фиг.1
Щиг.1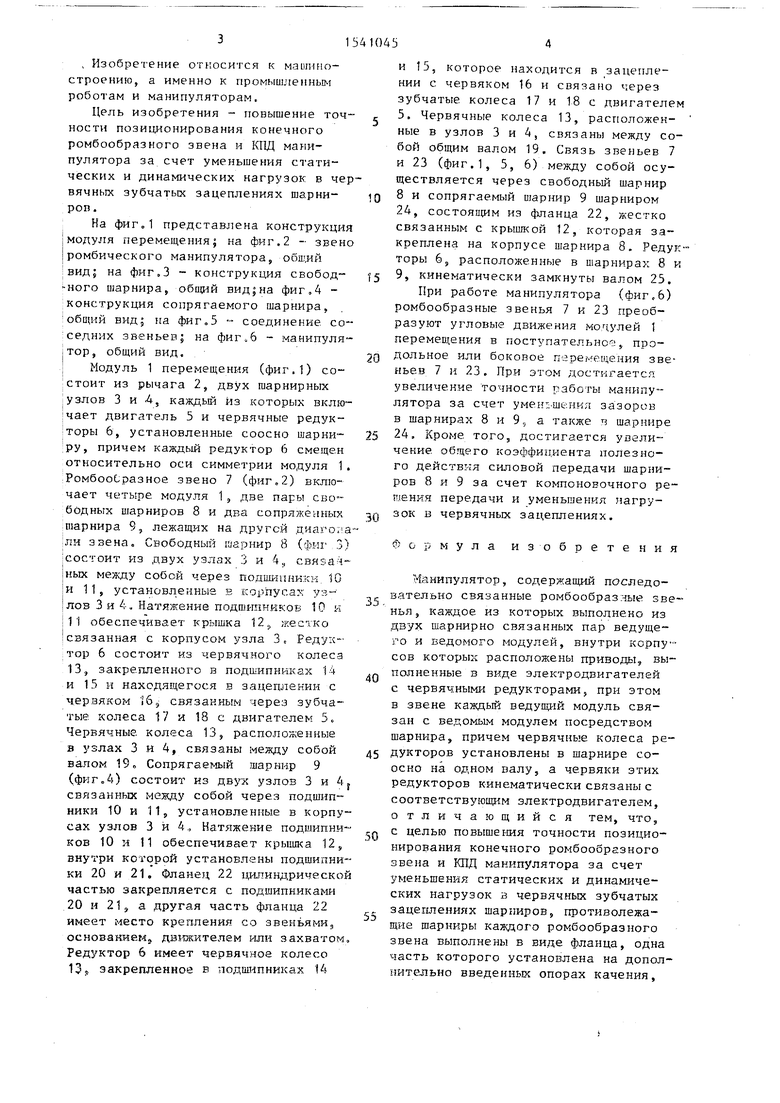
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1013259A1 |
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Манипулятор | 1980 |
|
SU921848A1 |
| Манипулятор | 1975 |
|
SU528194A2 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Модуль шарнира | 1980 |
|
SU980979A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Звено-модуль руки манипулятора | 1984 |
|
SU1194668A1 |
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |

Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам. Целью изобретения является повышение точности позиционирования конечного ромбообразного звена и КПД манипулятора за счет уменьшения статических и динамических нагрузок в червячных зубчатых зацеплениях шарниров. При включении электроприводов, расположенных в каждом корпусе модулей ромбообразных звеньев 7 и 23, происходит относительное перемещение этих корпусов относительно продольных осей шарниров 8 и 9. Управляя углом разворота корпусов модулей относительно продольных осей шарниров 8, 9, получают определенную траекторию движения и точку позиционирования схвата манипулятора. 6 ил.
Ј 2Лф
Ь VO I Ј 1
IX/ x s у / у
Редактор С.Патрушева
Составитель А.Уваров
Техред Л.Сердюкова Корректор М.Шароши
Заказ 253
Тираж 700
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб.5 д. А/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
/Я
Фиг.5
Подписное
| Манипулятор | 1987 |
|
SU1414625A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
