Изобретение относится к оборудованию грузоподъемных установок, выполняющих технологические операции в судостроительной промышленности, и предназначено для транспортировки и укладки листовых изделий при изготовлении судовых секций,
Известна траверса для подъема и транспортировки литовых изделий, содержащая раму, снабженную приспособлением для навешивания ее на крюк грузоподъемного механизма, и закрепленные на раме электромагниты и подхватные лапы 1.
Недостаткани данного устройства являются его ограниченные возможности в работе с грузами различной формы и типоразмеров.
Цель изобретения - расширение функциональных возможностей за счет подъема и транспортировки грузов различной формы и типоразмеров.
Указанная цель достигается тем, что подхватные лапы закреплены на раме с помощью поворотных в вертикальной плоскости и раздвижных от привода штанг и снабжены механизмом их перемещения в вертикальном направлении.
При этом механизм перемещения подхватных лап снабжен датчиком контроля за кромкой листового изделия.
Кроме того, с целью расщирения ее возможностей по укладке изделий, траверса снабжена приводным механизмом наклона рамы относительно приспособления для навешивания траверсы на крюк грузоподъемного устройства.
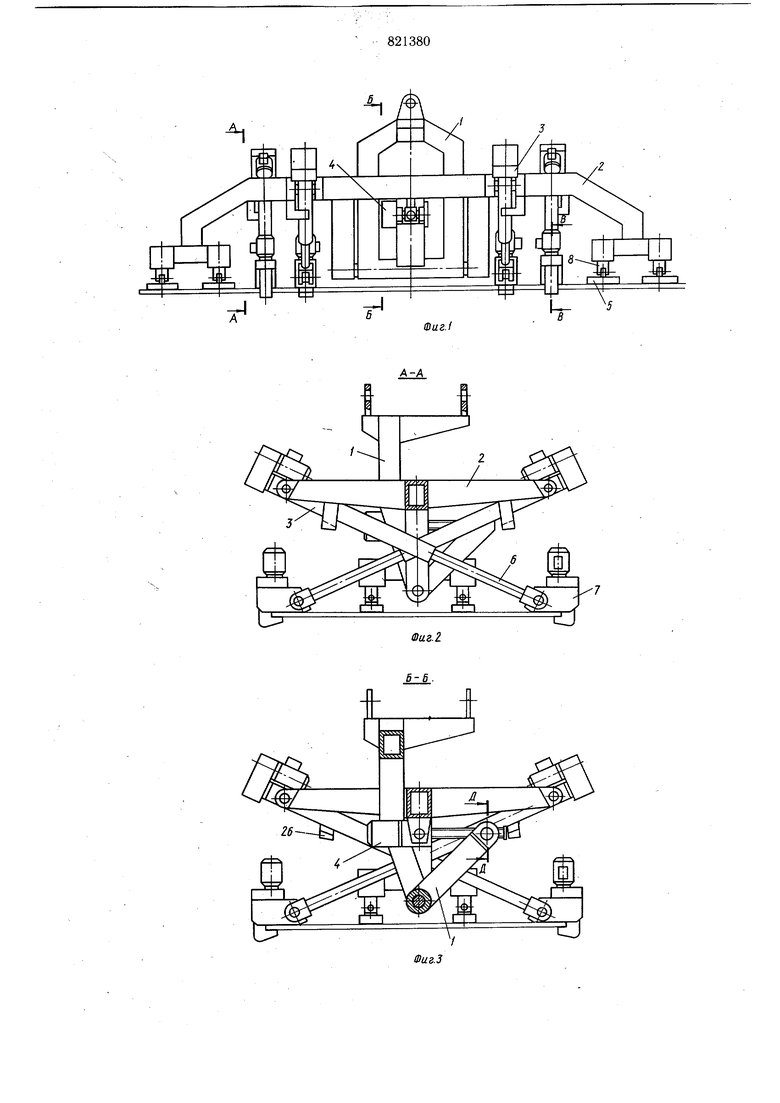
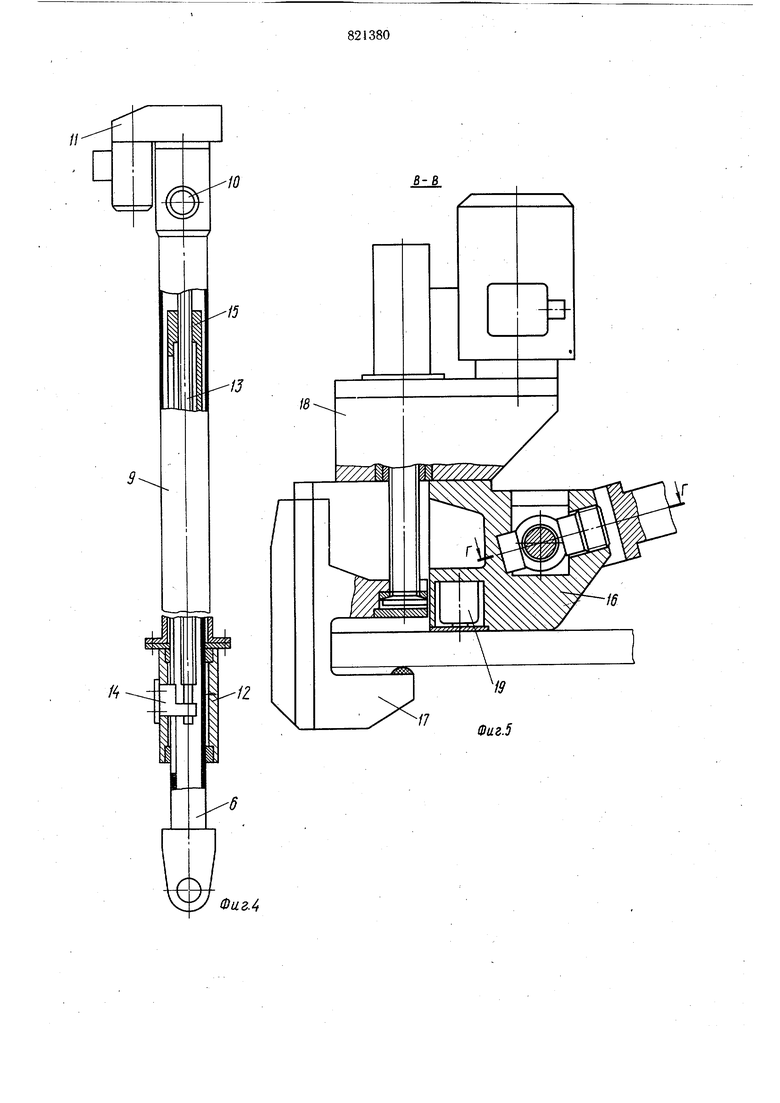
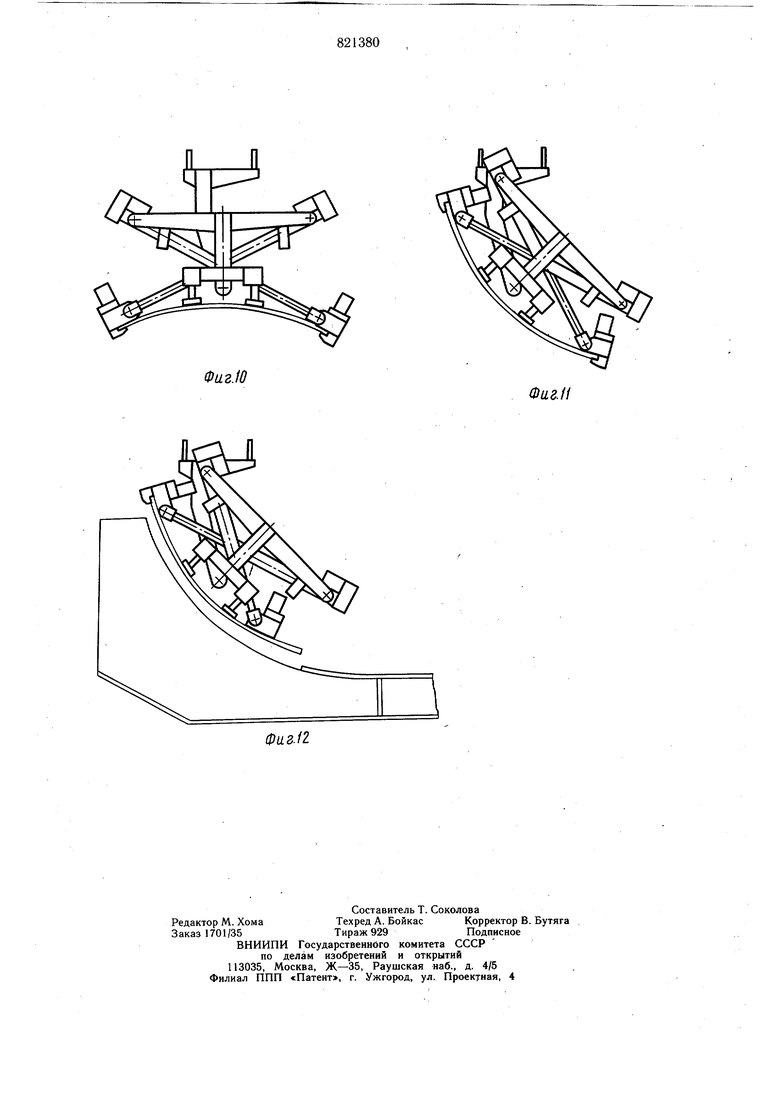
На фиг. 1 изображена траверса, обший вид (вариант транспортировки плоского листового изделия); на фиг. 2 - разрез А-А на фиг. 1 ; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - механизм раздвижения штанги; на фиг. 5 - разрез В-В на фиг. J; на фиг. 6 - разрез Г-Г на фиг. 5; на фиг. 7 - разрез Д-Д на фиг. 3; на фиг. 8-12 - траверса в различных рабочих положениях.
Траверса состоит из приспособления 1 для повышения ее на крюк грузоподъемного механизма, на оси которого закреплена рама 2. Рама представляет собой продольную сварную балку коробчатого сечения, к консолям которой закреплены на цапфах механизмы 3 раздвижения штанг и приводной механизм 4 наклона рамы. Вдоль рамы двумя рядами крепятся электромагниты 5. К штангам б шарнирно закреплены подхватные лапы 7. Электромагниты 5 выполнены продолговатой формы и шарнирно подвешены на подпружиненных штоках 8. Это обеспечивает надежное прилегание и удерживание криволинейных листов. Механизм раздвижения штанги состоит из корпусной детали 9 с цапфами 10, к которой крепятся привод 11 в направляюш,ий блок 12. Привод врашает винт 13, который свободным концом вращается в опоре 14. Штанга 6 имеет закрепленную с одного конца гайку 15 и перемещается при вращении винта 13 в направл ющем блоке 12. Опора 14 одновременно сЛужит направляющей щпонкой для выдвижной штанги 6. Механизм раздвижен.ия штанги имеет конечный выключатель (не показан), который отключает привод И при достижении определенного усилия на выдвижной штанге 6. Подхватные лапы 7 установлены в корпусе 16, в котором по направляющим перемещается губка 17 с помощью винтового привода 18. Губка в исходном положении прячется в корпусе и не препятствует перемещению лапы по поверхности листа. В корпус встроен бесконтактный конечный выключатель 19 - датчик контроля, который подает команду на -остановку привода 11 механизма раздвижения штанги при выходе захвата на кромку листа. Штанга 6 заканчиваетсявилкой, через которую пропушена ось 20. На ось посажена сферическая втулка 21, которую охватывают сухари 22 и 23, закрепленные в корпусе. Таким образом, лапа вращается на оси 20 в вертикальной плоскости, копируя кривизну листа, а также совершать движения в двух других плоскостях, что позволяет копировать кромку листового изделия. Привод наклона -рамы закреплен шарнирно на раме 2. Вращение электродвигателя через редуктор передается винту, второй опорой которого является гайка, закрепленная приспособлением 1. При этом расстояние между приводом и гайкой уменьшается и, поскольку приспособление 1 закреплено неподвижно к цеховой грузоподъемной установке, происходит поворот рамы со всеми закрепленными на ней элементами на нужный угол. Шарнирное закрепление привода наклона 4, гайки 24 к корпусу 25, в котором закрепляется гайка, позволяет самоустанавливать приводной механизм 4 наклона и гайку 24, а также компенсировать неточность установки этих элементов на раме и приспособлении 1. Траверса крепится к поворотному устройству грузоподъемной установки с помощью приспособления 1. Управление траверсой происходит из кабины грузоподъемной установки, где расположен пульт управления. В ИСХОДНОМ положении траверсы раздвижные штанги находятся во втянутом положении, механизмы раздвижения штанг опираются на упоры 26, лапы висят на штангах в крайнем нижнем положении, губки втянуты в корпусы (фиг. 8). Затем траверса укладывается на захватываемое листовое изделие, включаются электромагниты, и с помощью грузоподъемной установки лист отрывается от пакета и поднимается, над ним на небольщую высоту. Включаются механизмы раздвижения штанг, которые перемещают лапы до выхода их за кромку листовой детали, т.е. до момента срабатывания конечного выключателя, встроенного в корпус захвата (фиг. 9). Винтовые приводы лап выдвигают из корпусов губки в крайнее нижнее положение, включаются приводы раздвижения штанг на стягивание лап до упора губок в торцы листовой детали. При достижении определенного усилия на штангах приводы отключаются и происходит силовой зажим кромок листа (фиг. 10). Лист транспортируется к месту укладки и непосредственно над ним происходит его наклон листа на нужный угол, если лист уложен на наклонную поверхность (фиг. 11), вариант захвата вогнутого листа. Над местом стыковки укладываемого листа освобождается стыкуемая кромка от лап и лист укладывается на нужное место (фиг. 12). Освобождение от лап происходит в обратном порядке, описанном при захвате кромок. Формула изобретения 1.Траверса для подъема и транспортировки листовых изделий, содержащая раму, снабженную приспособлением для навешивания ее на крюк грузоподъемного механизма, и закрепленные на раме электромагниты и подхватные лапы, отличающаяся тем, что, с целью расширения ее функциональных возможностей за счет подъема и транспортировки грузов различной формы и типоразмеров, подхватные лапы закреплены на раме с помощью поворотных в вертикальной плоскости и раздвижных от привода штанг и снабжены механизмом их перемещения в верт икальном направлении. 2.Траверса по п. 1, отличающаяся тем, что механизм перемещения подхватных лап снабжен датчиком контроля за кромкой листового изделия. 3.Траверса по пп. 1 и 2, отличающаяся тем, что, с целью расширения ее возможностей по укладке изделий, траверса снабжена приводным механизмом наклона рамы относительно приспособления для навешивания траверсы на крюк грузоподъемного механизма. Источники информации, принятые во внимание при экспертизе 1. Меламед С. М. Автоматические захваты для штучных грузов. М.Д 965, с. 60, фиг. 37 (прототип).
Ч
Фuг.f

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1731717A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Захват для листовой стали | 1977 |
|
SU753772A1 |
| Траверса | 1984 |
|
SU1447747A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Транспортная система линии расконсервации изделий | 1981 |
|
SU1002215A1 |
| Грузозахватное устройство | 1978 |
|
SU816926A1 |
| Захват для изделий с внутренней полостью | 1988 |
|
SU1553507A1 |
| Захватное устройство | 1983 |
|
SU1181977A1 |

W
в-в
15
15
Фиг. 4
подернуто
Фаг.8
23
Фаг.Ю
