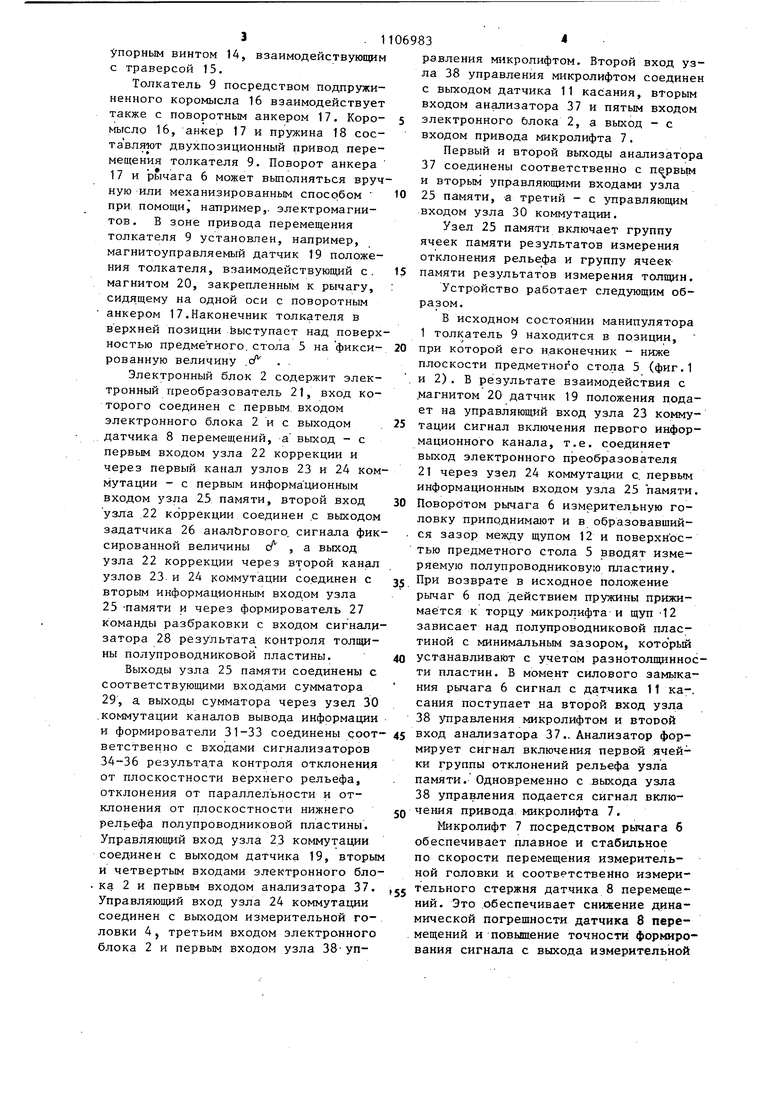
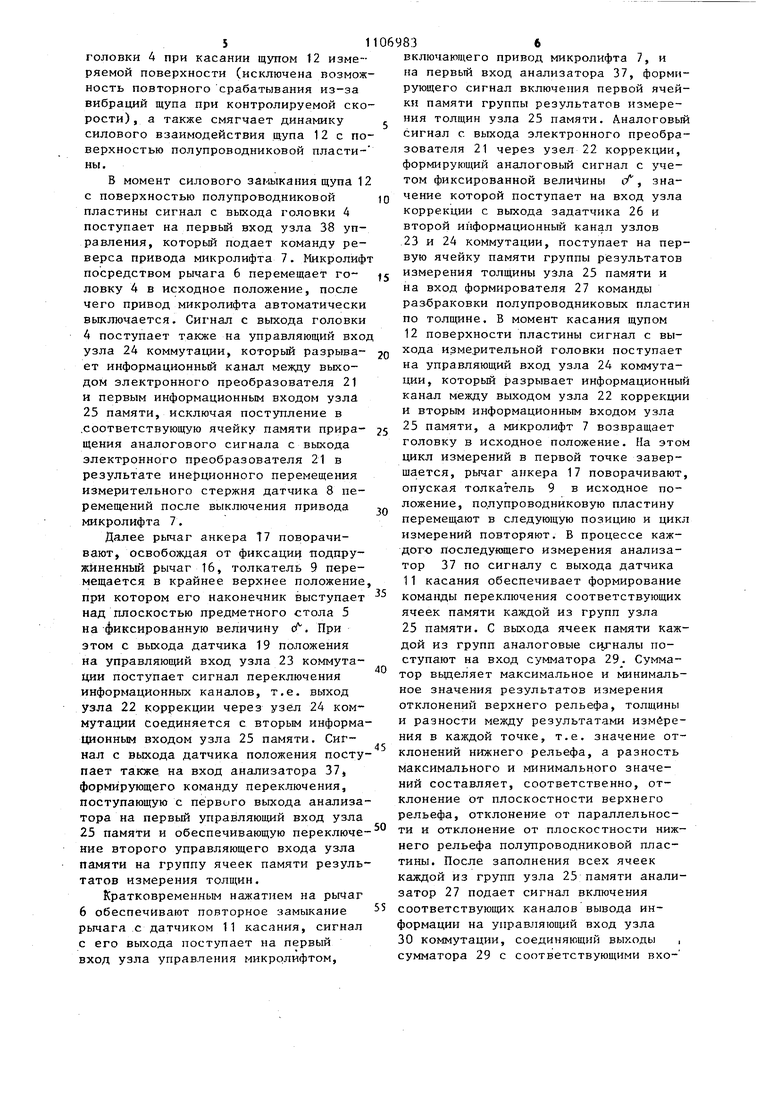
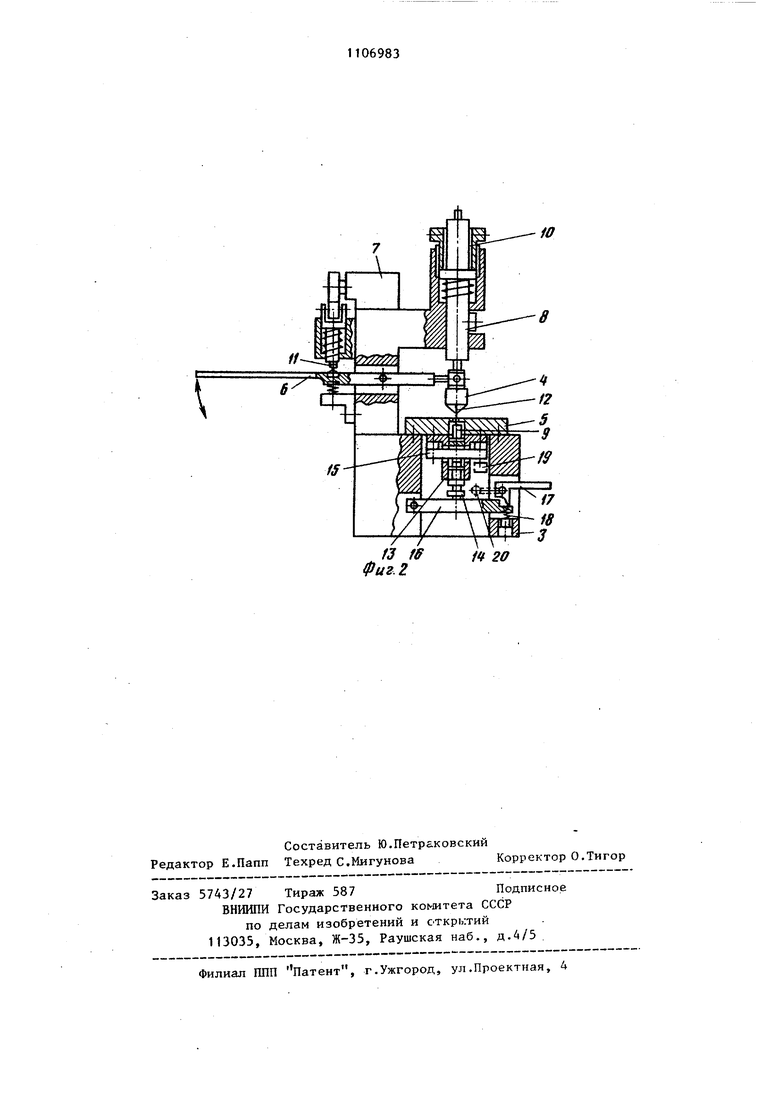
Изобретение относится к измерительной технике и может быть использовано для контроля контактным методом легкодеформируемых (пластичных) полупроводниковых пластин произвольной конфигурации. Известно устройство для контроля деталей сложной формы, содержащее ос нование с. измерительными щупами-, датчик-перемещения, счетчик, логические элементы, сумматор, индикатор J. НедостаткЪм устройства являются значительные усилия, прикладываем1 1е к измеряемым деталям,- что не позволя ет измерять легкодеформируемые детали, например, полупроводниковые пластины. Наиболее близким техническим решением к предлагаемому является устройство для контроля полупроводниковь1х пластин, содержащее манипулятор, включающий установленные оппозитло и соосно измерительную головку с датчиком перемещений и толкатель, предмет ньй стол, рычаг операционных перемещений, кинематически связанньй с измерительной головкой, электронный блок, первый вход которого подключен к датчику перемещений С 2. Недостатком известногр устройства являются ограниченные функциональные возможности (контролируется только один параметр), а такженевозможность контроля полупроводниковых пластин про1 звольной конфигурации. Кроме того, при измерении полупроводниковых пластин, вьшолненных из лeгкoдeфop мруемых полупроводниковых материалов (например, рартворов), происходит дефор1мация поверх;ности пластин в результате воздействия наконечников подпружиненного измерительного стержня датчика перемещений и толкателя (минимальное значение усилия равно . 40,.,60 сН). Цель изобретения - повышение точ ности измерений и расширение функциовальных возможностей устройства. Поставленная целль достигается тем что в устройстве для контроля геометрических параметров полупроводнйковых пластин, содержащем манипулятор,включающий установленные опдозитно и соосно измерительную головку с датчиком перемещений и толкатель, предметный стол, рьиаг операционных перемещеНИИ, кинематически связанный с измерительной головкой, электронный блок первьп вход которого подключен к 1 3 датчику перемещений, предметный стол выполнен плоским и имеет центральное отверстие, соосное толкателю, толкатель выполнен с возможностью двухпозиционногоперемещения, манипулятор снабжен датчиком положения толкателя, кинематически связанным с толкателем и подкл}оченным к второму и четвертому входам электронного блока, .микролифтом, кинематически связанным с рычагом операционных перемещений, дат-чиком касания, установленным на торце выходного элемента микролифта, устройство снабжено узлом управления микролифтом, первый вход которого подключен к датчику касания и пятому входу электронного блока, выход - к приводу микролифта, измерительная головка выполнена с сигнализатором Наличия контактирования с измеряемойдеталью, подключенным к второму входу узла Упра1вления микролифтом и третьему входу электронного блока, а измерительный стержень измерительной головки выполнен в виде гибкого щупа. На фиг.1 представлена структурная схема устройства; на фиг,2 - манипу-лятор, общий вид, Устройство содержит манипулятор 1, злектронньш блок 2 (фиг.1-). В CBOJO очередь манипулятор (фиг, 1-й 2) включает основание 3, измерительную головку 4, предме тный стол 5, рычаг 6 операционных перемещений и микролифт 7, Измерительная головка 4 связана с датчиком 8 перемеЕ1ений, оппозитнЪ и соосно измерительной головке 4 установлен толкатель 9, с датчиком 8 связан механизм 10 настройки положения датчика перемещений. Микролифт 7 в выключенном состоянии вьшолняет роль ограничителя исходного положения рычага 6 операционных перемещений. На торце выходного элемента микролифта 7 установлен датчик 11 касания. Измерительная головка имеет измерительньш стержень 12, выполненный в -виде гибкого, щупа. Щуп 12 выполняет роль сигнализатора.наличия контактирования с измеряемой пластиной, Наконечники щупа и толкателя- выполнены сферическими. Предметный стол 5 выполнен плоским и имеет центральное отверстие для выходанаконечника толкателя 9, которьй установлен с возможностью перемещения в- отверстии втулки 13 и снабжен микрометрическим Упорным винтом 14, взаимодействующим с траверсой 15, Толкатель 9 посредством подпружиненного коромысла 16 взаимодействует также с поворотным анкером 17. Коромысло 16, анкер 17 и пружина 18 составлятот двухпозиционный привод перемещения толкателя 9. Поворот анкера 17 и рычага 6 может вьшолняться вруч ную или механизированным способом при помощи, например,, электромагнитов. В зоне привода перемещения толкателя 9 установлен, например, магнитоуправляемый датчик 19 положения толкателя, взаимодействующий с. магнитом 20, закрепленным к рычагу, сидящему на одной оси с поворотным анкером 17.Наконечник толкателя в верхней позиции выступает над поверх ностью предметного, стола 5 на фиксированную величину .с . . Электронный блок 2 содержит электронный преобра-зователь 21, вход которого соединен с первым входом электронного блока 2 и с выходом датчика 8 перемещений, а выход - с первым входом узла 22 коррекции и через первый канал узлов 23 и 24 ком мутации - с первым информационным входом узла 25 памяти, второй вход узла 22 коррекции соединен с выходом задатчика 26 аналогового, сигнала фик сированной величины сЛ , а выход узла 22 коррекции через второй канал узлов 23. и 24 }соммутации соединен с вторым информационным входом узла 25 -памяти и через формирователь 27 команды разбраковки с входом сигнали затора 28 результата контроля толщины полупроводниковой пластины. Выходы узла 25 памяти соединены с соответствующими входами сумматора 29, а выходы сумматора через узел 30 .коммутации каналов вывода информадаи и формирователи 31-33 соединены COOT ветственно с входами сигяализаторрв 34-36 результата контроля отклонения от плоскостности верхнего рельефа, отклонения от параллельности и отклонения от плоскостности нижнего рельефа полупроводниковой пластины. Управляющий вход узла 23 коммутации соединен с выходом датчика 19, вторы и четвертым входами электронного бло ка 2 и первым входом анализатора 37. Управляющий вход узла 24 коммутации соединен с выходом измерительной головки 4, третьим входом электронного блока 2 и первым входом узла 38уп. 1 3 равления микролифтом. Второй вход узла 38 управления микролифтом соединен с выходом датчика 11 касания, вторым входом анализатора 37 и пятым входом электронного блока 2, а выход - с входом привода микролифта 7. Первый и второй выходы анализатора 37соединены соответственно с первьм и вторым управляющими входами узла 25 памяти, а третий - с управляющим входом узла 30 коммутации. Узел 25 памя.ти включает группу ячеек памяти результатов измерения отклонения рельефа и группу ячеек памяти результатов измерения толщин. Устройство работает следующим образом. В исходном состоянии манипулятора 1 толкатель 9 находится в позиции, при которой его наконечник - ниже плоскости предметного стола 5 (фиг.1 и 2). Б результате взаимодействия с магнитом 20 датчик 19 положения додает на управляющий вход узла 23 коммутации сигнал включения первого информационного канала, т.е. соединяет выход электронного преобразователя 21 через узел 24 коммутации с. первь 1м информационным входом узла 25 памяти. Поворотом рычага 6 измерительную головку приподнимают и в образовавшийся зазор между щупом 12 и поверхностью предметного стола 5 вводят измеряемую полупроводниковую пластину. При возврате в исходное положение рычаг 6 под действием пруткины прижимается к торцу микролифта и щуп -12 зависает над полупроводниковой пластиной с минимальным зазором, который устанавливают с учетом разнотолщинности пластин. В момент силового замыкания рычага 6 сигнал с датчика 11 ка-, сания поступает на второй вход узла 38управления микролифтом и второй вход анализатора 37.. Анализатор формирует сигнал включения первой ячейки группы отклонений рельефа узла памяти. Одновременно с .выхода узла 38 управления подается сигнал включения привода микролифта 7. Микролифт 7 посредством рычага б обеспечивает плавное и стабильное по скорости перемещения измерительной головки и соответственно измерительного стержня датчика 8 перемещений. Это .обеспечивает снижение динамической погрешности датчика 8 пере- мещений и повмцение точности формиро вания сигнала с выхода измерительной головки 4 при касании щупом 12 измеряемой поверхности (исключена возмож ность повторного срабатывания из-за вибраций щупа при контролируемой ско рости) , а также смягчает динамику силового взаимодействия щупа 12 с по верхностью полупроводниковой пластины, в момент силового замыкания щупа 1 с поверхностью полупроводниковой пластины сигнал с выхода головки А поступает на первый вход узла 38 управления, которьй подает команду реверса привода микролифта 7. Микролиф посредством рычага 6 перемещает головку 4 в исходное положение, после чего привод микролифта автоматически выключается. Сигнал с выхода головки 4 поступает также на управляющий вхо узла 24 коммутации, которьй разрывает информационный канал между выходом электронного преобразователя 21 и первым информационным входом узла 25 памяти, исключая поступление в .соответствующую ячейку памяти приращения аналогового сигнала с выхода электронного преобразователя 21 в результате ине{)ционного перемещения измерительного стержня датчика 8 перемещений после выключения привода микролифта 7. Далее рычаг анкера 17 поворачивают, освобождая от фиксации -подпружиненный рычаг 16, толкатель 9 перемещается в крайнее верхнее положение при котором его наконечник выступает над плоскостью предметного стола 5 на биксированную величину с. При этом с выхода датчика 19 положения на управляющий вход узла 23 коммутации поступает сигнал переключения информационных каналов, т.е. выход узла 22 коррекции через узел 24 коммутации соединяется с вторым информа ционным входом узла 25 памяти. Сигнал с выхода датчика положения посту пает также на вход анализатора 37 формирующего команду переключения, поступающую с первого выхода анализа тора на первый управляющий вход узла 25 памяти и обеспечивающую переключе кие второго управляющего входа узла памяти на группу ячеек памяти резуль татов измерения толщин. Кратковременным нажатием на рычаг 6 обеспечивают повторное замыкание рычага с датчиком 11 касания, сигнал с его выхода поступает на первый вход узла управления микролифтом. включающего привод микролифта 7, и на первый вход анализатора 37, формирующего сигнал включе}1ия первой ячейки памяти группы результатов измерения толщин узла 25 памяти. Аналоговый сигнал с выхода электронного преобразователя 21 через узел 22 коррекции, формирующий аналоговый сигнал с учетом фиксированной величины (/, значение которой поступает на вход узла коррекции с выхода задатчика 26 и второй ийформационньй канал узлов 23 и 24 коммутации, поступает на первую ячейку памяти группы результатов измерения толщины узла 25 памяти и на вход формирователя 27 команды разбраковки полупроводниковых пластин по толщине. В момент касания щупом 12 поверхности пластины сигнал с выхода измерительной головки поступает на управляющий вход узла 24 коммутации, которьй разрывает информационный канал между выходом узла 22 коррекции и вторым информационным Входом узла 25 памяти, а микролифт 7 возвращает головку в исходное положение. На этом цикл измерений в первой точке завершается, рычаг анкера 17 поворачивают, опуская толкатель 9 в исходное положение, полупроводниковую пластину перемещают в следующую позицию и цикл измерений повторяют. В процессе каждого последующего измерения анализатор 37 по сигналу с выхода датчика 11 касания обеспечивает формирование команды переключения соответствующих ячеек памяти каждой из групп узла 25 памяти. С выхода ячеек памяти каждой из групп аналоговые сигналы поступают на вход сумматора 29. Сумматор выделяет максимальное и минимальное значения результатов измерения отклонений верхнего рельефа, толщины и разности между результатами измерения в каждой точке, т.е. значение отклонений нижнего рельефа, а разность максимального и минимального значений составляет, соответственно, отклонение От плоскостности верхнего ельефа, отклонение от параллельности и отклонение от плоскостности нижнего рельефа полупроводниковой пластины. После заполнения всех ячеек аждой из групп узла 25 памяти аналиатор 27 подает сигнал включения оответствующих каналов вывода инормации на управляюпшй вход узла 0 коммутации, соединяющий выходы , сумматора 29 с соответствующими входами формирователей 31-33. Команды разбраковки с формирователей 31-33 поступают на вход сигнализаторов 3436 групп разбраковки отклонения от плоскостности верхнего решьефа, отклонения от параллельности и отклонения от плоскостности нижнего рельефа полупроводниковой пластины. На этом цикл измерения геометрических
параметров полупроводниковой пластины завершается.
При необходимости при помощи показывающих приборов (например, цифровых вольтметров) можно индицировать цифровое значение результатов измерения в каждой точке и по каждому параметру.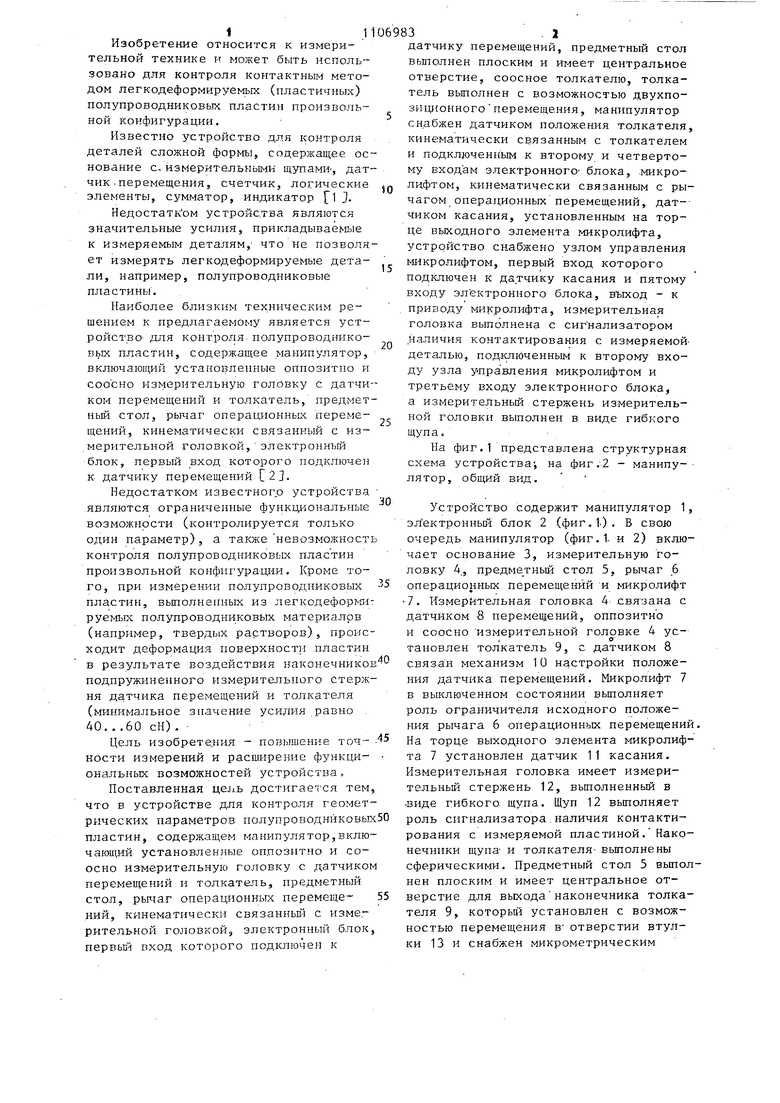
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля изгиба полупроводниковых пластин | 1981 |
|
SU1111023A1 |
| Устройство для контроля геометрических параметров полупроводниковых пластин | 1982 |
|
SU1048305A1 |
| Устройство для контроля полупроводниковых пластин | 1981 |
|
SU1013744A1 |
| Устройство для измерения геометрических параметров полупроводниковых пластин | 1989 |
|
SU1763873A1 |
| Установка для ультразвуковой микросварки и контроля соединения | 1988 |
|
SU1540986A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1972 |
|
SU332520A1 |
| Устройство для управления положением сварочной головки | 1988 |
|
SU1613265A1 |
| Устройство для измерения напряженности электрического поля | 1984 |
|
SU1239649A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА (КИМ) | 2005 |
|
RU2307321C2 |
| Способ контроля отклонения формы полупроводниковых пластин | 1986 |
|
SU1394029A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН, содержащее манипулятор, включающий установленные оппозитно и соосно измерительную головку с датчиком перемещений и толкатель, предметный стол, рычаг операционных перемеще:1Ий, кинематически связанный с измерительной головкой, электронный блок, первый вход которого подключен к датчику перемещений, отличающееся тем, что. с целью повьшения точности измерений и расширения функциональных возможностей предметный стол выполнен плоским и имеет центральное отверстие, соосное толкателю, толкатель выполнен с возможностью двухпозиционного перемещения, манипулятор снабжен датчиком положения толкателя, кинематически связанным с толкателем и подключенным к второму и четвертому входам электронного блока, микролифтом, кинематически связанным с рычагом операционных перемещений,датчиком касания, установленным на торце, .выходного элемента микролифта, устройство, снабжено узлом управления микролифтом, первый вход которого (Л подключен к датчику касания и пятому входу электронного блока, выход - к с приводу микролифта, измерительная головка выполнена с сигнализатором наличия контактирования с измеряемой деталью, подключенным к второму входу узла управления микролифтом и третьему входу электронного блока, а измерительный стержень измерительной СГ) головки выполнен в виде гибкого щупа. х 00 со
10
в
ftf 20
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля деталейСлОжНОй фОРМы | 1978 |
|
SU807049A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3272624/18-28, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
