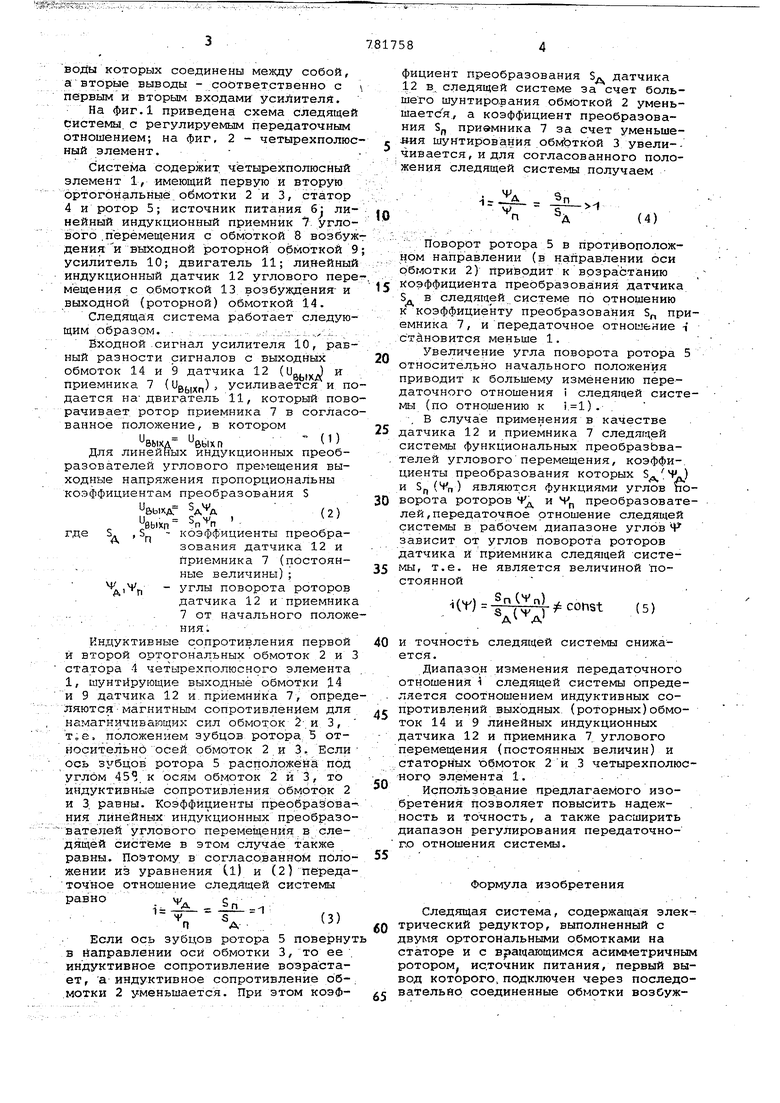
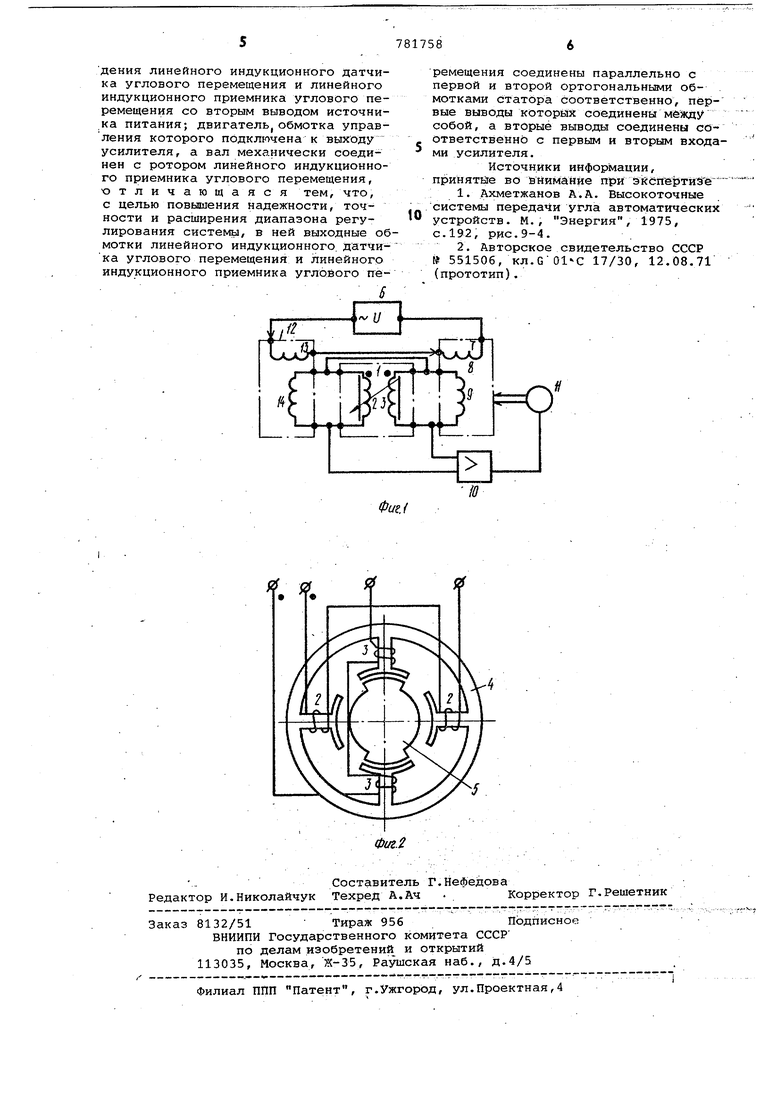
воды которых соединены между собой, а вторые выводы - соответственно с первым и вторым входами усилителя. На фиг,1 приведена схема следящей системы, с регулируемым передаточным отношением; на фиг, 2 - четырехполюс ный элемент. Система содержит, чётырехполюсный элемент 1, имеющий первую и вторую ортогональные обмотки 2 и 3, статор 4 и ротор 5; источник питания б: линейный индукционный приемник 7. углового .перемещения с обмоткой 8 возбуж дения и выходной роторной обмоткой 9 усилитель 10; двигатель 11; ли.йейный индукционный датчик 12 углового пере мещения с обмоткой 13 возбуждения- и выходной (роторной) обмоткой 14. Следящая система работает следующим образом. . :, .. . ,,:...i,,:,::. Входной .сигнал усилителя 10, равный разности сигналов с выходных обмоток 14 и 9 датчика 12 (U,,,...J и -1/1. оЫлД приемника 7 (,), усиливается и по дается на- двигатель 11, который пово рачивает, ротор приемника 7 в согласо ванное положение, в котором выхд выхп й§ы Для линейных индукционных преобразователей углового премещения выходные напряжения пропорцио.нальны коэффициентам преобразования S быхд- коэффициенты преобразования датчика 12 и приемника 7 (постоянные величины); М,У - углы поворота роторов датчика 12 и приемник .- - 7 от н.ачального положе ния. Индуктивные сопротивления первой и второй ортогональных обмоток 2 и статора 4 четырехполюсного элемента 1, шунтирующие выходные обмотки 14 и 9 датчика 12 и.приемника 7, опред ляются -магнитным сопротивлением для намагничивающих сил обмоток 2- и 3, т„е. положением зубцов ротора. 5 относительно осей обмоток 2 и 3. Если ось зубцов ротора 5 распол1ржена под углом 45S. к осям обмоток 2 и 3, то индуктивные сопротивления обмоток 2 и 3. равны. Коэффициенты преобразЪва ния линейных индукционных преобразо вателей углового перемещенйя в .следящей системе в этом случае также равны. Поэтому в согласо.ванйоМ поло жении из уравнения (.1) и (2) переда точное отношение следйщей системы п А . Если ось зубцов ротора 5 поверну в направлении оси обмотки 3, то ее индуктивное сопротивление возрастает, а индуктивное сопротивление обмотки 2 уменьшается. При этом коэффициент преобразования 5д датчика 12 в, следящей системе за счет большего шунтирования обмоткой 2 уменьшается, а коэффициент преобразования 5„ приемника 7 за счет уменьшения шунтирования облфткой 3 увели-. чивается,и для согласованного положения следящей системы получаем Поворот ротора 5 в противоположном направлении (в направлении оси обмотки 2) При1врдит к возрастанию коэффициента преобразования датчика S- в следящей системе по отношению к коэффициенту преобразования S, приемника 7, и передаточное отношение i стйновится меньше 1. Увеличение угла поворота ротора 5 относительно начального положения приводит к большему изменению передаточного отношения i следящей системы (по отношению к ). , В случае применения в качестве датчика 12 и приемника 7 следящей системы функциональных преобразЬвателей углового перемещения, коэффи-. циенты преобразования которых ) и S| (п ) являются функциями углов поворота роторов Тд и 4, преобразователей, передаточное отношение следящей системы в рабочем диапазоне углов Ч зависит от углов поворота роторов датчика и приемника следящей системы, т.е. не является величиной постояннойЧГ) const и точность следящей системы снижается.- . . Диапазон изменения передаточного отношения i следящей системы определяется соотношением индуктивных сопротивлений выходных (роторных)обмоток 14 и 9 линейных индукционных датчика 12 и приемника 7 углового перемещения (постоянных величин) и статорных хэбмоток 2 и 3 четырехполюсного элемента 1. - Использование предлагаемого изобретения позволяет повысить надежность и точность, а также расширить диапазон регулирования передаточног.о отношения системы. Формула изобретения Следящая система, содержащая электрический редуктор, выполненный с двумя ортогональными обмотками на статоре и с вращающимся асимметричным ротором, ис.точник питания, первый вывод которого.подключен через последовательно соединенные обмотки возбуждения линейного индукционного датчика углового перемещения и линейного индукционного приемника углового перемещения со вторым выводом источника питания; двигатель, обмотка управления которого подключена к выходу усилителя, а вал механически соединен с ротором линейного индукционного приемника углового перемещения, отличающаяся тем, что, с целью повышения надежности, точности и расширения диапазона регулирования системы, в ней выходные обмотки линейного индукционного, датчика углового перемещения и линейного индукционного приемника углового пе 5
ремещения соединены параллельно с первой и второй ортогональными обмотками статора соответственно, первые выводы которых соединены между собой, а вторые выводы соединены соответственно с первым и вторым входами усилителя.
Источники инфор1мации, принятие во внимание при экапёртйЭё
1.Ахметжанов А.А. Высокоточные системы передачи угла автоматических устройств. М., Энергия, 1975,
с.192, РИС.9-4.
2.Авторское свидетельство СССР № 551506, кл. 17/30, 12.08.71 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1981 |
|
SU1014000A1 |
| Индукционный датчик | 1989 |
|
SU1705974A1 |
| ТРЕХФАЗНЫЙ ИНДУКЦИОННЫЙ МНОГОПОЛЮСНЫЙ ДАТЧИК | 1967 |
|
SU190243A1 |
| Индукционный датчик | 1979 |
|
SU845233A1 |
| Трансформаторная дистанционная передача | 1980 |
|
SU894772A1 |
| Преобразователь угла рассогласования валов в напряжение | 1986 |
|
SU1336068A1 |
| Устройство для компенсации четвертной девиации датчика магнитного курса | 1971 |
|
SU551506A1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| Система синхронной связи | 1946 |
|
SU69777A2 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
LUtff
