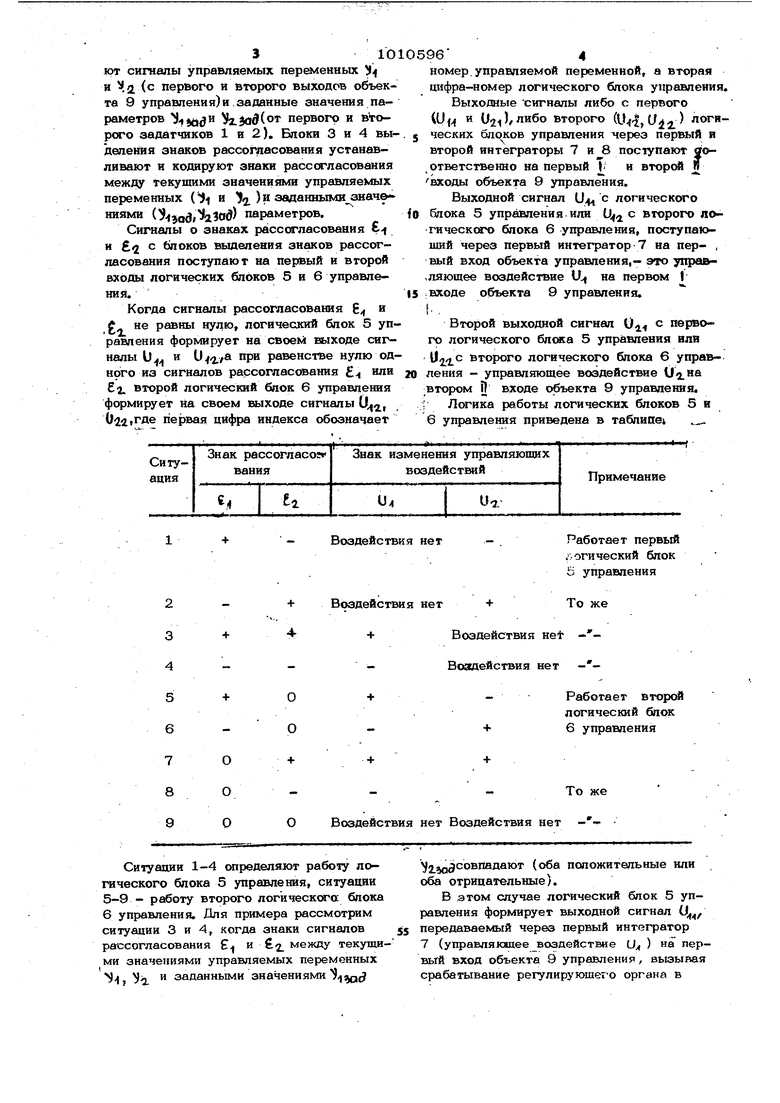
Изобретение относится к автом тичес- кому управлению и может найти применение при построении систем управления различными двусвязными объектами с отрицательной взаимосвязью, позволяющими одному из управляющих входов изменять управляемые переменные объекта управления одинаковым образом (обе управляемые переменные либо увеличивать, либо уменьшать), а по второму управляющему входу объекта изменять управляемые переменные объекта противоположным образом (одну уменьшать, а другую увеличивать). ИзЬестна система управления двусвязным объектом, содержащая два задатчика, два элемента сравнения, два сепаратных регулятора и корректирующие динамические элементы Ч Недостатком данной системы является то, что в ней в процессе регулирования не учитывается сочетание знаков воздействия управляющих входов на управляе.мые переменные. Кроме того, для построения такой системы требуется набор дина мических элементов с разными переда - точными функциями, что усложняет реализацию системы. Наиболее близкой к предлагаемой по технической сущности является система автоматического управления, включающая в себя первый и второй блоки выделения знаков рассогласования, первые входы ко торых соединены соответственно, с первым и вторым задатчиками, вторые входы - с первым и вторым выходами объекта управления, а выходы первого и второго блоков выделения знаков рассогласования Через логический блок управления соецинены соответственно с первым и вторым входами объекта управления 2, Недостатком этой системы управления является неопределенность ее состояния в тех случаях, когда величина заданного задатчикам значения и величина соответ- ствующей управляемой переменной объекта управления совпадают, и сигнал рассогласования между ними становится равным нулю. о В процессе управления периодически возникает такая ситуация, когда сигнал рассогласования с одного из блоков выделения знаков рассогласования равен ну лю, в то время, как сигнал рассогласова ния с другого блока выделения знака рас согласования отличен от нуля. Если рассматривать эту ситуацию, как случай несовпадения знаков рассогласования, то логический блок управления формирует управляющее воздействие на один из входов объекта управления. При этом подвергается ненужному воздействию по перекрестной связи объекта управления другая управляемая переменная, по которой рассогласование равно нулю. Нарушается равенство текущего значения этой управляемой переменной ее заданному значению. Система приходит в неопределенное состояние, вследствие чего теряется устойчивость и точность системы управления. Кроме того, при непосредственной подаче сигнала с логического блока управления на вход объекта -управления происходит резкое изменение управляющего воздействия, что также снижает точность системы автоматического управления. Цель изобретения - повышение точное ти системы автоматического управления путем ликвидации неопределенности состояния системы автоматического управления при равенстве нулю одного из сигналов рассогласования, стабилизации работы, повышение устойчивости системы автоматического управления. Указанная цель достигается тем, что в систему автоматического управления двусвязным объектом, содержащую два блока выделения знака рассогласования, первые входы которых подключены к выходам соответствующих задатчиков, вторые - к соответствующим выходам объекта управления, а «выходы соединены соот-г ветственно с первым и вторым входами первого логического блока, введены второй логический блок и два интегратора, выходы которых подключен ы соответственно к первому и второму входам объекта управления, вход первого интегратора соединен с первыми выходами первого и второго логических блоков, вторые выходы которых соединены с входом второго интегратора, входы второго логического блока соединены с выходами соответственно первого и второго блоков выделения знаков рассогласования. На чертеже схематически изображена система автоматического управления двусвязным объектом. Система содержит первый и второй задатчики 1 и 2, блоки 3 к 4 выделения знаков рассогласования, логические блоки 5 и 6, интеграторы 7 и 8, объект 9 управления. Система автомагического управления работает следукщим образом. На первый и второй блоки 3 к 4 выделения знаков рассогласования поступа- 31О1 ют сигналы управляемых переменных и Ха первого и второго выходов объекта 9 управления)и.заданные значения параметров д(ог первого и второто задатчиков 1 и 2). Блоки 3 и 4 выделения знаков рассогласования устанавливают и кодируют знаки рассогласования между текущими значениями управляемых переменных ( и }нзвла ашмя №ч& ниями (-15ой,аЗод) параметров. Сигналы о знаках рассогласования Е и с блоков выделения знаков рассогласовшсия поступают на первый и второй входы логических блоков 5 и 6 управления. Когда сигналы рассогласования g и g не равны нулю, логический блок 5 управпения формирует на своем выходе сигналы и и U, при равенстве нулю однрго из сигналов рассогласования или второй логический блок 6 управления формирует на своем выходе сигналы 0, 0 4|Где первая цифра индекса обозначает 964 номер, управляемой переменной, а вторая цифра-номер логического блока управления, Выходные сигналы либо с первого (Uf и иг Ьлибо второго (,) ческих блоков управления -через первый и второй интеграторы 7 и 8 пос1упают доответственно на первый Т н вторсЛ j входы объекта 9 управления. Выходной сигнал идеологического Блока 5 управления или Ц/, с второго логического блока 6 управления, поступающий через первый интегратор 7 на пер- , вый вход объекта управления,- это ;пра& чляющее воздействие U на первом :входе объекта 9 управления. Второй выходной сигнал 0 с первого логического 5 управления или второго логического блока 6 управления - управляющее воздействие втором И входе объекта 9 управления, ; Лсмгика работы логических блоков 5 и 6 управления приведена в таблиае; 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| Система управления технологическим процессом | 1985 |
|
SU1403014A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| Устройство для формирования сигнала управления | 1977 |
|
SU734612A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВУСВЯЗНЫМ ОБЪЕКТОМ, содержащая два баока вьшелёния знака рассогласования, Первые входы коУпра алеме /г перененнвд торых подключены к выходам соответствующих задатчиков, вторые - к соответствуклдим выходам объекта управления, ja выходы соединены соответственно с пер вым и вторым входами первого логического блока, отличающаяся тем, что, с целью повышения точности системы, э нее введены второй логический бпок и два интегратора, выходы которых .подключены соответственно к первому в второму входам объекта управления, вход первого интегратора соединен с первыми выходами первого и второго логических блокЫв, вторые выходы которых соединены с входом второго интегратора, входы второго логического блока соеди;нены свыходами соответственно первого и второго блоков выделения знаков рас. согласования. О ел СО у/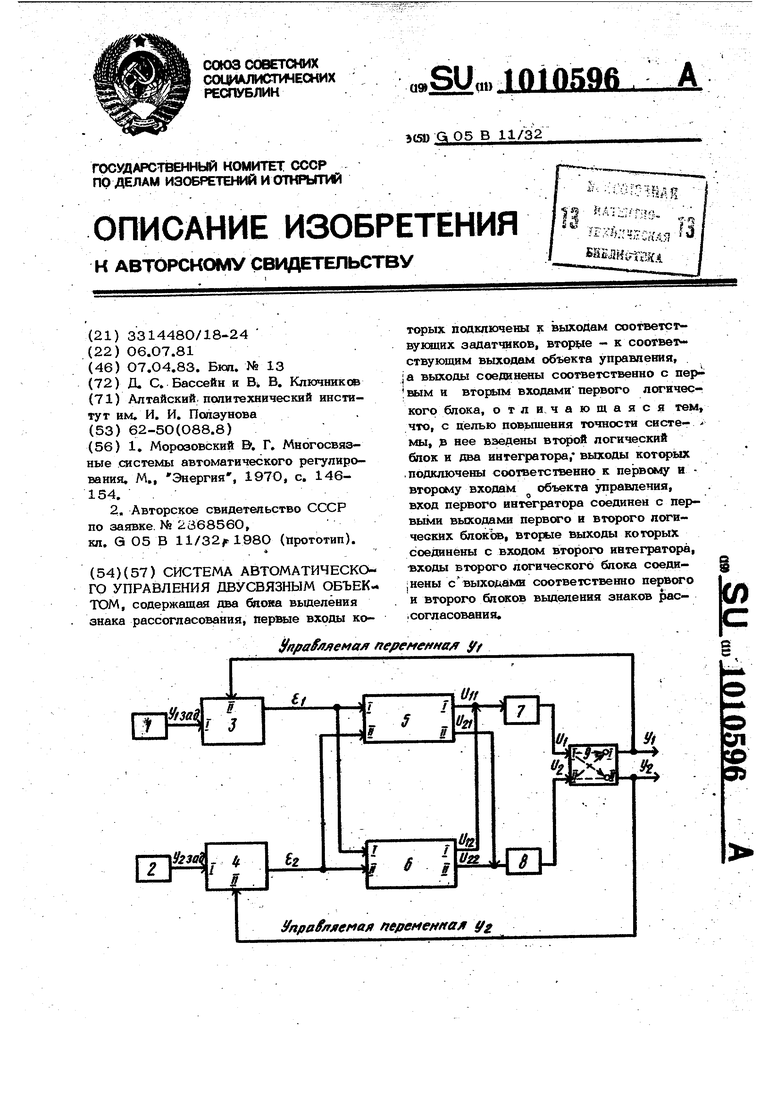
Воздействия нет
Ситуации 1-4 определяют работу логического блока 5 управления, ситуации 5-9 - регботу второго логического: блока 6 управления. Для примера рассмотрим ситуации 3 и 4, когда знаки сигналов рассогласования и fe. между текущими значениями управляемых переменных и заданными значениями (J
Работает первый .логический блок
2,соълааают (оба попожительные или оба отрицательные).
В этом случае логический блок 5 управления формирует выходной сигнал передаваемый через первый интегратор 7 (управлягадее воздействие (J ) на первый вход объекта 9 управления, вызывая срабатывание регулирующего органа в
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Морозовский В | |||
| Г | |||
| Многосвязные системы автоматического регулирования, М,, Энергия, 1970, с | |||
| Гидротрансформатор | 1958 |
|
SU146154A1 |
| Авторское свидетельство СССР по заявке, hfe 2368560, кл, G О5 В ll/32f 1Э8О (прототип) | |||
| -г | |||
