Изобретение относится к измерительной технике и может быть использовано для контроля геометрических араметров и остаточных напряжений ластин, в частности полупроводникоых.
Известно устройство для контроля геометрии изделий сложной формы, содержащее базовый стол, программный привод, датчик перемещений стола., аретку, модульную головку, блок регистрации сигналов
Недостатком устройства являются граниченные возможности. УстройствО| не позволяет измерять остаточные напряжения в изделиях, а также такие параметры как непараллельность или неплоскостность.,
Наиболее близким техническим решением к предлагаемому изобретении является устройство для контроля полупроводниковых пластин, содержащее подвижный базовый стол с приводом, связанный с базовым столом преобразователь линейных перемещений, подключенный к его выходу первым ходом блок обработки и индикации C2J .
Недостатком устройства является также его ограниченные возможности измерения геометрических параметров .(возможно только одностороннее измлрение координат реального профиля), а также невозможность определения остаточных напряжений в полупроводниковых образцах.
Целью -изобретения является расширение функциональных возможностей УJCтpoйcтвa.
поставленная цель достигается тем, что устройство для контроля полупроводниковых пластин, содержащее подвижный базовый стол с приводом, связанный с базовым столом преобразователь линейных перемещений, подключенный к его выходу первым входом блок обработки и индикации, снабжено опорным столом, установленным в , плоскости, эквидистантной поверхности базового стола, на сферическом шарнире и tpex подпружиненных аксиальных упорах, четырьмя измерителями смещения исходного положения опорного стола, измерителем прижимного усилия базового стола, узлом управления приводом, блок обработки и индикации выполнен в виде совокупности двух электронных преобразователей, узла коммутации, анализатора, ячейки памяти, двух сумматоров, ячейки запуска, узла коррекций, индикаторов отклонения от плоскос1ности,ТОЛЩИНЕ, отклонения от параллельностиj остаточного напряжения, выход первого электронного преобразователя связан с входами узла коммутации и анализа-тора, первый выход узла коммутации соединен с ячейками памяти, второй с индикатором толщины и вторыми входами первого сумматора и узла коррекции, выход ячейки памяти соединен с первым входом первого сумматора, связанного с индикатором отклонения от плоскостности, каждый из четырех выходов второго электронного преобра зователя связан с соответствующим входом второго сумматора, первый выход второго сумматора подключен к индикатору отклонения от параллельности, второй - к третьему узла коррекции, выход которого связан с индикатором остаточного напряжения, ячейка запуска связана с вторым входом узла коммутации, блок обработки и индикации имеет шесть вхо-: дов и два выхода, причем второй, тре тий, четвертый, пятый входы соедине-г ны с соответствующими входами второго электронного преобразователя и соответствующими измерителями смещения исходного положения опорного стола,шестой вход связан с первым входом узла коррекции и выходом измерителя прижимного усилия базового стола/ Первый выход соединен с выходом анализатора и первым входом узла управления приводом, второй - с выходом ячейки sianycKa и входом узла управления приводом, а первый вход блока обработки и индикации связан с входом п«рвого электронного преобразователя .
Кроме того, привод связан с базовым столсж через рычаг и толкатель, .толкатель выполнен в виде двух плун;керов, связанных между собой с помощью стержневого ограничителя с расположенной на нём пружиной, а измеритель прижимного усилия базового
стола кинематически связан с плунжерами толкателя.
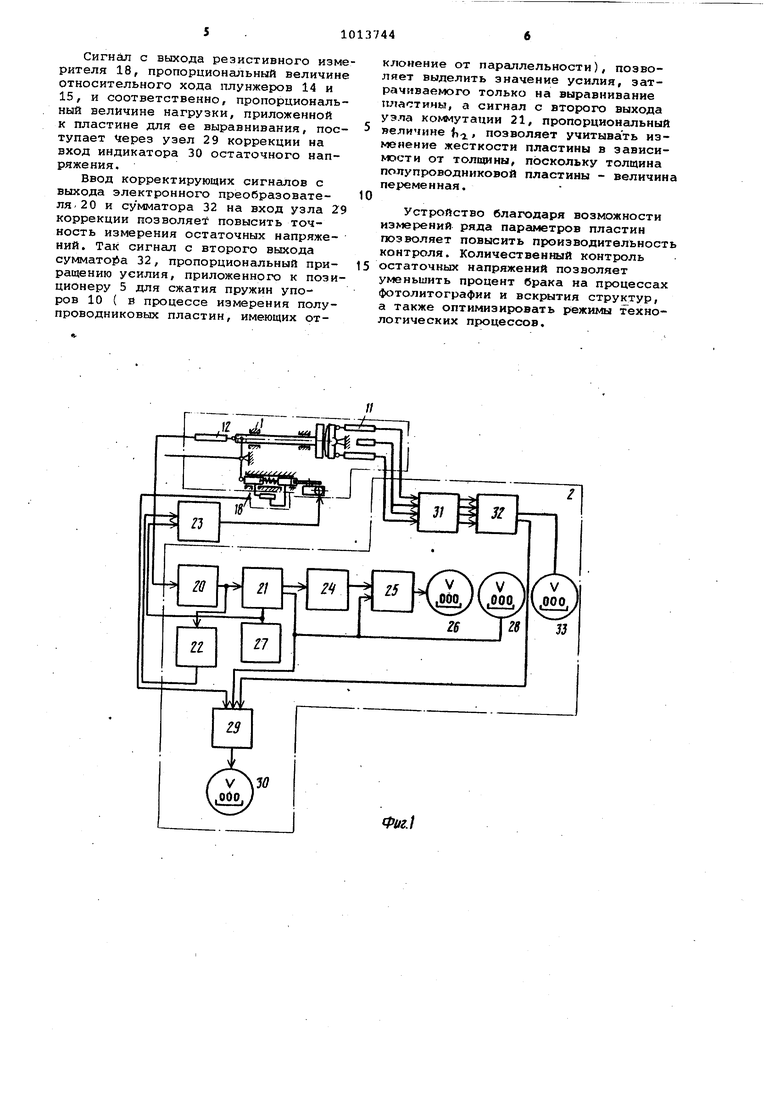
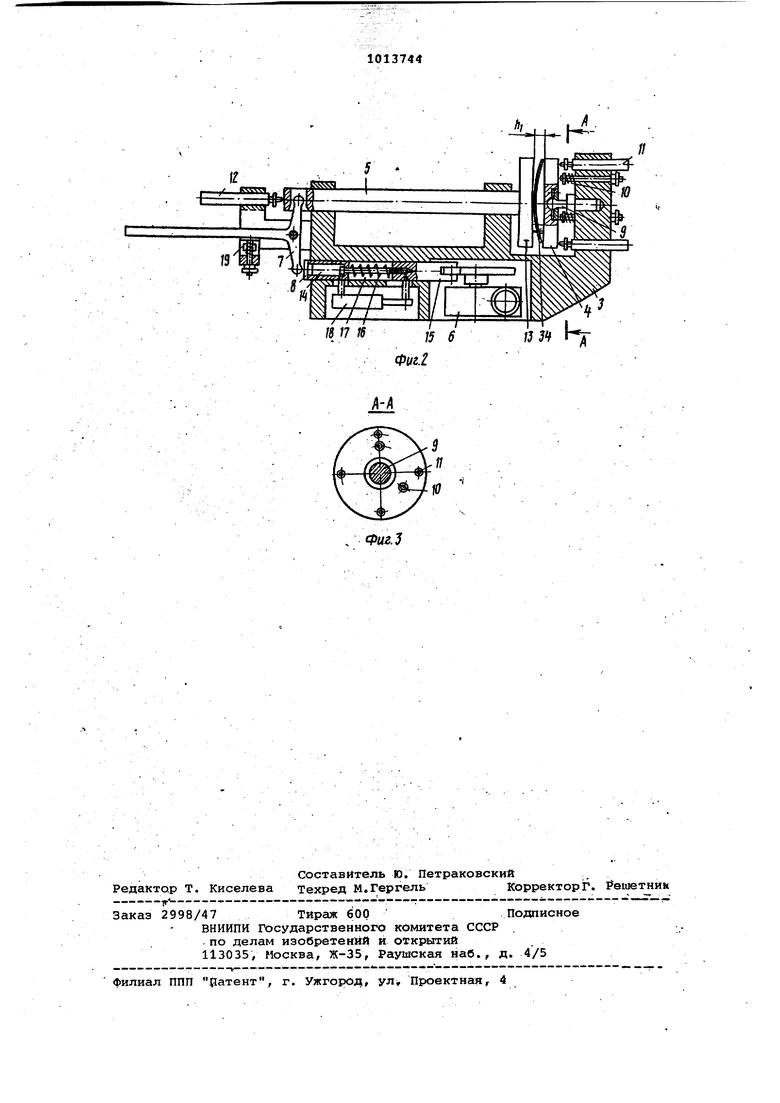
На фиг. 1 представлена блок-схема устройства; на фиг. 2 -механический узел, разрез; на фиг. 3 - разрез А-А на фиг. 2.
Основным узлами устройства являются механический узел 1 и блок 2 обработки и индикации (фиг. 1).
Механический узел Кфйг. 2) состоит из корпуса 3, опорного стола 4 и позиционера 5, кинематическое замыкание которого с приводом 6 выполнено посредством рычага 7 и толкателя 8. Опорный стол 4 зафиксирован в исходном положении ферическим шарниром 9 и тремя подпружинейными упорами 10 и взаимодействует с аксиально установленными измерителями 11 смещекик -ИСХОДНОГО положения опорного стола. Позиционер 5 со стороны рычага 7 взаймодействует с установленным вдоль его оси преобразователем 12 линейных перемещений и несет базовый стол 13.
Рабочая поверхность опорного стола 4. в исходном положении совпадает с плосйостью, эквидистантной плоскос ти базового стола 1-3, Толкатель 8 выполнен в виде плунжеров 14 и 15, между кото{ яйи размещена пружина 16. Взаимное исходное положение плунжеров зафиксировано стержневым огранич телем 17. Плунжеры 14 и 15 связаны между собой, например, резис ивным измерителе м 18 прижимного усилия бам зового стола. Исходное положение рычага 7 зафиксировано подпружиненны упором 19i Узлы взаимодействия рычаг с позиционером 5 и толкателем 8 выполнены с зазорами свободного хода {фиг. 2). Электронный блок 2 содержит первы электронный прео.бразователь 20, вход которого соединен с выходом преобразователя 12 линейных (eний, а выход - с входами узла 21 ко «лутацйи и анализатора 22, выход анализатора с первым входом узла 23 управления приводом 4. Первый выход узла 21 ком мутации соединен с входом ячейки 24 памяти, а выход ячейки памяти - с первым входом первого сулвлатора 25, выход которого соединен с входом индикатора 26 отклонения от плоскост ности. Управляющий вход узла 21 коммутации соединен с выходом ячейки. 27 запуска, а второй ныход - с вторым входом первого суишатора 25, входом индикатора 28 толщины и вторым входом узла 29 коррекции. Выход резистивного из - ерителя: 18 соединен с первым входом 29 кЬррекции, выход которого соединен с входом индикатора 30 остаточного напряжения контролируемой пластины. Выходы измерителей 11 положения опорного стола 4 через второй электронный пре образователь 31 соеданены с соответствующШДИ входами второго сумматора 32, первый выход которого соединен с входом индикатора-33 отклонения от параллельности, а второй выход с третьим входом узла 29 коррекции (фиг. 1 Устройство работает следуюицш образом. В исходном положении позиционер неисодится в крайнем положении, повер ности базового 13 и опорного 4 стсую соприкасаются, а сигналы на выходе электронных преобразователей 20,31 и резистивного. измерителя 18 имеют нулевое значение% Поворотом рычага 7, в пределах хода подпр5Гжиненного упора 19, баро вый стол 13 отводят от опорного 4 и в образующуюся между столами щель устанавливают полупроводниковую пластину 34. Рычаг 7 возвращают в исходное положение и позиционер 5 под действием усилия пружины преобразователя 12 базовым столом 13 прижимает пластину 34 к опорному столу 4. Для снижения погрешности изме-рения отклонения от плоскостности жесткость пружины преобразователя 12. устанавливается таким образом, чтобы . значение измерительного усилия пози-j ционера 5 не превышало.5 сН. Зазор свободного хода узла взаимодействия рычага 7 с позиционердм необходим для исключения влияния рычага 7 На формирование измерительного усилия , позиционера 5. . Аналоговый сигнал с. выхода перво-го электронного преобразователя 20, пропорциональный значению хода | , i позиционера 5 через узел 21 коммутации и ячейку 24 памяти поступнет на первый вход сумматора 25« Затем производят включение ячейки запуска и сигнал с ее выхода поступает на первый вход узла 23 управления приводом, запуская привод 6 силового перемещения -позиционера 5 и на управ-; лякжшй вход узла 21 коммутации, пе-j реключающий выход с ячейки 2А памяти на cyiiwaTOp 25, инд)1катор .28 и узел коррекции 29. Привод 6, взаинйздействуя, напри- .. мер при помощи кулачка, с плунжером 15, перемещает его в направлении плунжера 14, сккмая пружину 16, и соответственно,.нагружгш полупроводниковую .пластину 34 до полного ее выравнивания (фиг. 2). В момент остановки позиционера 5 после выравнивания пластины 34 прекращается возрастание сигнала на выходе электронг ного преобразователя 20, что обеспечивает формирование анализатором 22 Сигнала отключения питан1Ь| {Привода 6, поступающего на второй 23 управления. Аналоговый сигнал с выхода электронного преобразователя 20, пропорцнональный значению Ь , расстояния между столами 4 и-13, через узел 21- коммутации поступает на вторые входы сумлаго ра 25 к узла 29 коррекции. С выхода сумматора 25 сигнал, аналоговое значение которого соответствует разнос-, |ТИ величин ti - ti-i f поступает на бкод индикатора 26 отклонения от плоскостности. Одновременно аналоговый сигнал величины ij поступает на вход индикат ра 28 толпщны пластины в центральной части. Если полупроводниковая пластина имеет отклонение отпараллельности, опорный стол 4 откло|няется от исходного положения, воз- ; действуя на измерители 11. Сигналы : с выхода измерителей 11 через второй , |электроннцй преобразователь 31 nocTj - пают на входы сумматора 32. С первого выхода сумматора 32 результат изме- рения .поступает на вход индикатора 313 отклонения от..параллельности.
Сигнал с выхода резистивного измерителя 18, пропорциональный величине относительного хода плунжеров 14 и 15, и соответственно, пропорциональный величине нагрузки, приложенной к пластине для ее выравнивания, поступает через узел 29 коррекции на вход индикатора 30 остаточного напряжения.
Ввод корректирующих сигналов с выхода электронного преобразователя -20 и сумматора 32 на вход узла 29 коррекции позволяет повысить точность измерения остаточных напряжений. Так сигнал с второго выхода суммато 4а 32, пропорциональный приращению усилия, приложенного к позиционеру 5 для сжатия пружин упоров 10 ( в процессе измерения полупроводниковых пластин, имеющих отклонение от параллельности), позволяет выделить значение усилия, затрачиваемого только на выравнивание пластины, а сигнал с второго выхода узла коммутации 21, пропорциональный
величине |i, позволяет учитывать изменение жесткости пластины в зависимости от толщины, поскольку толщина полупроводниковой пластины - величина переменная.
Устройство благодаря возможности измерений ряда параметров пластин позволяет повысить производительность контроля. Количественный контроль
5 остаточных напряжений позволяет
уменьшить процент брака на процессах фотолитографии и вскрытия структур/ а также оптимизировать режимы технологических процессов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля геометрических параметров полупроводниковых пластин | 1982 |
|
SU1048305A1 |
| Устройство для контроля геометрических параметров полупроводниковых пластин | 1982 |
|
SU1106983A1 |
| Устройство для контроля изгиба полупроводниковых пластин | 1981 |
|
SU1111023A1 |
| Способ контроля отклонения формы полупроводниковых пластин | 1986 |
|
SU1394029A1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| Цифровой термометр | 1982 |
|
SU1059448A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОТЕНЦИАЛОВ ПОДЗЕМНОГО СООРУЖЕНИЯ | 2012 |
|
RU2513666C2 |
| Система автоматического управления кривошипным прессом | 1979 |
|
SU1037997A1 |
| Устройство для измерения геометрических параметров полупроводниковых пластин | 1989 |
|
SU1763873A1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2005 |
|
RU2296962C1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН, содержащее подвижный базовый стол с приводом, связанный с базовым столом преобразователь линейных перемещений, подключенный к его выходу первым входом блок обработки и индикации, отличающееся тем, что, с целью расширения- функциональных зоз можностей, оно снабжено опорным столом, установленным в плоскости, эквидистантной gnoBepxHocTH базового стола,-на сферическом шарнире и трех подпружиненных аксиальных упорах, . четырьмя измерителями смещения исходного положения опорного стола, измерителем прижимного усилия базо- . вого стола, узлом управления приводом, блок обработки и индикации выполнен в виде совокупности двух электронных преобразователей, узла коммутации, анализатора, ячейки памяти, двух сумматоров, ячейки запуска, узла коррекции, индикаторов отклонения от плоскостности, толщины, отклонения от параллельности, и остаточного . напряжения, выход первого электронного преобразователя связан с входами узла коммутации и анализатора, первый выход узла коммутации соеди|нен с ячейкой памяти, второй - с индикатором толщины и вторыми входами первого сумматора и узла коррекции, выход ячейки памяти соединен с первым входом, первого сумматора, связанного с индикатором отклонения от плоскостности, каждЕЛй из четырех выходов второго электронного преобразователя связан с соответствующим входом второго сумматора, первый выход второго сумматора подключен к индикатору отклонения от параллельности, второй - к третьему входу узла коррекции, выход которого связан с индикатором остаточного напряжения, ячейка запуска связана с вторым вхо дом узла коммутации, блок обработки и индикации имеет шесть входов и два выхода, причем второй, третий, четвертый, пятый входы соединены с (Л соответствующими входами второго. Электронного преобразователя и соответствующими измерителями смещения ИСХОДНОГО положения опорного стола,10 «Ьстой вход связан с первым входом узла коррекции и выходом измерителя прижимного усилия базового .стола, ;первый выход соединен с выходом ана-. лизатора и первым входом узла управления приводом, второй - с выходом ячейки, запуска и вторым входом уз00 ла управления приводом, а пёр1ВЫЙ вход блока обработки и виндикации связан с входом 4 4 первого электронного преобразователя. 2. Устройство по п. 1, отличающееся тем, что привод связан с базовым столом через рычаг . . и толкатель, толкатель выполнен в виде двух плунжеров, связанных между ::обой с помощью стержневого ограничителя с расположенной на нем пружиной, а измеритель прижимного усилия базового стола кинематически связан с плунжерами толкателя.
18 17 №
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТОМАТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЙ | 0 |
|
SU328330A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ВНУТРИСКВАЖИННЫЙ ИНСТРУМЕНТ СБРОСА ПРОБКИ | 2012 |
|
RU2614824C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
