;1
Изобретение относится к автоматическим захватам, в частности к автоматическим захватам для тптучных грузов, уложенных на подкладках и т. п.
Известны автоматические захваты, включающие раму, вертикальные штанги, нодхватные лапы и нодвижную траверсу, соединенную с четырехтактным механизмом фиксации, обеспечивающим автоматическую работу захвата.
Предлагаемый автоматический захват отличается тем, что подхватпые лапы закреплены на нижних концах поворотных втулок, установленных на раме и имеющих винтовые пазы, а вертикальные штанги жестко соединены с подвижной траверсой и снабжены фиксирующими нальцами, перемещающим1И;Ся в пазах втулок для поворота последних. Это упрощает конструкцию и повышает надежносгь работы захвата.
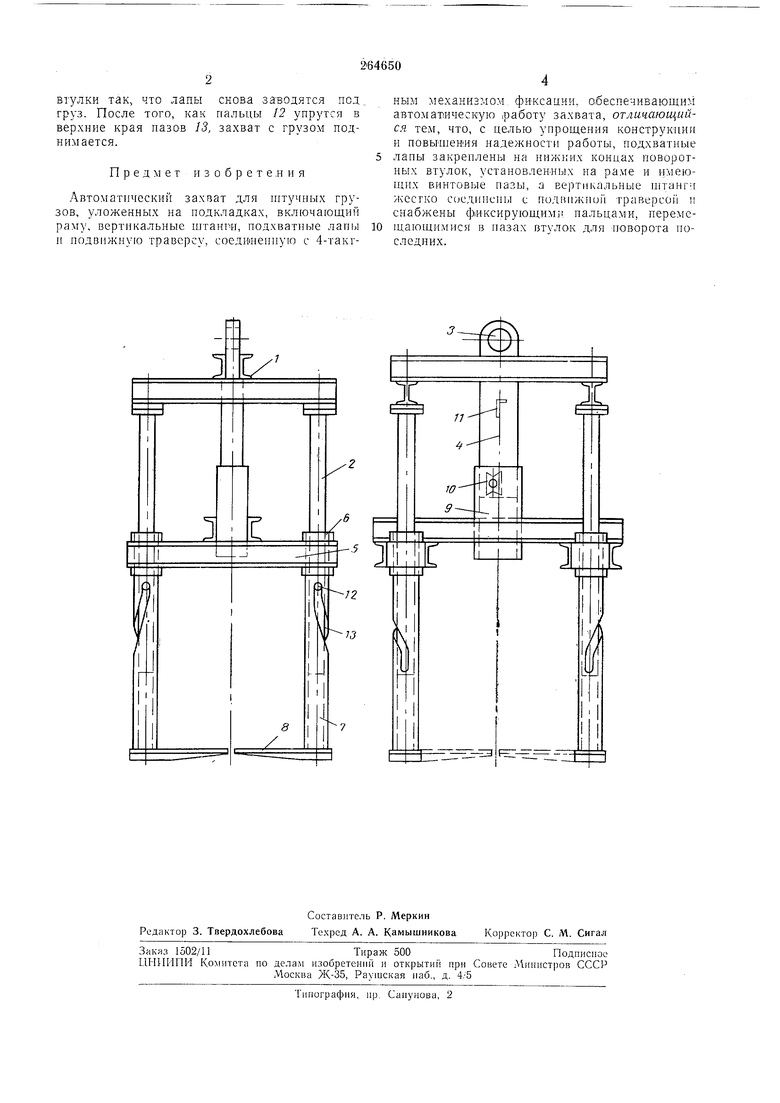
На чертеже схематически изображен описываемый захват в двух проекциях.
Траверса 1 снабжена, например, четырьмя вертикальными цилиндр.ическими штангами 2, петлей 3 для подвески к крюку грузо подъемного механизма (на чертеже не показан) и ползуном 4. Па раме 5 в подшипниках 6 установлены втулки 7, охватывающие штанги 2 и снабженные нодхватным1и лапами 8В средней части рамы закреплена пустотелая
стойка 9, охватываюп;ая ползун 4, с установленной в ней звездочкой 10. Звездочка совместно с упором //, ц.риваревным к нолзуну 4, и соответствующими прорезями в ползуне и стойке образует известный четырехтактный механизм фиксации. Па каждой штанге 2 установлен палец 12. входящий в винтовой паз 13, выполненный во втулке 7. При этом направления В1интовой линии пазов 13 в соседних втулках 7 различны.
В иоложении, показанном на чертеже, механизм фиксации разомкнут, траверса находится в верхнем положении, и иальцы 12 упираются в верхние края пазов 13. При этом втулки 7 расположены так, что лапы 8 находятся под грузом. Во время опускания захвата с грузом на грунт первоначально оста -1авливается рама с втулками и лапами. Траверса со штаигами под действим собственного веса продолжает опускаться, п пальцы разворачивают втулки так, что лапы выходят из-под груза. Когда захват поднимается, его элементы, зафиксироваппые механизмом фпксапии, остаются в том же полол ении, и захват снимается с груза. При оиускании захвата на другой груз механизм ф|иксации размыкается, и при дальнейшем подъеме траверса со штангами поднимается, а рама с втулками и лапами остается временно па грунте. При этОМ пальцы 12 разворачивают
втулки так, что лапы скова заводятся под груз. После того, как пальцы 12 упрутся в верхние края пазов 13, захват с грузом поднимается.
Предмет и в о б р е т е ,н и я
Автоматический захват для штучных грузов, уложенных па подкладках, включающий раму, вертикальные штанри, подхватные лапы и подвижную траверсу, соедипепиую с 4-такгным механизмом фиксации. 0:беспечивающим автомат1ическу о .работу захвата, отличающийся тем, что, с целью упропдения конструкции и повышения надежности работы, подхватные лапы закреплены на нижних концах поворотных втулок, установленных па раме и имеющих винтовые пазы, а вертикальные игтанги жестко сосдиисШ) с подвижной траверсой и снабжены фшксирующим::. нальцами, перемещающимися в цазах втулок для поворота последних.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для штучных грузов | 1976 |
|
SU557035A2 |
| Автоматический захват для штучных грузов | 1974 |
|
SU667482A2 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Автоматический захват | 1961 |
|
SU142740A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
