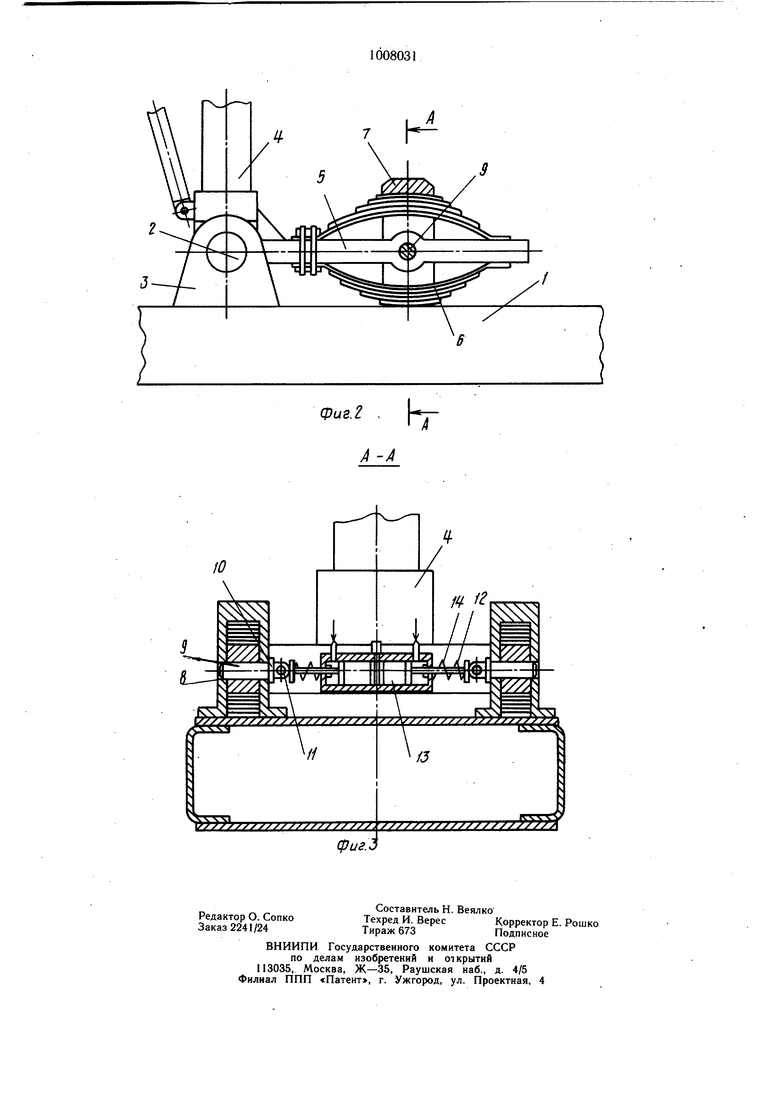
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при установке грузоподъемного механизма, например гидроманипулятора на транспортные средства. Известны гидравлические манипуляторы с клещевым захватом, жестко закрепленные на раме, стрела которых выполнена в виде выдвижных балок 1. Недостатком известных гидрвлических манипуляторов является наличие значительных динамических нагрузок, действующих на раму транспортного средства, из-за жесткого прикрепления их к раме. Известны гидравлические манипуляторы, включающие стрелу, телескопическую рукоять, установленные при помощи опорно-поворотного устройства на раме транспортного средства 2. Однако указанный гидравлический манипулятор характеризуется низкой надежностью в работе. Известно и другое устройство для установки грузоподъемного механизма на раме транспортного средства, содержащее размещенную на раме транспортного средства с возможностью вращения колонну 3. При движении ходовая часть транспотного средства испытывает значительные динамические нагрузки в месте крепления грузоподъемного механизма от воздействия микронеровностей дороги. Вследствие наличия грузоподъемного механизма изменяется развеска по осям транспортного средства, что приводит к ухудшению плавности хода. Поэтому резко снижается надежность и долговечность узлов ходовой части транспортного средства. Цель изобретения - повышение надежности и долговечности транспортного средства путем снижения динамических нагрузок на раму. Поставленная цель достигается тем, что устройство для установки грузоподъемного механизма на раме транспортного средства, содержащее размещенную на раме транспортного средства с возможностью вращения колонну, снабжено установленными на раме кронштейнами с отверстиями, сквозь которые пропущена ось, пневмокамерами, оборудованными щтоками с щарнирно прикрепленными к ним подпружиненными стопорными пальцами, имеющими буртики, П-образными кронштейна ми, амортизирующими элементами и прикрепленными к нижней части колонны поворотными в продольных вертикальных плоскостях рычагами, при этом колонна установлена на оси опорных кроищтейнов с возможностью поворота в продольной вертикальной плоскости, амортизирующие элементы расположены вдоль рычагов между поперечинами П-образных кронштейнов и рамой, а в рычагах и в стойках П-образных кронштейнов выполнены отверстия под стопорные пальцы. На фиг. 1 изображено транспортное средство с грузоподъемным механизмом, общий вид; на фиг. 2 - устройство для установки грузоподъемного механизма; на фиг. 3 - разрез А-А на фиг. 2. На раме 1 транспортного средства при помощи несущей оси 2 и опорных кронштейнов 3 шарнирно закреплена опорноповоротная колонна 4. В нижней части колонна жестко соединена с поворотными рычагами 5. По продольной оси рычагов установлены амортизирующие элементы б, которые взаимодействуют с рамой 1 и П-образными кронштейнами 7. В Побразных кронштейнах 7 и поворотных рычагах 5 выполнены отверстия 8, в которых расположены стопорные пальцы 9 с буртиками 10. Пальцы 9 через шарниры 11 соединены со штоками 12 пневмокамер 13. На штоке 12 между пальцами 9 и пневмокамерой 13 расположены пружины 14. На опорно-поворотной колонне 4 шарнирно закреплена стрела 15, в передней части которой установлена рукоять 16 с грейферным захватом 17. Привод рукояти осуществляется от гидроцилиндра 18. Захват 17 опирается на опорный кронщтейн 19 с амортизирующей прокладкой 20, которые установлены в передней части транспортного средства. Грузоподъемный механизм работает следующим образом. В рабочем положении стопорные пальцы 9 расположены в отверстиях 8 и исключают взаимное перемещение поворотного рычага 5 относительно П-образных кронштейнов 7 и рамы -1, что обеспечивает необходи.мую жесткость при работе механизма. В транспортном положении сжатый воздух от тормозной системы (не показано) подается в пневмокамеру 13, под действием чего штоки 12 перемещаются и вытягивают стопорные пальцы 9 из отверстий 8, расстопаривая поворотные рычаги 5. В процессе движения транспортного средства, при торможении, разгоне на повороте грузоподъемный механизм от действия динамических нагрузок совершает колебания относительно несущей оси 2. Эти колебания гасятся амортизирующими элементами 6, выполненными, например, в виде эллиптических рессор. Для снижения динамических нагрузок от воздействия захвата 17 и рукояти 16 в передней части транспортного средства установлен кронщтейн 19 с аморг г п о f тг . lO / тизирующей прок тадкой 20. Предлагаемое устройство снизит динамические нагрузки на раму транспортного средства на 30-40%, что позволит исклю перераспределение нагрузки по осям и в 1,2-1,3 раза повысить надежность и долговечность узлов ходовой части транспортного средства.
Фие.г UlI K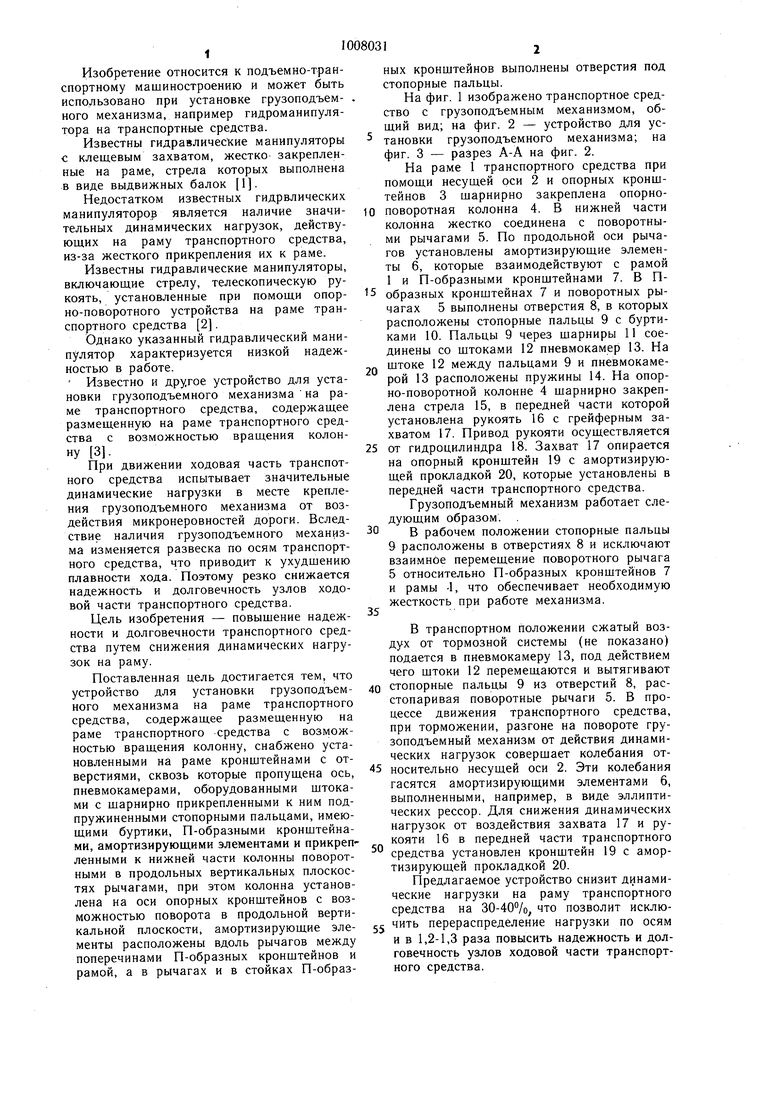
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2124470C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| КОНСОЛЬНЫЙ ПОВОРОТНЫЙ КРАН, УСТАНОВЛЕННЫЙ НА БОРТОВУЮ ПЛАТФОРМУ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2429982C1 |
УСТРОЙСТВО ДЛЯ УСТАНОВКИ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА НА РАМЕ ТРАНСПОРТНОГО СРЕДСТВА, содержащее размещенную на раме транспортного средства с возможностью вращения колонну, отличающееся тем, что, с целью повыщения надежности и долговечности транспортного средства путем снижения динамических нагрузок на раму, оно снабжено установленными на раме кронштейнами с отверстиями, сквозь которые пропущена ось, пневмокамерами, оборудованными штоками с шарнирно прикрепленными к ним подпружиненными стопорными пальцами, имеющими буртики, П-образными кронштейнами, амортизующими элементами и прикрепленными к нижней части колонны поворотными в продольных вертикальных плоскостях рычагами, при этом колонна установлена на оси опорных кронштейнов с возможностью поворота в продольной вертикальной плоскости, амортиС S зирующие элементы расположены вдоль рь1чагов между поперечинами П-образных (Л кронштейнов и рамой, а в рычагах и в стойках П-образных кронштейнов выполнены отверстия под стопорные пальцы. 00 о оо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зарубежные манипуляторы для погрузки древесины | |||
| Обзорная информация, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., 1975, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Журнал «Laspolgk, № 15-16, 1976, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Гидравлический манипулятор | 1977 |
|
SU683937A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
