Изобретение относится к прикладному телевидению и может быть испол эовано в промышленности средств связи при изготовлении диагностической аппаратуры для изучения микрои макроциркуляции в сосудах глаза для улучшения качества и повышения объективности диагностики сосудистых и глазных заболеваний.
Известно устройство для слежения за подвижными объектами, содержащее телевизионную камеру, видеоконтрольный блок блок ручного наведения, блок измерения координат, блок памяти координат, блок форкосрования строЗа, причем выход телевизионной камеры соединен с входами видеоконтрольного блока и блока измерения координат, выход блока измерения координат через блок памяти соединен с входом блока формирования строба tl )
Это устррйство может работать в двух режимах; в режиме ручного наведения строка и в режиме автоматического отслеживания характерной точки объекта или самого малоразмерного объекта.
В режиме ручного наведения строба оператор по экрану видеоконтрольного блоКа с помощью блока ручного наведения управляет положением строба на растре. При этом на выходе блока ручного наведения фор1в1руется 4;ифровой код котор1;Лй записывается в блок памяти координат. На основании, этого кода (коарда{наты объекта по строке и кадру) в блоке форчировакия строба форлмруется электронньй маркер в виде прямоугольного строба, котсфы ограничивает интересующую ЗОНУ аигшиза. Из режима ручного наведения, после того, как оператор навел строб на интересующий объект, устройство может быть переведено в режим автоматического отслеживания. При видеосигнал из телевизионной камеры подается на блок измерения координат, который производит измерение положения объекта на растре передающей трубки в виде цифрового кода. Далее этот код записывается в блок памяти координат. И далее на основании этого :кода формируется электронный маркер, так же как в режиме ручного на ведения.
Недостатком этого устройства является низкая помехоустойчивость при использовании его для анализа протяженных биологических объектов, например сосудов глаза, в режиме автоматического слежения. Протяженные биологические объекты, находящиеся внутри строба, как правило, не имеют характерной контрастной рбласти, точки, координаты которой могли бы быть измерены блоком измерения коорди:1ат и приняты за точку отсчета.
Цель изобретения - повьаиение помехоустойчивости.
С этой целью в устройство для слежения за подвижными объектами, содержащее телевизионную камеру, видеоконтрольный блок, блок ручного наведения, блок измерения координат первый блок памяти, первый блок форкшрования строба, причем выход телевизионной камеры соединен с .перыами входами видеоко трольного блока и блока измерения координат, выходы блока измерения координат и блока ручного наведения через перetsK блок памяти соединены с входом первого блока формирования строба, выход которого сое щинеи с вторым входом блока измерения координат, введены второй и третий блоки памяти, второй блокформирования , блок вычитания кодов, блок суммирования кодов, блок управления и элемент ИЛИ, при этом первый |и второй входы второго блока памяти соединены соответственно с выходами блока ручного наведения и блока сумкмрования кодов, выход первого блока памяти .соединен с первым входом блока вычитания кодов и первым .входсш блока суммирования кодов, выход второго блока памяти соединен с входом блока вь читания кодов и входом второго блока формирования строба выход блока вычита- ния через трети;й блок памяти соединен с вторым входом блока суммирования кодов, выходы первого и второго блоков формирования строба через элемент ИЛИ соединены с вторым входом виД1еоконтрольног6 блока, первый, вторс и третий выходы блока управления соединены с входами управления соответственно первого и BTopoio блоке® памяти и блока вычитания кодов.
Второй блок памяти и второй бло формирования строба служат для формирования строба, который предназначен только для анализа интересующей области биологического объекта. Влок вьгчитания кодов предназначен для вычисления разницы в положении первого и второго стробов в виде кода. Третий блок памяти предназначен для хранения кода разниц : положений стробов. Блок суьфшрования кодов служит для суммирования текущих координат первого строба и кода разницы положений стробов.
Повышение помехоустойчивости слежения за подвижным объектом достигается за счет впведения второго стрба, который следит за положением характерной точйи изображения, и жесткой связи между положениями обоих стробов.
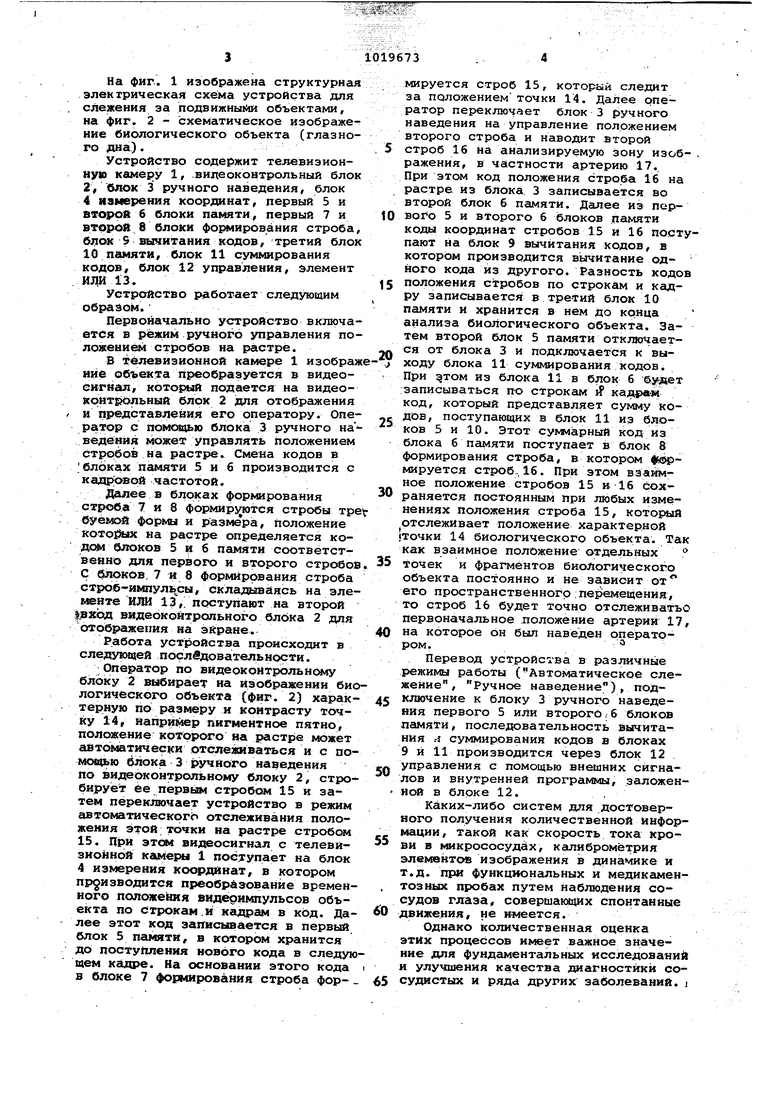
Ha фиг. 1 изображена структурная электрическая схема устройства для слежения за подвижными объектами, на фиг. 2 - схематическое изображение биологического объекта (глазного дна) .
Устройство содержит телевизионную камеру 1, .видеоконтрольный блок 2« блок 3 ручного наведения, блок 4 измерения координат, первый 5 и 8 горрй 6 блоки памяти, первый 7 и второй 8 блоки формирования строба, блок 5 амитання кодов, третий блок 10 пшяти, блок 11 суммирования кодов, блок 12 управления, элемент ИДИ 13.
Устройство работает следующим Образом.
Первоначально устройство включается в режим ручного управления положением стробов на растре.
В телевизионной камере 1 изображние об-ьекта преобразуется в видеосигнал, которьй подается на видеокШтрЬльный блок 2 для отображения и представления его оператору. Оператор с помсиць блока 3 ручного на ведения Л4ожет управлять положением стробов на растре. Смена кодов в ;блоках памяти 5 и б производится с кадровой частотой.
удалее в блоках формирования строба 7 и 8 формируются стробы rpeбуемай формы и размера, положение на растре определяется кодадм блоков 5 и 6 памяти соответственно для первого и второго стробов С блоков. 7 и 8 Формирования строба строб-импул1 сы, складашаясь на элевюнте ИЛИ 13, поступают на второй |:ВхЬд видеоконтропьного блока 2 для отображения на эксране.
Работа устройства происходит в след}гю{аей последовательности.
Оператор по видеоконтрольному блоку 2 выбирает на изображении биологического объекта (фиг. 2) характерную по размеру и контрасту точку 14, например пигментное пятно, положение КОТОРОГО на растре может автоттически отслеживаться и с поMoutbto блока 3 ручного наведения по видеоконтрольному блоку 2, стробирует ее первьш стробом 15 и затем перектвочает устройство в режим автоматического отслеживания положения ЭТОЙ точки на растре стробом 15. При этом видеосигнал с телевизионной ка|Ме1%1 1 поступает на блок 4 измерения координат, в котором производится преобразование временного положения видеримпульсов объекта по строкам.и кадрам в код. Далее этот код запгисьтается в первый блок 5 памяти,, в котором хранится до поступления нового кода в следующем кадре. На основании этого кода в блоке 7 формирования строба фор1019673
мируется строб 15, который следит за положениемточки 14. Дайее оператор переключает блок 3 ручного наведения на управление положением второго строба и наводит второй строб 16 На анализируемую зону изображения, в частности артерию 17. При этом код положения строба 16 на растре из блока. 3 записывается во второй блок 6 памяти. Далее из первого 5 и второго 6 блоков памяти коды координат стробов 15 и 16 поступают на блок 9 вычитания кодов, в котором производится вычитание одного кода из другого. Разность кодов положения стробов по строкам и кадру записывается в третий блок 10 памяти и хранится в нем до конца анализа биологического объекта. Затем второй блок 5 памяти отключается от блока 3 и подключается к выходу блока 11 суммирования кодов. При дтом из блока 11 в блок 6 гзаписываться по строкам rf кадрам код, который представляет сумму кодов, поступающих в блок 11 из блоков 5 и 10. Этот суммарный код из блока 6 памяти поступает в блок 8 формирования строба, в котором формируется строб. 16. При этом взаимное положение стробов 15 и 16 сохраняется постоянным при Л1обых изменениях положения строба 15, который отслеживает положение характерной (ТОЧКИ 14 биологического объекта. Так как взаимное положение отдельных точек и фрагментов биологического объекта постоянно и не зависит от его пространственного:перемещения, то строб 16 будет точно отслеживатьо первоначальное положение артерии 17, на которое Он был наведен о ератором.
Перевод устройства в различные режимы работы (Автоматическое слежение, Ручное наведение), подключение к блоку 3 ручного наведения первого 5 или второго.6 блоков памяти, последовательность Вычитания л суммирования кодов в блоках 9 и 11 производится через блок 12 управления с помощью внешних сигналов и внутренней программы, эаложеннсда в блоке 12. .
Каких-либо систем для достоверного получения количественной информации, такой как скорость тока крови в микрососудёх, калибромётрия элементов изображения в динамике и т.д. при функциональных и медикаментозных пробах путем наблюдения сосудов глаза, совершающих спонтанные движения, не имеется.
Однако количественная оценка этих процессов имеет важное значение для фундаментальных исследований и улучшения качества диагностики сосудистых и ряда других заболеваний,
Предлагаемое.устройство позволяет исследовать длительные динамические процессы в сосудах глаза и получать качественную информацию несмотря на подвижность исследуемого объекта .
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для исследования кровеносного русла | 1982 |
|
SU1056979A1 |
| Телевизионное устройство со следящим стробированием изображения объекта | 1976 |
|
SU640453A1 |
| Телевизионное устройство со следящим стробированием изображения объекта | 1981 |
|
SU966931A2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| Координатный телевизионный измеритель | 1981 |
|
SU1040624A1 |
| КОМПЛЕКСНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ ПОИСКА ПОТЕРПЕВШИХ БЕДСТВИЕ ЛЮДЕЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2087386C1 |
УСТРОЙСТВО ДЛЯ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ, содержащее телевизионную камеру, видеоконтрольньй1 блок, блок ручного наведения, блок измерения координьт, первый блок памяти, первый блок формирования строба, причем выход телевизионной камеры соединен.с первыми входами видеоконтрольного блока и блока измерения коо1$ Ьинат, выходы блока измерения координат и блока ручного наведения через первый блок памяти соединены с входом первого блока формирования строба, выход которого соединен с вторым входом блока измерения координат, от л ич .а ю щ е е с я тем, что, с целью повышения помехоустойчивости, в него введены второй и .третий блоки памяти, второй блок формирования строба, блок вычитания.кодов, блек суммирования кодов, блок управления и элемент ИЛИ, этом первый и второй второго блока памяти соединены соответственно с выходами блока ручного наведения и блока суммирования кодов, выход первого блока памяти соединён с первым вхо.дом блока вычитания и первым входом блока суммирования кодов, выход второго блока памяти соединен с вторым входом блока вычитания кодов и входам второго блока фор1и(ирования строба, выход блока вычитания через третий блок памяти соединен с втоV ko рым входом блока сугиошрования кодов, выходы первого и второго блоков формирования строба через элеСмент ИЛИ соединены с вторым входом видеоконтрольного блока, первый, с второй И третий выходы блока управления соединены с входами управления соответственно первого и второ го блоков памяти и блока вычитания кодов. QO аь ч со
в
(Put. 2
XZ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ получения кодеина | 1922 |
|
SU178A1 |
