Изобретение относится к машиностроению, а именно к промышленным роботам, предназначенным для автоматизации технологических процессов в различных отраслях машиностроения.
Известен дифференциальный манипулятор, содержащий блок управления, схват и ромбические звенья, соединенные узлами сочленения, причем каждое ромбическое звено состоит из четырех модулей и соединяющих их попарно шарниров, при этом каждый модуль включает рычаг и не более двух встречно установленных в нем узлов вращения, состоящих из двигателя с редуктором, а каждый шарнир содержит не менее двух установленных на его оси зубчатых колес 1.
Однако известный манипулятор имеет ограниченные функциональные возможности в связи с тем, что величина крутящего момента на шарнирах звена может быть получена только за счет соответствующей пары двигателей звена.
Цель изобретения - расширение функциональных возможностей путем обеспечения передачи момента от одного ромбического звена к другому.
Указанная цель достигается тем, что в дифференциальном манипуляторе, содержащем блок управления, схват и ромбические звенья, соединенные узлами сочленения, причем каждое ромбическое звено состоит из четырех модулей и соединяющих их попарно шарниров, при этом каждый модуль включает рычаг и не более двух двигателей с редукторами, а каждый шарнир содержит не менее двух установленных на его оси зубчатых колес, каждый узел сочленения звеньев выполнен в виде трех пар конических передач, расположенных в корпусе, и трех нормально закрытых электромагнитных муфт, причем одна внешняя пара конических передач находится в постоянном зацеплении, а две внутренние пары конической передачи наход,ятся в зацеплении посредством двух нормально закрытых электромагнитных муфт, установленных на выходном валу этих передач, при этом выходной вал обеих внутренних конических передач жестко связан с шарниром одного модуля второго звена, а выходной вал внешней пары конической передачи жестко связан с шарниром другого модуля второго звена, а входной вал внешней пары конической передачи соединен с шарниром первого звена, кроме того третья электромагнитная муфта установлена на корпусе соосно с входным валом.
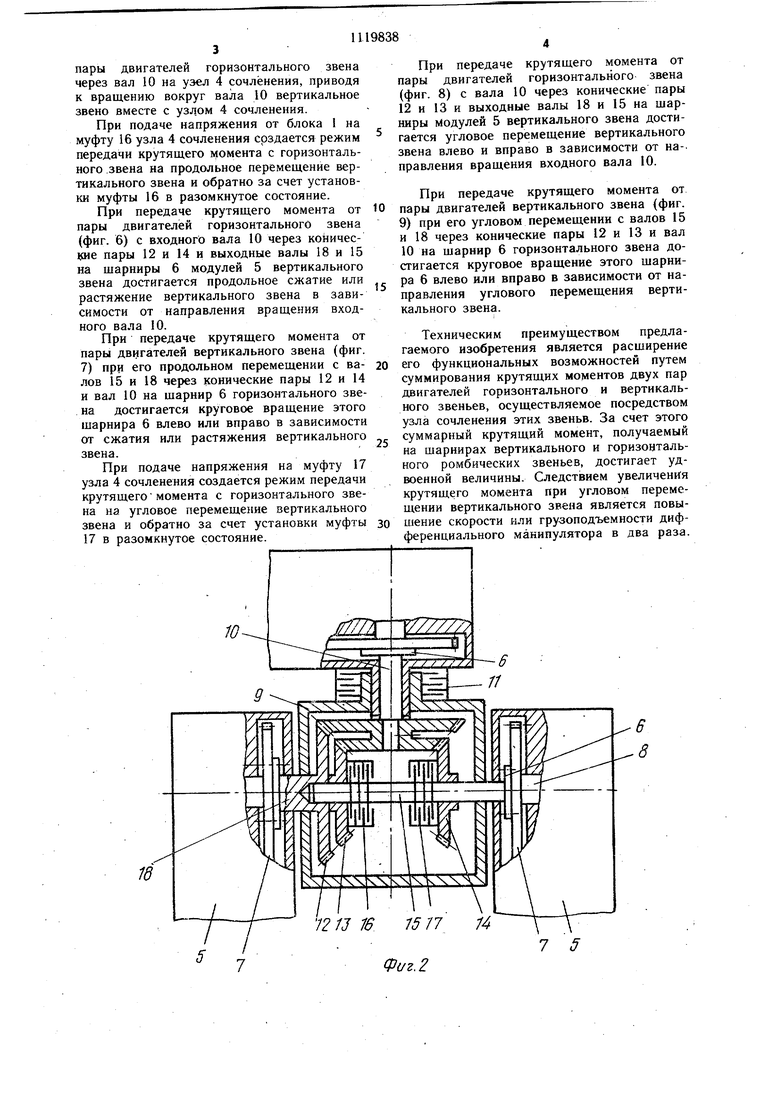
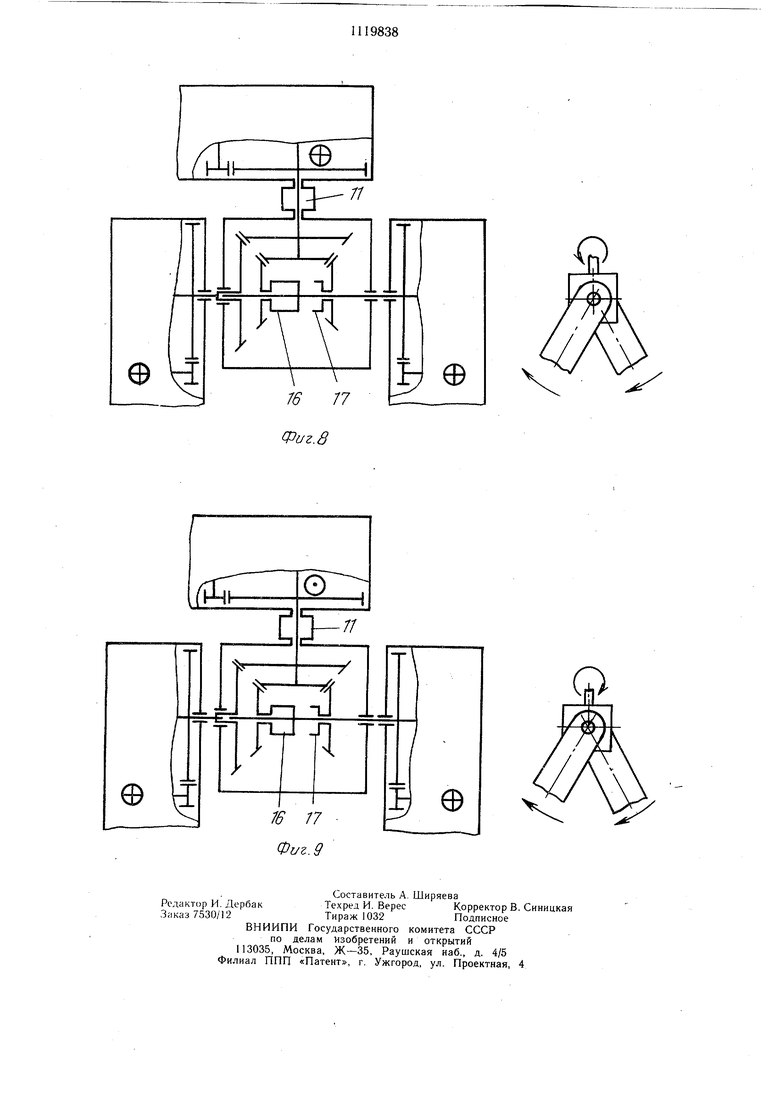
На фиг. 1 представлен дифференциальный манипулятор, общий вид; на фиг. 2 - структура узла сочленения; на фиг. 3-9 - кине.матические схемы узла сочленения манипулятора, соответствующие различным режимам его работы.
Дифференциальный манипулятор включает блбк 1 управления, схват 2 и ромбические звенья 3, соединенные узлами 4 сочленения (фиг. 1). Каждое звено состоит из четырех модулей 5, соединенных между собой шарнирами 6. Каждый щарнир б содержит зубчатые колеса 7, установленные на оси 8. Каждый узел 4 сочленения включает корпус 9 (фиг. 2), установленную на корпусе соосно входному валу 10 муфту 11
и три пары конических передач 12-14, установленных внутри корпуса 9. Соосно выходному валу 15 установлены две муфты 16 и 17, причем вал соединен с шарниром 6 одного модуля 5 вертикального звена 3, а
5 выходной вал 18 соединен с шарниром 6 другого модуля 5 того же звена 3. Входной вад 10 конической передачи соединен с шарниром б горизонтального звена. Кроме того, на нижнем шарнире 6 несущего вертикального звена установлено опорное ко0 лесо 19.
При работе дифференциального манипулятора узлы вращения каждого звена 3 преобразуют угловые движения модулей 5 в продольное перемещение или боковое
5 вращение звеньев, а также в круговое вращение шарнира 6, снабженного колесом 19.
В узле сочленения горизонтального и вертикального звеньев 3 за счет подачи соответствующего напряжения от блока 1
управления на муфты 11, 16 и 17 происходит передача крутящего момента от двигателей горизонтального звена 3 на вертикальное звено 3 и обратно от двигателей вертикального звена на горизонтальное.
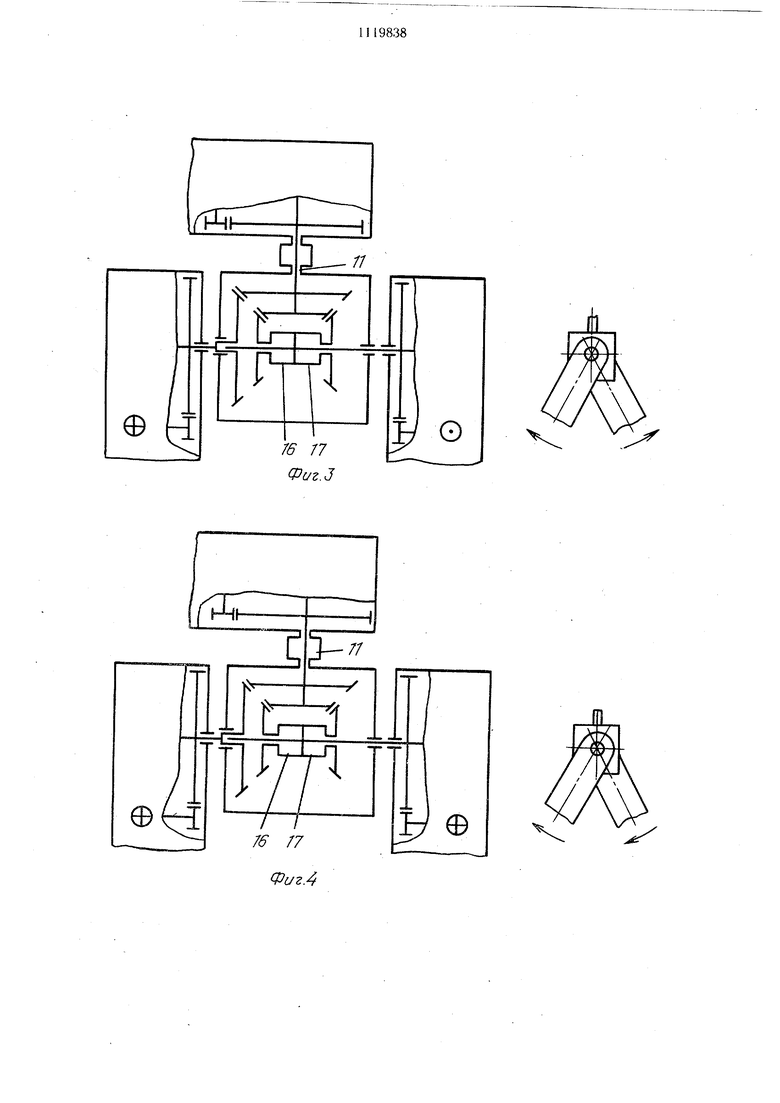
5 При отсутствии напряжения на всех муфтах 11, 16 и 17 создается щтатный режим продольного перемещения вертикального звена за счет установки всех муфт в замкнутое состояние. При этом крутящий момент от пары двигателей вертикального
0 звена создается на валах 18 и 15, жестко соединенных между собой за счет сочленения всех трех конических передач 12-14 муфтами 11, 16 и 17. При вращении шарниров 6 двух модулей 5 вертикального зве5 на (фиг. 3) во встречном направлении от соответствующей пары двигателей этих модулей осуществляется продолжительное перемещение вертикального звена.
При вращении шарнира 6 двух модулей 5 0 вертикального звена (фиг. 4) в согласном направлении от тех же двигателей создается щтатный режим углового перемещения вертикального звена.
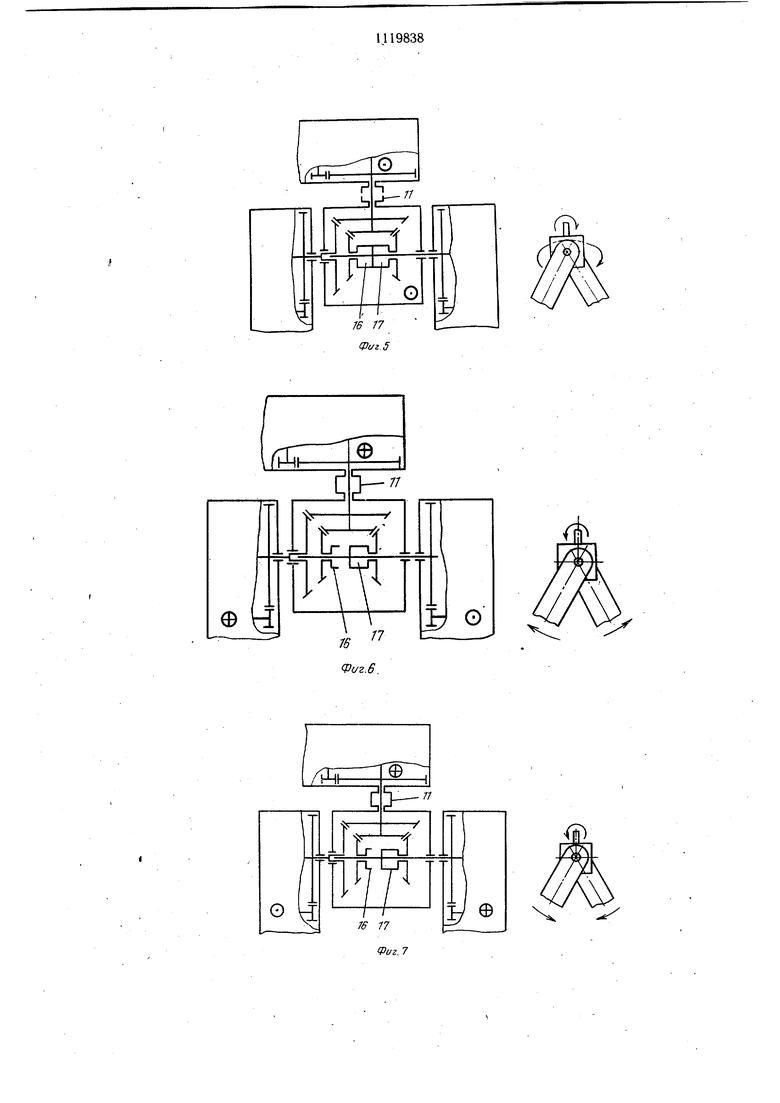
При подаче напряжения от блока 1 на 5 муфту 11 узла сочленения (фиг. 5) создается штатный режим кругового ориентирования вертикального звена за счет установки муфты в разомкнутое состояние. При этом крутящий момент передается от
пары двигателей горизонтального звена через вал 10 на узел 4 сочленения, приводя к вращению вокруг вала 10 вертикальное звено вместе с узлом 4 сочленения.
При подаче напряжения от блока 1 на муфту 16 узла 4 сочленения создается режим передачи крутящего момента с горизонтального звена на продольное перемещение вертикального звена и обратно за счет установкк муфты 16 в разомкнутое состояние.
При передаче крутящего момента от пары двигателей горизонтального звена (фиг. 6) с входного вала 10 через коничесvue пары 12 и 14 и выходные валы 18 и 15 на шарниры 6 модулей 5 вертикального звена достигается продольное сжатие или растяжение вертикального звена в зависимости от направления вращения входного вала 10.
При передаче крутящего момента от пары двигателей вертикального звена (фиг. 7) при его продольном перемещении с валов 15 и 18 через конические пары 12 и 14 и вал 10 на шарнир 6 горизонтального звена достигается круговое вращение этого шарнира 6 влево или вправо в зависимости от сжатия или растяжения вертикального звена.
При подаче напряжения на муфту 17 узла 4 сочленения создается режим передачи крутящего момента с горизонтального звена на угловое перемещение вертикального звена и обратно за счет установки муфты 17 в разомкнутое состояние.
При передаче крутящего момента от пары двигателей горизонтального звена (фиг. 8) с вала 10 через конические пары 12 и 13 и выходные валы 18 и 15 на щарниры модулей 5 вертикального звена достигается угловое перемещение вертикального звена влево и вправо в зависимости от направления вращения входного вала 10.
При передаче крутящего момента от пары двигателей вертикального звена {фиг. 9) при его угловом перемещении с валов 15 и 18 через конические пары 12 и 13 и вал 10 на шарнир 6 горизонтального звена достигается круговое вращение этого щарнн ра 6 влево или вправо в зависимости от направления углового перемещения вертикального звена.
Техническим преимуществом предлагаемого изобретения является расширение
0 его функциональных возможностей путем суммирования крутящих моментов двух пар двигателей горизонтального и вертикального звеньев, осуществляемое посредством узла сочленения этих звеньв. За счет этого суммарный крутящий момент, получаемый на шарнирах вертикального и горизонтального ромбических звеньев, достигает удвоенной величины. Следствием увеличения крутящего момента при угловом перемещении вертикального звена является повы0 шение скорости или грузоподъемности дифференциального манипулятора в два раза.
СЕ
II
t
г
/ /7 Фиг.З
о
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1197833A1 |
| Манипулятор | 1986 |
|
SU1393620A1 |
| Дифференциальный манипулятор | 1983 |
|
SU1110625A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Манипулятор | 1988 |
|
SU1548035A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
ДИФФЕРЕНЦИАЛЬНЫЙ МАНИПУЛЯТОР, содержащий блок управления, схват и ромбические звенья, соединенные узлами сочленения, причем каждое ромбическое звено состоит из четырех модулей и соединяющих их попарно щарниров, при этом каждый модуль включает рычаг и не более двух двигателей с редукторами, а каждый шарнир содержит ие менее двух установленных на его оси зубчатых колес, отличающийся тем, что, с целью расщирения его функциональных возможностей путем обеспечения передачи момента от одного ромбического звена к другому, каждый узел сочленения звеньев выполнен в виде трех пар конических передач, расположенных в корпусе, и трех нормально закрытых электромагнитных муфт, причем одна внещняя пара конической передачи находится в постоянном зацеплении, а две внутренние пары конической передачи находятся в зацеплении посредством двух нормально закрытых электромагнитных муфт, установленных на выходном валу этих передач, при этом выходной вал обеих внутренних коническнх передач жестко связан с шарниром одного модуля второго звена, а выходной вал внешней пары конической передачи жестко связан с шарниром дру@ гого модуля второго звена, а входной вал внешней пары конической передачи соединен с шарниром первого звена, кроме того третья электромагнитная муфта установлена на корпусе соосно с входным валом. СО 00 ОО 00
ф
(Ж)
ЕН
ГпЗ.
/i
Фиг.б.
В О
С
г;
о
riiD
/ 77 . 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1982 |
|
SU1013259A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
