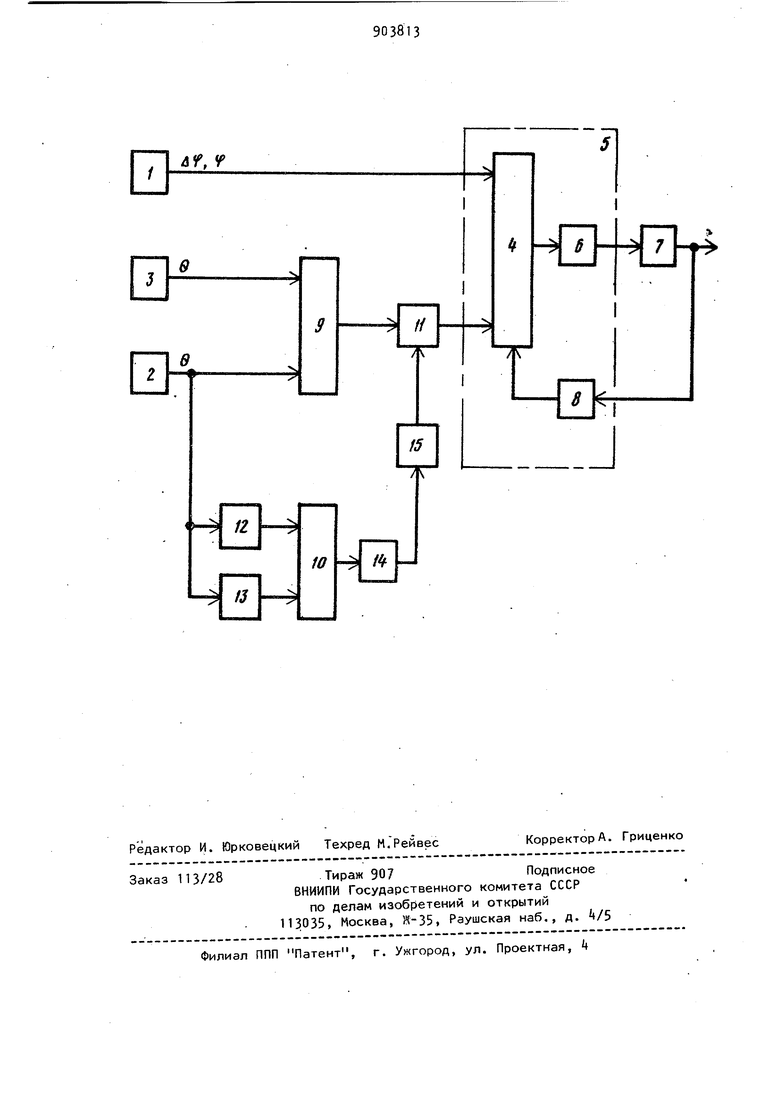
Изобретение относится к yctpoйcтвам автоматического управления подвижными объектами, в частности к устройствам для управления движением морских судов. Известна система умерения дестаби лизирующих параметров движения судов содержащая различные датчики параметров движения, сумматоры, а также исполнительные мexaниз рулевых машин, снабженные блоками обратной связи Однако в этой системе при помощи закрылков стабилизируют одновременно высоту центра тяжести и дифферент что обуславливает быстрый износ исполнительного механизма и рулевой машины, так как каждый из органов управления движением в течение всего време1ни управления движением принимает участие в стабилизации нескольких параметров движения судна. Наиболее близкой к предлагаемой является система стабилизации бортоВОЙ качки и курса судна, которая содержит авторулевой с сумматором на входе исполнительный механизм рулевой машины, блок обратной связи, датг чики угла и угловой скорости рыскания и блок выработки сигнала, пропорционального углу бортовой качки, соединенные с соответствующими входами сумматора авторулевого. Кроне того, система содержит блок выработки сигнала угловой скорости камки, выход которого соединен также с одним, из входов сумматора авторулевого t2 1 Недостатком известной системы является недопустимо большая загрузка рулевого привода при неспокойном море, приводящая к понижению надежности работы системы. Цель изобретения - повышение надежности работы системы. Эта цель достигается тем, что система, содержащая датчики угла и угловой скорости рыскания, подключенные к первому и второму входам первого сумматора, третьим входом связанного с выходом блока обратной связи, а .выходом - со входом исполнительного механизма, а также датчики угла и угловой скорости крена, содержит последовательно соединенные второй сумматор и ключ, последовательно соединенные третий сумматор усреднитель и пороговый элемент, а также инвертор и блок выделения модуля, входами подключенные к выходу датчика угла крена, а выходами ко входам третьего сумматора, выход порогового элемента связан сб вторым входом ключа, выходом подключенного k Tpeiьему входу первого сумматора, причем датчиков угла и угловой скорости крена связаны со входа второго сумматора. На чертеже изображена блок-схема предлагаемой системы. Система содержит датчики 1 угла угловой скорости рыскания (объедине ны), датчик 2 угла крена, датчик 3 угловой скорости крена, первый сумматор ч, авторулевой 5 и исполнител ный 6 механизмы, рулевая машина 7, блок О обратной связи, второй 9 и третий 10 сумматоры, ключ 11, инвер тор 12, блок 13 выделения модуля, усреднитель 14 и пороговый элемент Система работает следующим образом. Сигнал рассогласования по курсу угловой скорости от датчика 1 посту пает на первый сумматор Ц авторулевого механизма 5. Сигналы с датчиков . и 3 угла крена и угловой скорости крена поступают на первый сум матор 4 пока ключ 11 открыт. Открытие ключа 11 будет при поступлении сигнала с выхода порогового элемента 15, выполненного в виде триггера ШмИдта. Порог срабатывания выбирают, исходя из допустимых колебаний угла бортовой качки, т.е. на вход порогового элемента 15 поступает си нал D I Лк{/в/-©) - DoJdf ,, о где Dp - допустимая дисперсии бортовой качки; & - угол крена; Т и К - постоянная времени и коэффициент передачи усреднителя I. Таким образом, ключ 11 пропускает сигналы бортовой качки от датчиков 2 и 3 на вход первого сумматора только тогда, когда на второй вход ключа 11 будет поступать не нулевой си|- нал с выхода триггера Шмидта 15, появляющийся при волнении моря повышенной интенсивности, т.е. когда уменьшение бортовой качки наиболее целесообразно. Использование изобретения позволяет увеличить срок службы авторулевого и рулевой машины. Формула изобретения Система уменьшения бортовой качки и рыскания по курсу судна, содержащая датчики угла и угловой скорости рыскания, подключенные к первому и второму входам первого сумматора, третьим входом связанного с выходом блока обратной связи, а выходом со входом исполнительного механизма, а также датчики угла и угловой скорости крена, отличающаяся тем, что, с целью повышения надежности работы системы, она содержит последовательно соединенные второй сумматор и ключ, последовательно соединенные третий сумматор, усреднитель и пороговый элемент, а также инвертор и блок выделения модуля, входами подключенные к выходу датчика угла крена, а выходами - ко входам третьего сумматора, выход порогового элемента связан со вторым входом ключа, выходом подключенного к третьему входу первого сумматора, причем выходы дат-j чиков угла и угловой скорости крена связаны со входами второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Патент США N 3137260, кл. .5, 1970. 2.Авторское свидетельство СССР № 5t88 2, кл. G 05 D 1/08, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации ьортобортовой качки и курса судна | 1974 |
|
SU548842A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| Устройство для оценки мореходных качеств судна | 1983 |
|
SU1160457A2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Анализатор мореходных качеств судна | 1985 |
|
SU1298781A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Корректор угла крена для успокоителя бортовой качки судна | 1974 |
|
SU468831A1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |