(54) УСТРОЙСТВО ДЛЯ.ТРАНСПОРТИРОВАНИЯ ЖИДКОСТИ в СОСУДАХ
ним из поворотных рычагов первого кривошиянаго механизма и приводимое в движение через кривошипно-шатунный механизм от приводного вала, а на валу приводного барабана конвейера установ лено кулачковое колесо, снабженное расположенными по периметру кулачками, периодически взаимодействуйщими с защелкой , шарнирно связанной с качающимся рычагом, соединенным ша1рнирно с рамой конвейера и с приводным валом посредством кривошипно-шатунного механизма, установленного со смещением примерно на 150 в направлении против часовой стрелки относительно кривошипно-шатунного механизма, соединенного с коромыслом...
Шатун кривошипно-шатунного механизма, соединенный с коромыслом, целесообразно выполнить длиной, превышающей длину кривошипа, установленного на приводном валу.
Поворотные рычаги, расположенные с двух боковых сторон грузонесущего органа, могут быть соединены между собой скобами,
На раме конвейера может быть шарнирно установлена стопорная собачка, предотвращающая обратный ход кyлaчкo вого колеса.
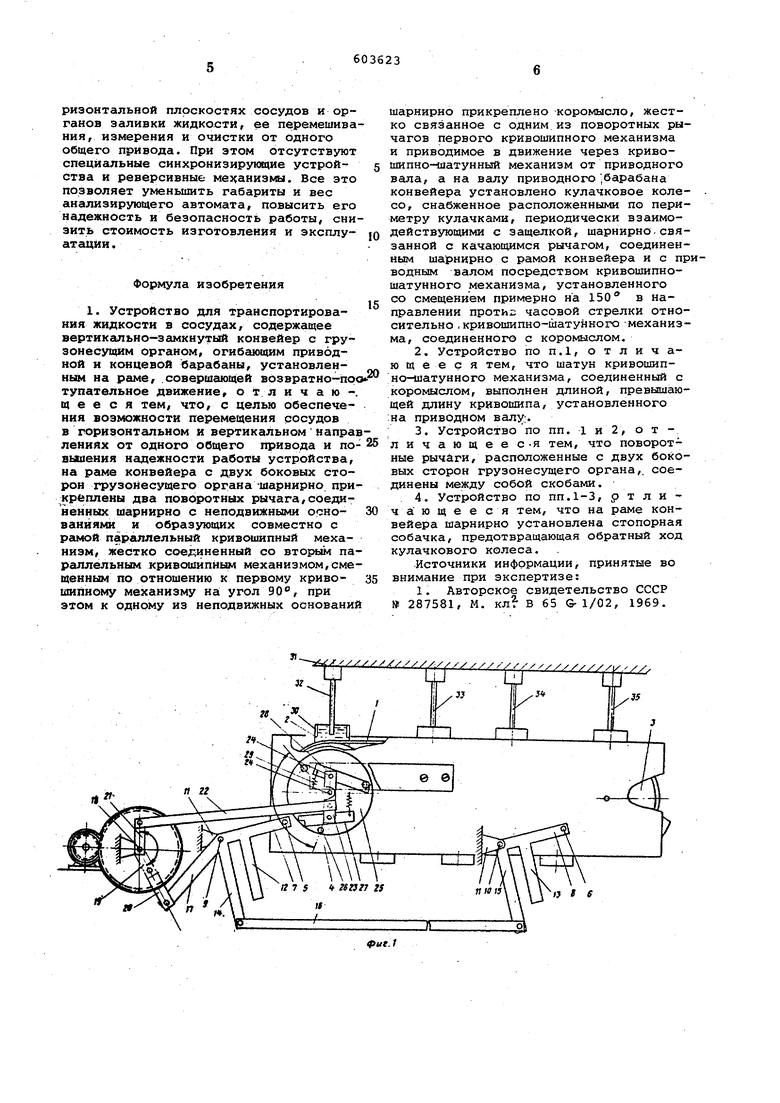
На фиг.1 изображено предлагаемое устройство, вид спереди,- на фиг.2 то же, вид сверху.
Предлагаемое устройство содержит вертикально-замкнутый конвейер, грузонесущий орган 1 которого огибает np водной 2 и концевой 3 барабаны, которые смонтированы на раме 4. Грузонесущий орган может быть ленточным или цепным.
С двух боковых сторон грузонесушего органа.1 на раме 4 с помощью шарниров 5 и б установлены два поворотных рычага 7 и 8, которые посредством шарниров 9 и 10 соединены с неподвижными основаниями 11. Поворотные рычаги 7 и 8 совместно с рамой 4 образуют два параллельных кривошипных механизма, расположенных по обе стороны конвейера. Рычаги 7 и 8 соединены между собой скобами 12 и 13.
Под углом указанному кривошипному механизму расположен второй кривошипный механизм,жестко связанный с первым кривошипным механизмом и образован ный звеньями 14 и 15 и шатуном 16.
К одному из неподвижных оснований 11 шарнирно прикреплено коромысло 17, которое жестко связано с поворотным рычагом 7. Коромысло приводится в дви. жение от приводного вала 18 через кри вошип 19 и шатун 20, длина которого превышает длину кривошипа 19.
От приводного вала 18 движение передается также через кривошип 21 и шатун 22 кача1рщемуся рычагу 23, который
шарнирно связан с рамой 4 и приводит в движение грузонесущий орган 1.
На валу 24 приводного барабана 2 конвейера установлено кулачковое колесо 25, по периметру которого расположены кулачки 26. Качающийся рычаг 23 шарнирно связан с защелкой 27.
Для предохранения рт обратного хода приводного барабана 2 качающийся рычаг 23 снабжен стопорной собачкой 28 один конец которой посредством пружины 29 связан d рамой 4.
„ Кривошипно-шатунный механизм, соединенный с качающимся.рычагом 23, установлен со смещением примерно на 150 в направлении против часовой стрелки относительно кривошипно-шатунного механизма, соединенного с коромыслом 17
На грузонесущем органе 1 .распола-гают сосуды 30 тремя параллельно расположенными рядами.
Над сосудами 30 к корпусу 31 автомата присоединяют расположенные в три ряда органы заливки 32, орган перемешивания 33, измерительный орган 34 И орган очистки 35.
Устройствр работает следующим образом. При вращении приводного вала 18 движение передается кривошипу 21, шатуну 22 и качающемуся рычагу 23. Защелка 27, связанная с рычагом 23, входит в зацепление с одним из кулачков 26 и вращает кулачковое колесо 25 и . вместе с ним приводной барабан 2, поворачивая его на угол о(. , равный 120 Если периметр приводного барабана., в три раза больше расстояния между соседними сосудами 30, то благодаря вращению барабана каждый сосуд передвигается на один шаг, равный расстоянию между coceдниIvш сосудами. Стопорная собачка 28 препятствует обратному ходу кулачкового колеса 25 и барабана 2
Подъем и опускание конвейера с сосудами 30 осуществляется с помощью двух поворотных рычагов 7 и 8., которые, посредством коромысла 17, кривошипа „19 и шатуна 20 связаны с приводным валом 18. Наличие кривошипного механизма, образованного звеньями 14 и 15 и шатуном-16, позволяет устранить мертвое положение рычагов 7 и 8..
Благодаря тому, что кривошипы 19 и 21, установленные на приводном валу, смещены на угол 150°, обеспечивается последовательное движение в трех направлениях: опускание конвейера,- продвижение по -горизонтали грузонесущего органа и подъем конвейера. Сосуды 30 совершают при транспортировке путь прямоугольной формы. При подъеме сосудов в них входят поочередно органы 32, 33, 34, 35 и выполняют свои функции по анализу жидкости.
Конструкция предлагаемого устройства позволяет обеспечить относительное перемещение в вертикальной и гориэонтальной плоскостях сосудов и органов заливки жидкости, ее перемешива ния, измерения и очистки от одного общего привода. При этом отсутствуют специальные синхронизирукицие устройства и реверсивные мез анизмы. Все это позволяет уменьшить габариты и вес анализирующего автомата, повысить его надежность и безопасность работы, сни зить стоимость изготовления и ЭКСПЛуатации. Формула изобретения 1. Устройство для транспортирования жидкости в сосудах, содержащее вертикёшьно-замкнутый конвейер с грузонесущим органом, огибающим приводной и концевой барабаны, установленнь1м на раме, .совершающей возвратно-пр тупательное движение, отличающ е е с я тем, что, с целью обеспечения возможности перемещения сосудов в горизонтальном и вертикальномнапра лениях от одного общего привода и по вышения надежности работЬ устройства, на раме конвейера с двух боковых сторон грузонесущего органа -шарнирно прикреплены два поворотных рычага,соединенных шарнирно с неподвижными орнованйями и образующих совместно с рашой паргшлельный кривошипный механизм, жестко соедчиненный со вторым параллельным кривошипным механизмом,смещенным по отношению к первому кривошипному механизму на: угол 90, при этом к одному из неподвижных оснований шарнирно прикреплено коромысло, жестко связанное с одним.из поворотных рычагов первого кривошипного механизма и приводимое в движение через кривошипно-шатунный механизм от приводного вала, а на валу приводного .барабана конвейера установлено кулачковое колесо, снабженное расположенными по периметру кулачками, периодически взаимодействующими с защелкой, шарнирно.связанной с качающимся рычагом, соединенным шарнирно с рамой конвейера и с приводным валом посредством кривошипношатунного механизма, установленного со смещением примерно на 150 в направлении протиг часовой стрелки относительно ,кривошипно-шатунного механизма, соединенного с коромыслом. 2. Устройство по п.1, отличающее с я тем, что шатун кривошипно-шатунного механизма, соединенный с коромыслом, выполнен длиной, превышающей длину кривошипа, установленного :на приводном валу;. ; 3. Устройство по пп. i и 2, о т личающеес-я тем, что поворотные рычаги, расположенные с двух боковых сторон грузонесущего органа,, соединены между собой скобами. . 4. Устройство по пп.1-3, р т л и ча ю щ е е ся тем, что на раме конвейера шарнирно установлена стопорная собачка, предотвращающая обратный ход кулачкового колеса. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 287581, М. В 65 G-1/02, 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортировки сосудов с жидкостями | 1978 |
|
SU1014789A1 |
| Шаговый конвейер | 1990 |
|
SU1720955A1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Устройство для деления теста на куски и последующего их шлифования | 1972 |
|
SU523677A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2010 |
|
RU2454317C1 |
| Устройство для возведения стоечной крепи в очистном забое | 1985 |
|
SU1312178A1 |
| Устройство для резки бруса из пластичного материала | 1985 |
|
SU1342742A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| УСТРОЙСТВО И СПОСОБ ПОДАЧИ СЛОЖЕННЫХ ИЗДЕЛИЙ ИЗ САНИТАРНО-ГИГИЕНИЧЕСКОЙ БУМАГИ ИЛИ ПОДОБНЫХ ИЗДЕЛИЙ В УПАКОВОЧНУЮ МАШИНУ С ВРАЩАЮЩИМСЯ БАРАБАНОМ | 2011 |
|
RU2568748C2 |

