го соединен с входом формирователя команды разбраковки результата измерения отклонения от параллельно10it8305сти,, управляющий вход узла коммутации соединен с управляющим выходом узла управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля изгиба полупроводниковых пластин | 1981 |
|
SU1111023A1 |
| Устройство для контроля геометрических параметров полупроводниковых пластин | 1982 |
|
SU1106983A1 |
| Устройство для измерения геометрических параметров полупроводниковых пластин | 1989 |
|
SU1763873A1 |
| Устройство для контроля полупроводниковых пластин | 1981 |
|
SU1013744A1 |
| Способ контроля отклонения формы полупроводниковых пластин | 1986 |
|
SU1394029A1 |
| Электроконтактный датчик | 1988 |
|
SU1633259A2 |
| ФОРМИРОВАТЕЛЬ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2304807C1 |
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1989 |
|
SU1675655A1 |
| Устройство для отделения листа от стопы | 1986 |
|
SU1524958A1 |
| Устройство проекционного экспонирования промежуточных фотооригиналов | 1984 |
|
SU1267343A1 |

Изобретение относится к измерительной технике и может быть использовано в приборостроительной промышленности для контроля толщины отклонения от параллельности и от плоскостности полупроводниковых пластин.
Известно устройство для контроля толщины полупроводниковых пластин, содержащее измерительную стойку с . предметным столом и держателем измерителя. В качестве измерителя обычно используют индикатор часового типа или оптический длиномер L 1 D.
Недостаток этого устройства - невозможность измерения.изгиба (отклонения от плоскостности) полупроводниковых пластин..
Наиболее близким к предлагаемому является устройство для контроля геометрических параметров полупроводниковых пластин, содержащее предметный стол с базовыми опорами, измеригтель и тарированный гравитационный толкатель с .траверсой, сферические наконечники которых установлены оппозитно и соосно, базовые опоры выполнены в виде датчиков касания, подключенных к анализатору базирования, выход которого соединен с управляющим входом узла коммутации, информационный вход последнего соединен с выходом электронного преобразователя, входом соединенный с выходом измерителя 2 },
Однако с помощью известного устройства возможен контроль только одного геометрического параметра полупроводниковых пластин.
Цель изобретения - расширение функциональных возможностей устройства (комплексного контроля нескольких параметров пластин).
Поставленная цель достигается тем, что в устройстве для контроля геометрических параметров полулроводниковых пластин, содержащем предметный стол с базовыми опорами, изме ритель и тарированный гравитационный толкатель с траверсой, сферические наконечники которых установлены оппозитно и соосно, базовые опоры выполнены в виде датчиков касания, 5 подключенных к анализатору базирования, выход анализатора базирования срединен с управляющим входом узла коммутации, информационный вход последнего соединен с выходом
электронного преобразователя, вход которого,соединен с выходом измерителя, тарированный гравитационный толкатель выполнен с микрометричесКИМ винтом, взаимодействующим с упо5 ром положения, рычаг перемещения тарированного гравитационного толкателя выполнен в виде ведущего и ведо мого звеньев, взаимодействие которых в исходном положении ограничено
0 подпружиненным упором, а узел взаимодействия наконечника ведомого звена с тарированным гравитационным толкателем выполнен с зазором свобод ного хода, предметный стол выполнен
5 с двумя дополнительными опорами выше и двумя дополнительными опорами ниже уровня базовых опор, опорная точка сферического наконечника тарированного гравитационного толкателя
0- в его крайнем нижнем положении совпадает с плоскостью, проходящей через точки касания базовых опор, угюр положения в сочетании с наконечником микрометрического винта тариро5 ванного гравитационного толкателя составляет электроконтактный датчик, устройство снабжено дополнительным узлом коммутации, узлом управления, формирователями команд разбраковки
0 текущих результатов измерений параметров, узлами памяти, сумматором, выход электроконтактного датчика соединен с управляющим входом дополнительного, узла коммутации i и узла
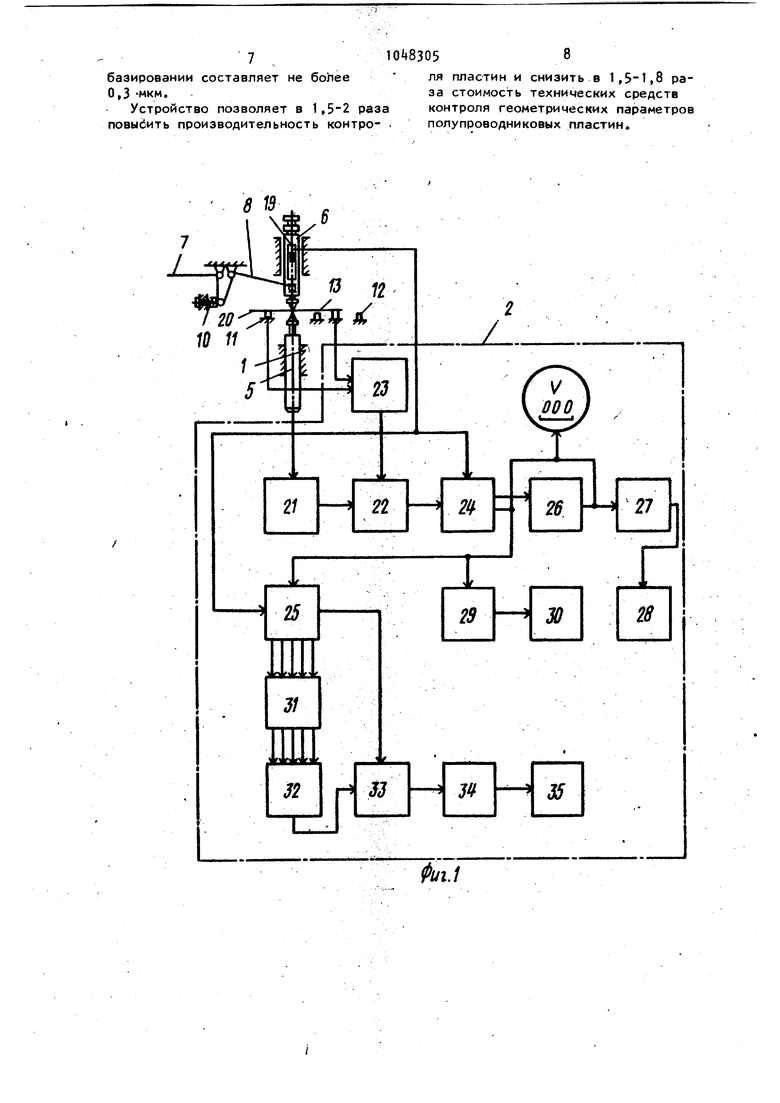
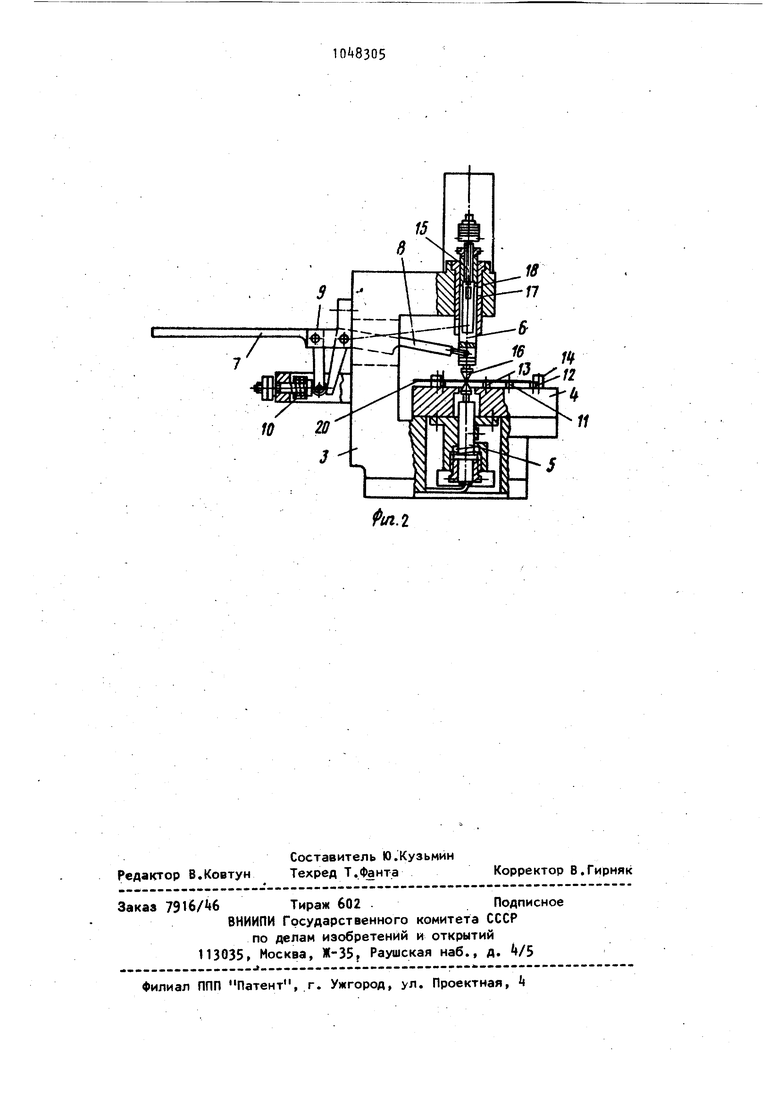
5 управления, первый выход дополнительного узла коммутации соединен с входом ячейки памяти результата измерения отклонения от плоскостности, второй выход - с информационным входом узла управления и входом .формирователя команды разбраковки, текущего результата измерения толщи ны, информационные выходы узла управления через ячейки узла памяти соединены с соответствующими входами сумматора, выход сумматора соединен с информационным входом узла коммутации, выход которого соединен с входом формирователя команды разбраковки результата измерения отклонения от параллельности, управляющий вход узла коммутации соединен с управляющим выхо дом узла управления. На фиг. 1 показана схема устройства; на фиг., 2 - кинематическая схема манипулятора. Устройство для контроля геометри ческих параметров полупроводниковых пластин состоит из манипулятора 1 и электронного блока 2. Манипулятор 1 состоит из корпуса 3 предмет ного стола.4, измерителя 5, тарированного гравитационного толкателя 6 укрепленных в корпусе 3, ведущего 7и ведомого 8 звеньев, рычага 9 и подпружиненного упора 10, также соединенный с корпусом 3. Узел взаимодействия наконечника ведомого звена 8 с гравитационным толкателем 6 выполнен с зазором свободного ход ведущее звено прижимается к подпружиненному упору 10. Предметный стол снабжен тремя базовыми опорами 11 выполненными в виде датчиков касания, двумя дополнительными опорами 12, расположенными выше уровня базо вых опор, и двумя дополнительными опорами 13 ниже уровня базовых опор 11. Вблизи предметного стола установлены фиксаторы 14 ориентации. Тарированный гравитационный толкатель 6 снабжен микрометрическим вин том 15 и сферическим наконечником 1б. В продольный паз гравитационного толкателя 6 входит траверса 17, выполненная из диэлектрического материала и снабженная плоским упором .18 положения, составляющим со сфери ческим наконечником 16 микрометрического винта 15 электроконтактиый датчик 19. На предметный стол k пом щается измеряемая полупроводниковая пластина 20. Электронный блок 2 состоит из электронного преобразователя 21, вход которого соединен с выходом из мерителя 5, а выход - с информационным входом узла 22 коммутации, анализатор 23 базирования, вход которого соединен с выходами датчиков касания базовых опор 11, а выход - с управляющим входом узла 22 коммутации. Управляющий вход дополнительного узла 2k коммутации соединен с выходом электроконтактного датчика 19и управляющим входом узла 25 управления. Первый выход узла 2 коммутации посредством узла 2б памяти и формирователя 27 команды соединен с сигнализатором 28 разбраковки отклонения от плоскостности, а второй выход узла 2k коммутации соединен через формирователь 29 команды с сигнализатором 30 разбраковки текущего значения толщины и с информационным входом узла 25 управления. Информационные выходы узла 25 управления через узлы 31 памяти соединены с соответствующими входами сумматора 32. Выход сумматора 32 через информацион ный вход узла 33 коммутации и формирователь 3 команды соединен с сигнализатором 35 разбраковки отклонения от параллельности. Управлящий вход узла 33 коммутации соединен с управляющим выходом узла 25 управления. Устройство работает следующим образом. Нажатием на горизонтальное плечо ведущего звена 7 рычага 9 посредством ведомого звена 8 производят подъем гравитационного толкателя 6, на предметный стол k укладывают полупроводниковую пластину 20, возвра щением ведущего звена 7 в.исходное положение опускают гравитационный толкатель 6 на полупроводниковую . пластину 20. Зазор свободного хода между сферическим наконечником ведомого звена 8 и ответным отверстием гравитационного толкателя 6 исключает влияние массы ведомого звена 8 на работу микросилоаого компаратора. После касания пластиной 20третьей базовой опоры 11 сигнал с выхода анализатора 23 базирования поступает на управляющий вход узла 22 коммутации, который отключает выход электронного преобразователя 21. Аналоговый сигнал, поступивший с .выхода электронного преобразователя 21, через узлы 22 и 2k коммутации поступает в узел 26 памяти.
a с его выхода - на вход формирователя 27 команды разбраковки. С выхода формирователя 27 сигнал команды разбраковки поступает на вход сигнализатора 28 результатов контро ля отклонения от плоскостности.
Затем посредством рычага 9 приподнимают гравитационный толкатель 6, и контролируемую пластину 20 перемещают в другую позицию. В этой позиции полупроводниковая пластина опирается только на одну базовую опору 11. Дополнительные опоры 13 ограничивают полупроводниковые пластины 20 от недопустимого перекоса. Гравитационный толкатель 6 опускается в крайнее нижнее положение, фиксируемое упором 18 положения, три этом опорная точка сферического наконечника 16 гравитационного толкателя & совмещается с плоскостью, проходящей через точки касания базовых опор 11, и сферический наконечник 16 выполняет функцию базовой опоры для измерения толщины полупроводниковой пластины 20.
Микросиловой, компаратор в результате взаимодействия гравитационного толкателя 6 с подпружиненным измерительным стержнем иакюрителя 5 обеспечивает формирование результирующего усилий базирования только в пределах поля измерения отклонения от плоскостности (около 300 Мкм), триботехничёскйе условия взаимодействия элементов микросилового компаратора не позволяют обеспечить необходимое усилие взаимодействия наконечника микрометрического винта 15 с упором 18 положения.Для ёспечения гарантированной фиксации гр витационного толкателя 6 в крайнем нижнем положении производят поворот ведущего звена 7 рычага 9 в направлении сжатия подпружиненного упора 10, освобождая от фиксации в исходном положении ведомое звено 8. В результате ведомое звено 8 поворачивается и при помощи наконечника создает дополнительный нагружающий фактор гравитационного толкателя 6, обеспечивая необходимое усилие кон.такта. В момент касания наконечником упора 18 положения сигнал с выхода электроконтактного датчика 19 поступает на управляющий вход дополнительного узла 2k коммутации и узла 25 управления. Узел 2 коммутаци переключает выход, и сигнал с электронного преобразователя 21 через узлы 22 и коммутации поступает на вход формирователя 29 команды разбраковки и информационный вход узла 25 управления. Сигнал команды разбраковки с выхода формирователя
29поступает на вход сигнализатора
30разбраковки результата контроля толщины полупроводниковой пластины 20 в центральной зоне. Одновременно аналоговый сигнал первого измерения толщины с первого информационного выхода через одну ячейку узла 31 памяти поступает на соответствующий вход сумматора 32. гравитацион ный толкатель 6 приподнимают и полупроводниковую пластину 20 перемещают в следующую позицию. В этой позиции полупроводниковая пластина 20 опира ется также на одну базовую опору
11 и ограничивается:от недопустимого перекоса дополнительными опора ми 12, расположенными выше уровня базовых опор.
Измерение производится аналогично предыдущей операции, т.е. сигнал с выхода электронного преобразователя 21 через узлы 22 и 2А коммутации поступает на вход формирователя 29 команды разбраковки, а с выхода формировате.пя 29 сигнал команды разбраковки поступает на вход сигнализатора 30 результате контроля толщины в данной периферийной точке. Одновременно сигнал с электроконтактного датчика 19 поступает на управляющий вход узла 25 управления, обеспечивая переключение информационных выходов на соответствующую ячейку узла 31 памяти
Поворачивая пластину 20, производят измерение ее толщины в остальных периферийных точках. После зат полнения всех ячеек узла 31 памяти с управляющего выхода узла 25 управления на управляющий вход, узла 33, коммутации, подается сигнал команды включения. Сигнал с выхода сумматора 32 через информационный канал узла 33 коммутации и формирователь З команды поступает на вход сигнализатора 35 разбраковки результата контроля отклонения от параллельности. Отклонением от параллельности является разность между максимальным и минимальным значениями результатов .измерения толщины в заданных точках. Погрешность измерения толщины в результате перекоса пластины 20 при
базировании составляет не боЬее 0,3 МКМ,
Устройство позволяет в 1, раза повыбить производительность контро- .
ля пластин и снизить в 1,5-1,8 раза стоимость технических средств контроля геометрических параметров полупроводниковых пластин.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бочкин О.И | |||
| и др | |||
| Механическая обработка полупроводниковых материалов | |||
| М., Высшая школа, 1973, с | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| БИБЛИОТЕКА I | 0 |
|
SU327262A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
