2.Манипулятор по п. 1, отличающийся тем, что казвдый из любой пары противолежащих шарниров ромбообразного звена выполнен в виде оси с двумя зубчатьоми колесами, причем одно колесо может перемещаться вокруг оси и относительно другого колеса,
3.Манипулятор по п.1, о т ли чающийс я тем, что каждый из любой пары противолежащих шарниров ромбообразного звена выполнен в виде оси с тремя зубчатыми колесами, причем среднее колесо может перемещаться вокруг оси и относительно двух крайних.
4, Манипулятор по п. 1, отличающийся тем, что каждый из любой пары противолежащих шарниров ромбообразного звена выполнен в виде двух параллельно соединенных между собой осей, на каждой из которых установлены два зубчатых колеса,- причем одно колесо каждой оси может перемещаться вокруг оси относительно другого колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU921848A1 |
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Дифференциальный манипулятор | 1983 |
|
SU1119838A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1988 |
|
SU1541045A1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
1. МАНИПУЛЯТОР, содержащий ромбообразные звенья, соединенные шарнирно между собой и с захватом, )И блок управления, причем звенья выполнены из идентичных модулей перемещения и соединяющих их попарно шарниров, отличающийс я тем, что, с целью повышения точности позиционирования путем уменьшения зазоров в шарнирах, модули перемещения выполнены в виде двух жестко соединенных узлов. Каждый из которых состоит из двигателя с редуктором и двух установленных на концах выходного вала редуктора шестерен. (О с Са ю О1 со
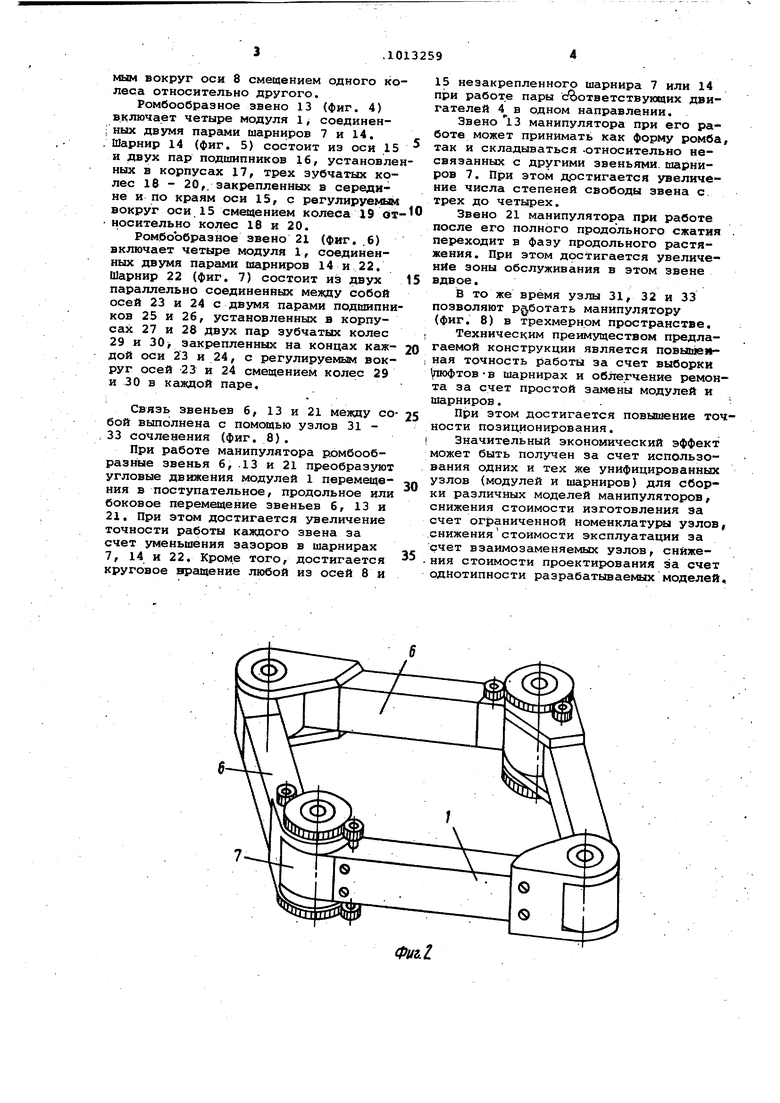
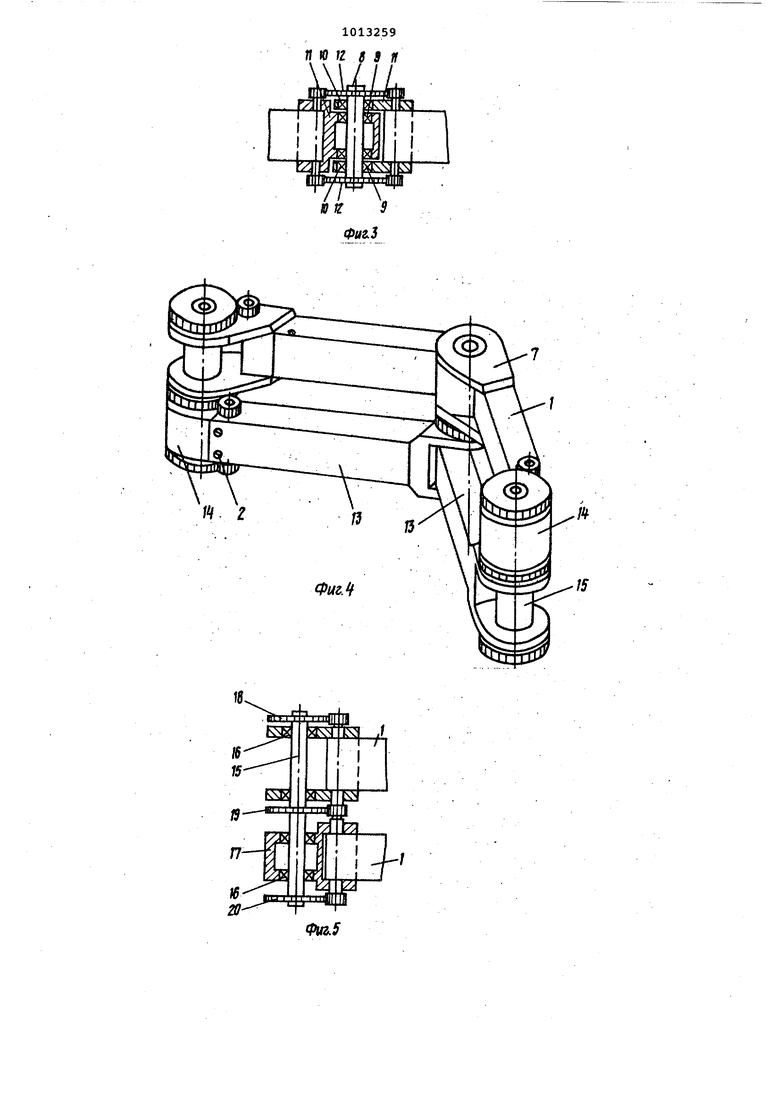
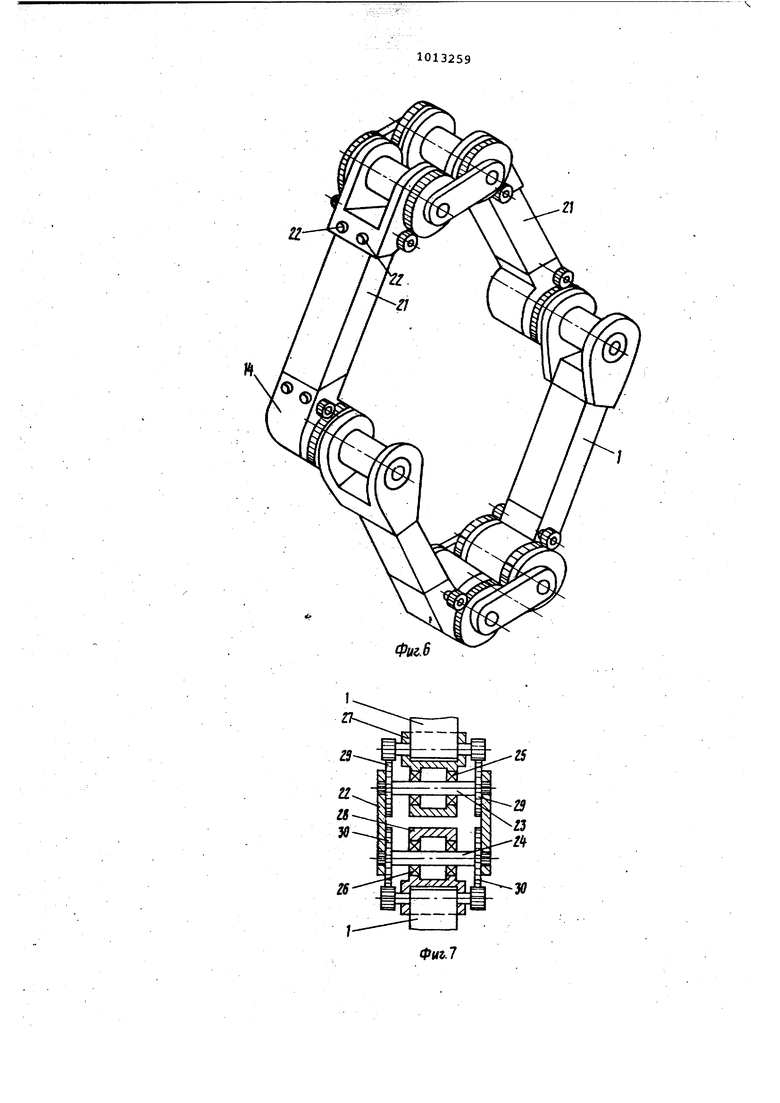
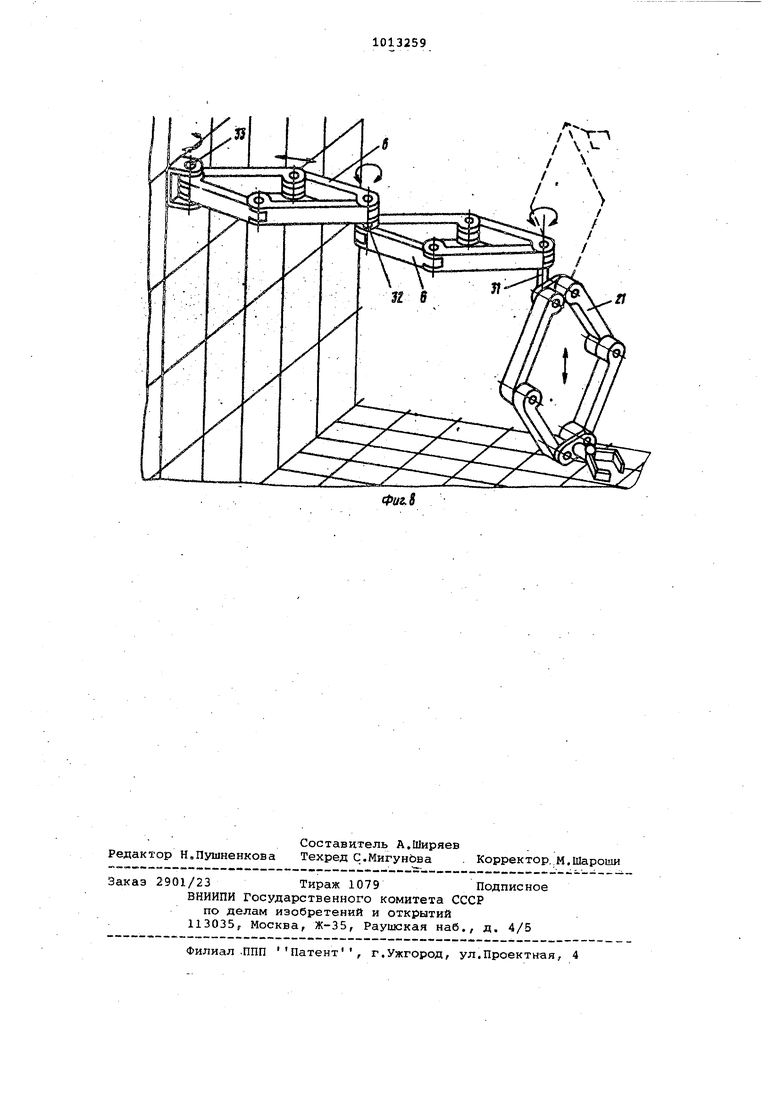
Изобретение относится к машиностроению, а именно к промышленным раЬо таМ, предназначенным для автоматизации тяжелых и монотонных работ, а также для работ в опасных и труднодоступных зонах. Известны .манипуляторы, содержащие ромбообразные звенья, каждое из кото рых включает четыре рычага, соединен ных узлами вращения, из которых две Ьары сопряжённых узлов имеют общую ось соединенную с другими звеньями, захватом или основанием, а два несо- пряженнЕлх узла находится на другой диагонали звена 1.й 2. Однако недостаточная гибкость и значительные габариты звеньев, вызванные конструкцией установки рычагов и двигателей с редукторами, приводят в конечном счете к снижению функциональных возможностей, Известен также манипулятор, содер жащий блок управления и ромбообразные звенья, соединенные шарнирно меж ду собой и с захватом (3. Однако этот манипулятор имеет ограниченные технологические возможнос ти в связи с тем, что шарниры его звеньев имеют зазоры, приводящие к уменьшению точности работы манипулятора, что вместе с отсутствием унифи цированных узлов ограничивает област его применения. Цельюизобретения является повыше ние точности позицирования за счет уменьшения зазоров в шарнирах. Указанная цель достигается тем, ч.то в манипуляторе, содержащем ромбо образные звенья, соединенные шарнирно между собой и с захватом, и блок управления, причем все звенья выполнены из идентичных модулей перемещения и соединяющих их попарно шарниров , каждый модуль перемещения выпол нен в виде двух жестко соединенных узлов, каждый из которых состоит из двигателя с редуктором и двух установленных на концах выходного вала редуктора шестерен. Кроме этого, каждый из любой пары противолежащих шарниров ромбообразного звена может быть выполнен в виде оси с двумя зубчатыми колесами, причем одно колесо может перемещаться вокруг оси и относительно другого колеса, или в виде оси с тремя зубчатыми колесами, причем среднее колесо может перемещаться относительно двух крайних колес, а также в виде двух параллельно соединенных между собой осей, на каждой из которых установлены два зубчатых колеса, причем одно колесо каждой оси имеет возможность перемещаться относительно другого колеса. На фиг. 1 представлена конструкция модуля перемещения; на фиг. 2 звено 1 типа, общий вид; -на фиг. 3 конструкция шарнира 1 типа; на фиг. 4 - звено II типа, общий вид; на фиг. 5 - конструкция шарнира II типа; на фиг. 6 - конструкция шарнира III типа звено III типа, общий вид; на фиг. 7 - конструкция шарнира III типа; на фиг. 8 - манипулятор, общий вид. , Модуль 1 перемещения (фиг. 1) состоит из рычага 2. и двух узлов 3, кажйый из которых включает двигатель 4, редуктор 5 и две шестерни, установленные на выходном валу редуктора 5. Ромбообразное звено б (фиг. 2) включает четыре модуля 1, соединенных четырьмя идентичными шарнирами 7. Шарнир 7 (фиг. 3) состоит из оси 8 и двух внутренних и внешних подшипников 9 и 10, установленных в корпусах 11, и пары зубчатых колес 12, закрепленных на концах оси 8, с аегулируемым вокруг оси 8 смещением одного ко леса относительно другого. Ромбообразное звено 13 (фиг. 4) включает четыре модуля 1, соединенных двумя пареши шарниров 7 и 14. Шарнир 14 (фиг. 5) состоит из оси 15 и двух пар подшипников 16, установле ных в корпусах 17, трех зубчатых колес 18 - 20,. закрепленных в середине и по краям оси 15, с регулируемым вокруг оси 15 смещением колеса 19 от носительно колес 18 и 20. Ромбообразное звено 21 (фиг. .6} включает четыре модуля 1, соединенных двумя парами шарниров 14 и 22. Шарнир 22 (фиг. 7) состоит из двух параллельно соединенных междУ собой осей 23 и 24 с двумя парами подшипни ков 25 и 26, установленных в корпусах 27 и 28 двух пар зубчатых колес 29 и 30 закрепленных на концах каждои оси 23 я 24f с регулируемым вокруг осей 23 и 24 смещением колес 29 и 30 в Кс1ждой паре. Связь звеньев 6, 13 и 21 между со бой вьшблнена с помощью узлов 31 33 сочленения (фиг. 8). При работе манипулятора ромбообразные звенья 6, .13 и 21 преобразуют угловые движения модулей 1 перемещения в поступательное, продольное или боковое перемещение звеньев б, 13 и 21. При этом достигается увеличение точности работы каждого звена за счет уменьшения зазоров в шарнирах 7, 14 и 22. Кроме того, достигается круговое вращение любой из осей 8 и 15 незакрепленного шарнира 7 или 14 при работе пары соответствующих двигателей 4 в одном направлении. Звено l3 манипулятора при его работе может принимать как форму ромба, так и складываться -относительно несвязанных с другими звеньями, шарниров 7. При этом дрстигается увеличение числа степеней свободы звена с трех до четырех. Звено 21 манипулятора при работе после его полного продольного сжатия . переходит в фазу продольного растяжения. При этом достигается увеличение зоны обслуживания в этом звене вдвое. В то же время узлы 31, 32 и 33 позволяют работать манипулятору (фиг. 8) в трехмерном пространстве. Техническим преимуществом предлагаемой конструкции является повыда ная точность работы за счет выборки .пюфтов-в шарнирах и облегчение ремонта за счет простой замены модулей и шарниров. При этом достигается повышение точности позиционирования. Значительный экономический эффект может быть получен за счет использования одних и тех же унифицированных узлов (модулей и шарниров) для сборки различных моделей манипуляторов, снижения стоимости изготовления эа счет ограниченной номенклатуры узлов, снижениястоимости эксплуатации за счёт взаимозаменяемых узлов, снйжения стоимости проектирования за счет однотипности разрабатываемых моделей.
1013259
П to К S 8 И
21
г
Фи&.Ъ
zs
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
