпусе 1 захватной головки. На штоке 7 и оси 8 силового цилиндра 6,- эафиксированных от поворота с Б 4, закреплены кулачки 18, при взаимодействии с которыми ЗР 11 выдвигаются от оси Б 4 при перемещении на рабочую позицию. Захват детали ЗР 11 осуществляется сближением П 5 пружинами 22, а разведение П 5 с ЗР 11 - силовым цилиндром 6, Б 4 вращается выдвижением зубчатой рейки из цилиндра двух- позиционного поршневого поворотного
1
Изобретение относится к машиностроению, а именно к конструкциям захватных органов промышленных роботов и манипуляторов, и может быть использовано для захвата и манипулирования деталями различных типоразмеров в быстропереналаживаемых роботизированных многономенклатурных линиях.
Цель изобретения - расширение технологических возможностей за счет повышения- жесткости и уменьшения продольных габаритов головки, обеспечения возможности выдвижения захватных устройств на рабочую позицию.
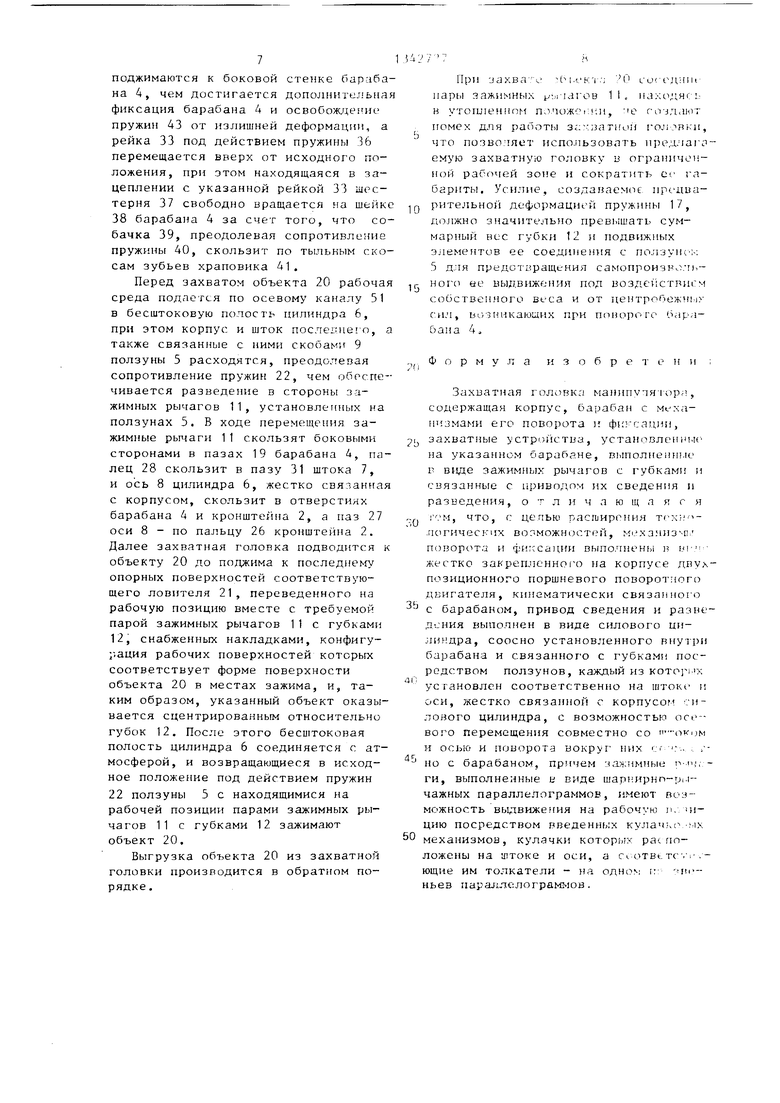
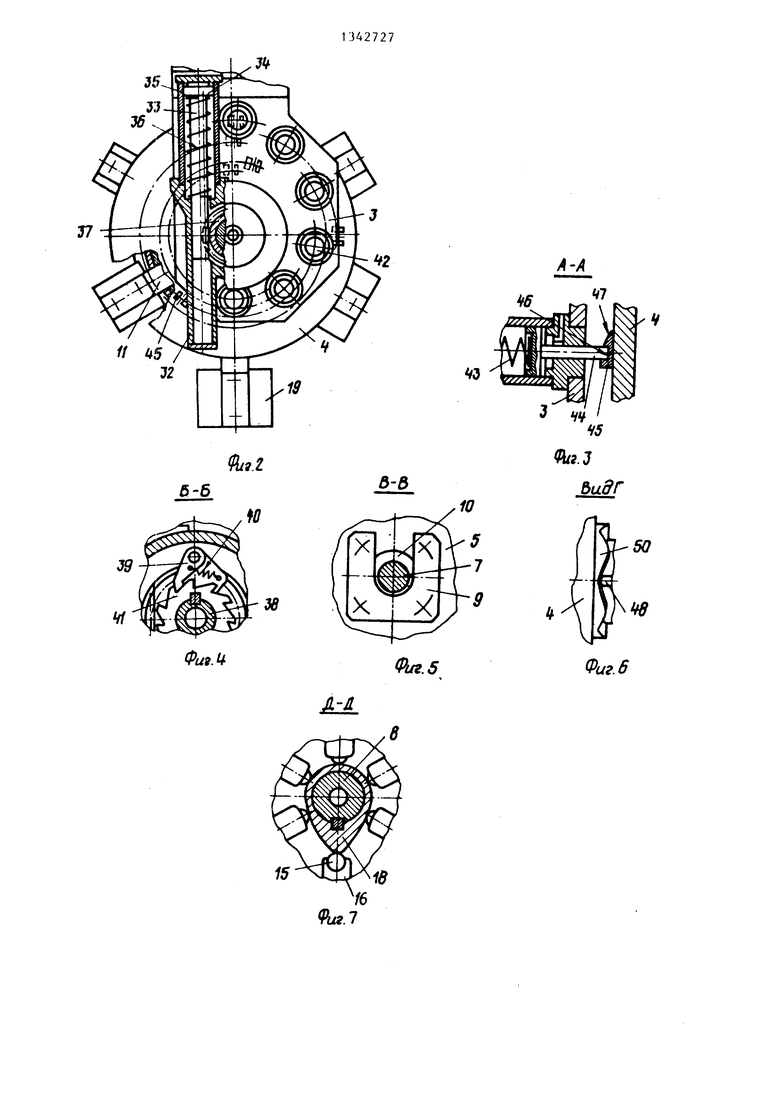
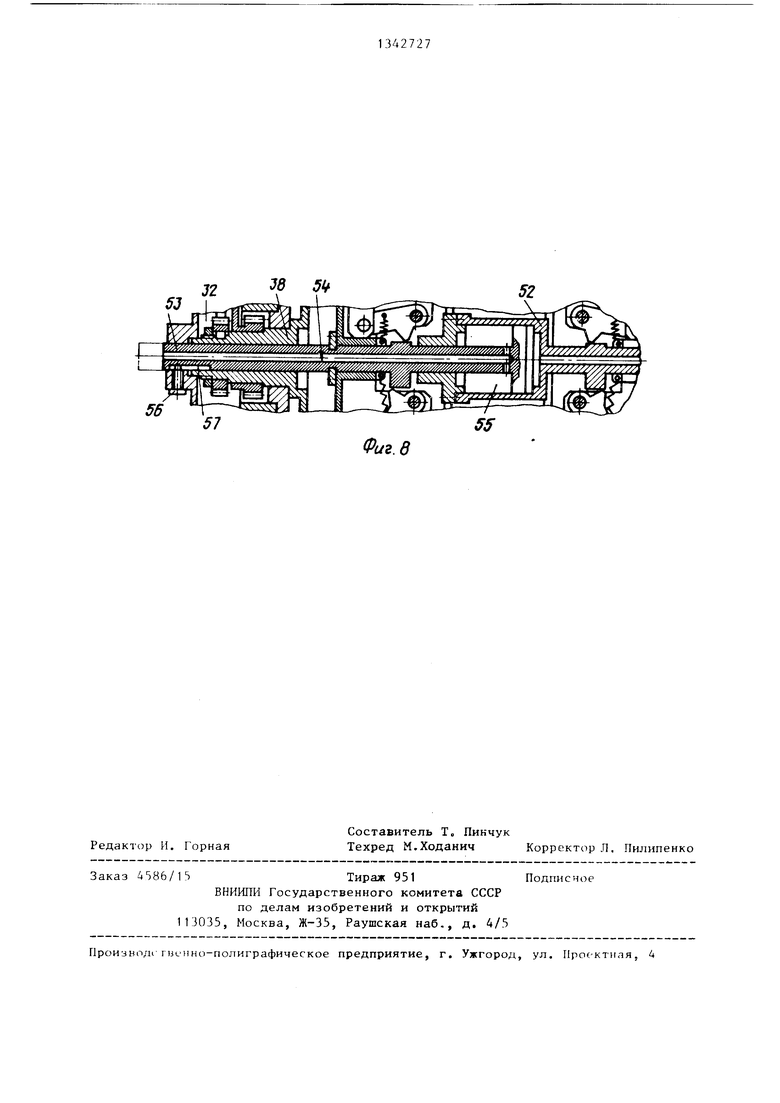
На фиг. 1 изображена предлагаемая захватная головка, общий вид; на фиг. 2 - то же,вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 1; на фиг. 6 - вид Г на фиг. 1; на фиг. 7 - разрез Д-Д на фиг. 1; на фиг. 8 - пример выполнения привода сведения и разведения губок.
Захватная головка содержит корпус 1, на кронштейнах 2 и 3 которого установлен с возможностью вращения барабан 4, Внутри него соосно установлены ползуны 5 и силовой цилиндр 6 одностороннего действия, причем его шток 7 связан с одним, а ось 8, жестко соединенная с корпусом силового цилиндра 6 - с другим из ползунов 5 посредством скоб 9, жестко с ними соединенными указанными ползунами и
двигате.чя 32, вращающей надетую на шейку 38 Б 4 шестерню 37, которая воздействует собачкой 39 на храповик 41, закрепленный на шейке 38 Б 4 Фиксация Б 4 на заданной позиции осуществляется взаимодействием одного из штырей 44 с соответствующим упором 45, которые соответствуют требуемой позиции Б 4. Затем рейка возвращается в исходное положение пружиной, при этом собачка 39 вращающейся по шейке 38 Б 4 в обратную сторонушестерни 37 проскальзывает по зубьям храповика 41. 8 ил.
взаимодействующими с проточками 10 указанных штока 7 и оси 8.
В радиальных пазах ползунов 5 размещены зажимные рычаги 11 с губками 12, каждый из которых шарнирно связан с ползуном 5 посредством двух звеньев 13 и 14, образующих с ними рычажно-шарнирный параллелограмм.
Каждое из звеньев 13 снабжено контактным элементом, выполненным в виде
шарика 15, установленного с возможностью вращения в гнезде толкателя 16 звена 13, и соединено с одним концом витой пружины 17 растяжения, другим концом установленной на ползуне
5, так, что указанный шарик 15 находится в постоянном принудительном контакте с профилированной поверхностью одного из двух кулачков 18, первый из которых жестко закреплен
на штоке 7, а другой - на оси 8,
жестко связанной с корпусом силового цилиндра 6. Периферийные части зажимных рычагов 11, несущие губки 12, выходят за наружную поверхность барабана 4 через продольные пазы 19 последнего и снабжены жестко закрепленными сменными накладками губок 12 для захвата объектов 20 различных размеров и конфигурации. Ширина
радиальных пазов ползунов 3 и продольных пазов 19 барабана 4 равна ширине губок 12, что предотвращает проворачивание ползунов 5 в барабане 4. На наружной поверхности последнего между зажимными рычагами 11 проти3
воположных ползунов 5, образующими захватное устройство, жестко установлены ловители 21 для центрирования объектов 20 относительно соответствующих губок 12. Ползуны 5 связаны между собой витыми пружинами 22 растяжения, размещенными между ловителями 21 и вдетым концами в отверстия регулировочных винтов 23, ввернутых в ползуны 5 напротив прорезей 24 барабана 4 и законтренных гайками 25.
Палец 26, установленный на кронштейне 2 корпуса 1, взаимодействует с пазом 27 оси 8, жестко соединенной с корпусом силового цилиндра 6, для предотвращения поворота последнего в корпусе 1. Палец 28 крышки 29 силового цилиндра 6, зафиксированной от проворота в корпусе пальцем 30, взаимодействует с пазом 31 штока 7 для предотвращения проворота последнего относительно корпуса силового цилиндра 6.
На кронштейне 3 жестко закреплен двухпозиционный поршневой поворотный двигатель 32, содержащий зубчатую рейку 33 на штоке, жестко связанном с поршнем 34 цилиндра 35, и витую пружину 36 сжатия в штоковой полости указанного цилиндра 35, рейка 33 находится в зацеплении с шестерней 37, установленной с возможностью вращения на цилиндрической щейке 38 барабана 4, и собачкой 39 с витой пружиной 40 растяжения, взаимодействующей с храповиком 41, жестко закрепленным
на шейке 38.
I
На кронштейне 3 на различных расстояниях от оси вращения барабана 4 закреплены рабочие цилиндры 42 одностороннего действия с витыми пружинами 43 сжатия в бесштоковьгх полостях и штоками, выполненными в виде выдвижных штырей 44, обращенных к боковой стенке барабана 4, на которой жестко установлены упоры 45, каждый из которых снабжен пазом 46 с возможностью размещения в нем конца штыря 44 и скосом 47. Количество упоров 45 соответствует количеству рабочих цилиндров 42 и равно числу пар зажимных рычагов 11 барабана 4, радиальное расположение упоров 45 соответствует радиальному расположению штьфей 44, а взаимное угловое расположение упоров 45 и штырей 44 обеспечивает при их взаимодействии фиксацию барабана 4 в положениях, соот5
42727л
ветствующих ус танонке каждо1 1 ич пар зажимных рычагов 11 на рабочей позиции, характеризуюшеГюя наибольшим выдвиже} ием последних из пазои 19 барабана 4, имеющим место при взаимодействии шариков 15 соответствующей пары зажимных рычагов 11 с зоной наибольшего радиуса профилированных поQ верхностей кулачков 18. На кронштейне 2 смонтирован дополнительный штырь 48, поджатый пружиной 49 к закрепленному на боковой стенке барабана 4 торцовому кулачку 50 с впадинами на
15 профилированной поверхности, соответствующими фиксированным положениям барабана 4. Для подвода рабочей среды в бесштоковую полость силового цилиндра 6 в оси 8, проходящей
Q сквозь отверстие кронштейна 2, выполнен осевой канал 51.
Вместо указанного силового цилиндра 6 пружин 22 в головке может быть применен силовой цилиндр 52 двухстороннего действия с проходящим сквозь отверстия шейки 38 барабана 4 и крышки корпуса двухпозиционного поршневого поворотного двигателя 32 удлиненным штоком 53 с осевым отверстием 54 для подвода рабочей среды в што- ковую полость 55 силового цилиндра 52. фиксация штока 53 от проворота при этом производится установленным На крьш1ке пальцем 56, взаимодейству- 5 ющим с пазом 57 штока, без использования пальцев 28 и 30.
Захватная головка работает следующим образом.
В исходном положении бесштоковые 0 полости силового цилиндра 6 и цилиндра двухпозиционного поршневого поворотного двигателя 32, а также што- ковые полости рабочих цилиндров 42 соединены с атмосферой. При этом 5 под действием пружин 22 ползуны 5 приближены один к другому до упора торцами в бурты на внутренней поверхности барабана 4, а шток 7 втянут в силовой цилиндр 6. Зубчатая рейка 33 0 под действием пружины 36 занимает крайнее верхнее положение. Штыри 44 рабочих цилиндров 42 под действием пружин 43 выдвигаются до контакта с боковой стенкой барабана 4, при 5 этом один из штырей 44 располагается в пазу 46 одного из упоров 45, фиксируя положение барабана 4, при котором пара зажимных рычагов 11, соответствующая указанной изаимодей
5Г
c luyiomeii ii.ipe штырь - упор, иаходит- чп на рабочей (нижней) псгзиции. До- полнителbin.u i иггырь 48 пружиной 49 поджат к профилированной поверхности кулачка 30, чанимая место в oAHoii из впадин последней. Пара зажимных рыча гон 11, находящаяся на рабочей позиции, максимально выдвинута на оси барабана 4 за счет взаимодействия шариков 15 звеньев 13 данной пары с зоной максимального радиуса профилированной поверхности кулачков 18. При этом осуществляется принудительный контакт шариков 15 с профилиро- ванной поверхностью кулачков 18 под воздействием пружин 17,
При смене номенклатуры захватываемых об1 ектов 20 перевод на рабочую позицию требуемой пары зажимных рычагов 11 осуществляется фиксированным поворотом 6apa6a)ia 4, При этом рабочая среда подается в штоковые полости всех цилиндров 42, кроме цилиндров, взаимодействие штыря 44 которых с соответс твующим упором 45 обеспечивает фИ1-:сацию на рабочей позиции требуемой пары зажимных рычагов 11, штыри указанных цилиндров 42, в том числе и ци.чиндра, штырь которого пер ионачально находился в зацеплении с упором, вдвигаются, сжимая пружины 43, и Г)ара6ан 4, удерживаемый от произвольных вращений в данный момен ::н1пь дополнительным и1тырем 48, получает нозм11жность для последующего по ворота, К ::)торый осуществляется подачей среды в бесштоковую полость ци- .линдра 35 доухпозиционног о поршневого поворотного двигателя 32. Это вызывает перемещение вниз рейки 33, жестко связанной с поршнем 34, сжимающим при этом пружину 36, и поворот находящейся в зацеплении с указанной рейкой шестерни 3/. Связанная с последней с.обачка 39, воздеГ Ствует на зуб храповика 41, жестко закрепленного на шейке 38 барабана 4, поворачивает последний и отверстиях крон111теЙ1-ов 2 и 3. При этом вьщвину- тый штырь 44 цилиндра 42, штоковой полостью соединенного с атмосферой, скользя торцом по боковой стенке вращающегося барабана 4, набегает на ск(эс 47 соответствующего упора 45, сжимая пружину 43, и заскакивает под действием последней в паз 46 указанного упора, вследствие чего дальнейшее перемещение рейки 33 и вращение
0
20
27
|-
g 35 55
:ю
40
27б
барабана 4 прекращаются и, таким образом, требуемая пара зажимных рычагов 11 окапывается зафиксированной на рабочей позиции.
Проворот ползунов 5, несущих зажимные рычаги 11 относительно барабана 4 при вращении последнего, отсутствует, так как ширина продольных пазов 19 барабана равна ширине проходящих через последние зажимных рычагов 11, при этом ширина радиальных пазов ползунов 5, в которых размещены указанные зажимные рычаги, также равна ширине последних, В процессе вращения барабана 4 шарики 15 звеньев 13 прокатываются по профилированной поверхности кулачков 18, удерживаемых от совме-стного вращения с барабаном 4, за счет фиксации пальцами 26, 28 я 30 от указанного вращения оси В и штока 7, на которых жестко закрепле)п„ указанные кулачки. При этом пара зажимных рычагов 11, перемещаемая на рабочую позицию, выдвигается от оси барабана 4 на величину, обеспечивающую требуемое для захвата объекта 20 положение накладок губок 12 за счет )1абегания шариков 15 звеньев 13 данной пары зажимньж рычагов 11 на зону максимального радиуса профилированной поверхности кулачков 18.
Соединение зажимных рычагов 11 с ползунами 5 звеньями 13 и 14, обра- зующи.ми рычажно-шарнирный параллело- rptiMM, позволяет за счС Т небольшого перепада радиуса профилированной поверхности кулачков 18 добиться значительных величин выдвижений зажимных рычагов 11 при сохранении взаимной параллельности последних. Кроме того, в процессе вращения барабана 4 происходит поворот скоб 9 ползунов 5, вращающихся совместно с барабаном 4, в проточках 10 неподвижных ци;п1ндра 6 и его штока 7, а также перемещение подпружиненного штыря 48 по профилированной поверхности торцовог-о кулачка 50, вращающегося с барабаном ., и последующее его западаиис во впадину на последней, соотретствуивдум новому фиксированному полож гь.ю барабана 4. После jToro птоковые полости остальных цилиндров 42 и б;;сшто- ковая полость цилиндра 35 л ухиозиHHOHHOI O nOpllllieBOS O n.,-.B.)pt I HC I O
гателя 32 соединяи/гск ( ат.-ir, ферой, штыри 44 под действием пружин 43
7
поджимаются к боковой стетже барабана 4, чем достигается дополнительна фиксация барабана 4 и освобож/деиие пружин 43 от излишней деформации, а рейка 33 под действием пружины 36 перемещается вверх от исходного положения, при этом находящаяся в зацеплении с указанной рейкой 33 шестерня 37 свободно вращается на шейк 38 барабана 4 за счет того, что собачка 39, преодолевая сопротивление пружины 40, скользит по тыльным скосам зубьев храповика 41.
Перед захватом объекта 20 рабочая среда подлетел по осевому каналу 51 в бесштоковую полость цилиндра 6, при этом корпус и шток послекиего, а также связанные с ними скобами 9 ползуны 5 расходятся, преодолевая сопротивление пружин 22, чем обеспечивается разведение в стороны зажимных рычагов 11, установленных на ползунах 5. В ходе перемещения зажимные рычаги 11 скользят боковыми сторонами в пазах 19 барабана 4, палец 28 скользит в пазу 31 штока 7, и ось 8 цилиндра 6, жестка связанная с корпусом, скользит в отверстиях барабана 4 и кронштейна 2, а паз 27 оси 8 - по пальцу 26 кронштейна 2. Далее захватная головка подводится к объекту 20 до поджима к пocлeднe ry опорных поверхностей соответствующего ловителя 21, переведенного на рабочую позицию вместе с требуемой парой зажимных рычагов 11 с губками 12, снабженных накладками, конфигу- ;-.ация рабочих поверхностей которых соответствует форме поверхности объекта 20 в местах зажима, и, таким образом, указанный объект оказывается сцентрированным относительно губок 12. После этого бесштоковая полость цилиндра 6 соединяется с атмосферой, и возвращающиеся в исходное положение под действием пружин 22 ползуны 5 с находящимися на рабочей позиции парами зажимных рычагов 11 с губками 12 зажимают объект 20,
Выгрузка объекта 20 из захватной головки производится в обратном порядке.
При захва- ч- ч :.CK I ,-J О пары зажимных у.ячагов 11. находяс i.- в утогшеннп.и по,пожег; ;и, е гоз.члмт помех для работы з;;--иати1 1И , что позволяет использовать нредлаг т- емую захватную головку и ограниченной рабочей зоне и сократить ev габариты. Усилие, создаваемое iipt aBa- рительно деформацией пружины 17, значительно прев1.1шать суммарный вес губки 12 и подвижных элементов ее соединения с ползунсм 5 для предот1 ращения самопроизро.т).- ного ее выдвижения под воздеГ ст1Пи:м собственного веса и от центробежных с.ил, возникающих при понорогс барабана 4
Ф о р М у ,17
И 3 О б р е т е н и
Ь
0
5
0
Захватная голс. манипутяnip;, содержащая корпус, бараба 1 с м.:-:а- низмами его поворота и фи сации, захватные ycTpoiicTBa, установленные на указанном барабане, В1лполненн1.е V. ввде зажимных рычагов с губками и связанные с приводом их сведения и разведения, отличающаяся . М, что, с целью ряс11ирени 1 тсх);- - логическчх возможностей, М1- ха;1ИЗ -П: поворсчта и фи;гса)1;ии выполнены н жестко закрепленно1 о на корпусе двух- позиционного поршневого поворотного двигателя, кинематически связан iioro с барабаном, привод сведения и разве- д-.:ния выполнен в виде силового ци- , соосно установленного внутри барабана и связанного с губками посредством ползунов, каждый из KOToi i x установлен соответственно на штокг и оси, жестко связанной с корпусоп силового цилиндра, с возможностью осе-- вого перемещения совместно со п -(-)ким и осью и поворота вокруг них Ci- .-.. , . - но с барабаном, причем за ;имные п-п;, - ги, выполненные е виде шарр.ирнп-р.-- чажных параллелограммов, имеют возможность выдвижения на рабочую и,, Ч1- цию посредством введеннр ;х кулачк(Х ;.1х механизмов, кулачки которьгх расположены на штоке и оси, а ri (TBt TC . I .- ющие им толкатели - одном ;;: чис- ньев парал.лелограм2 1ов.
36
Фиг.и
Фиг.5
Фиг. 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство для формированияиздЕлий "МюзлЕ | 1977 |
|
SU816637A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Механизм для открывания и закрывания откидной крышки ящика | 1985 |
|
SU1339050A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Устройство для сборки под сварку бандажей с обечайками | 1989 |
|
SU1699751A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
Изобретение относится к машиностроению, а именно к конструкциям захватных органов промьшшенных робо32 3 5 f 45 J(9 37 46 15 11 тов и манипуляторов. Цель - расширение технологических возможностей за счет повышения жесткости и уменьшения продольных габаритов головки, обеспечения возможности выдвижения захватных устройств на рабочую позицию. Установка на рабочей позиции требуемой пары зажимных рычагов (ЗР) 11, смонтированных на установленных в барабане (Б) 4 и связанных пружинами 22 ползунах (П) 5, один из которых соединен со штоком 7,а другой - с осью 8, жестко связанной с корпусом (Л со ьо ю 25 23 51X29 Фи г.1
15
32
36 5tf
56
Редактор И. Горная
586/13
Тираж 951 ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производ гнеино-полиграфическое предприятие, г. Ужгород, ул. Просктнля, 4
Фиг. в
Составитель То Пикчук
Техред М.Ходанич Корректор Л, Пилипенко
Подписное
| Механическая головка к манипулятору | 1979 |
|
SU860999A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
