Изобретение относится к машиностроению, а именно к технологическому оборудованию сборочного производства, и может быть использовано в автоматах для комплектования винтов с шайбами.
Известно устройство для сборки винтов с шайбами, содержащее ротор с периферийными радиально направлен ными пазами CllНедостатком данного устройства является то, что при его работе возможны случаи попадания в кассеты некачественных комплектов, т,е, винтов неукомплектованных одной или двумя шайбами, что имеет место по разным причинам, в частности неравномерной подачи шайб. Наличие таких некачественных комплектов в конечном итоге снижает производи-, тельность работ по завинчиванию рез бовых соединений.
Известно устройство для сборйй деталей, бходящих одна в другую содержащее рабочий ротор и механизм контроля собираемУх деталей t23
Однако данное устройство не обеспечивает качественного контроля сборки винта с шайбами,,а, следовательно, и качества сборки.
Цель изобретения - повьшение качества сборки.
Поставленная цель достигается Тем, что в устройстве для сборки винтов с шайбами, содержащем установленный на неподвижном диске ротор, по периферии которого иметотся р диапьйр йайравленные пазы, механизм подачи винтов к ротору, механкэмы подачи и надевания на винты просйах и nps HHHBx иийб, а также механизм контроля собираемых деталей/ .ротор снабжен двумя кольцевыми копирами, закрепленными на фланце, ротора перпендикулярно друг другу, а механизм контроля выполнен в виде прямолинейного и Г-образНог о двуплечих рычагов, расположенных параллельно один относительно другого, одноплечего рычага, установленного с возможностью качания S плоскости, перпендикулярной плоскости качания двуплечих рычагов и плоскости вращения ротора, двух роликов, взаимодействуюйдах с копирами, собачки и упора, при этом двуплечие рычаги одним из своих плеч поджаты друг к другу, а ролики закреплены соответственно на свободнсям плече прямолинейного двуплечего рычага и в средней части одноплечего рычага, при этом свободное плечо Г-образного двуплечего рычага, и конец одноплечего рычага установлены с возможностью взаимодействия с собачкой , а упор размещен в месте закрепления ролика на одноплечем рычаге и направлен в сторону пазов ротора.
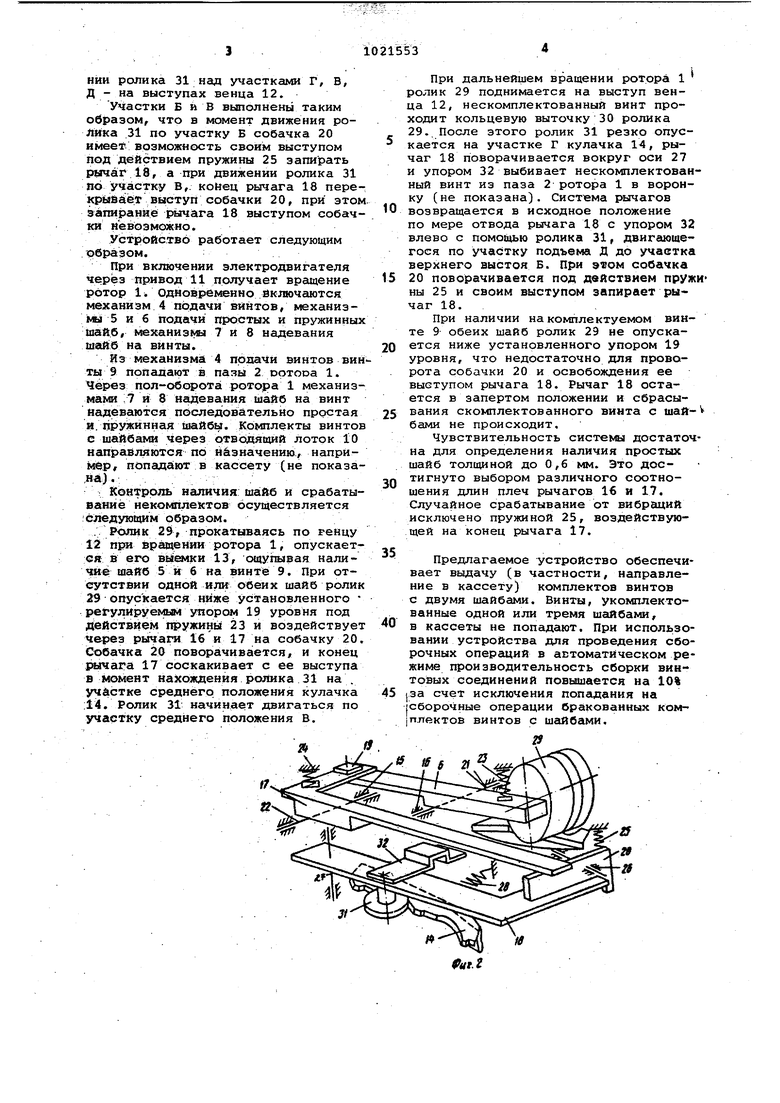
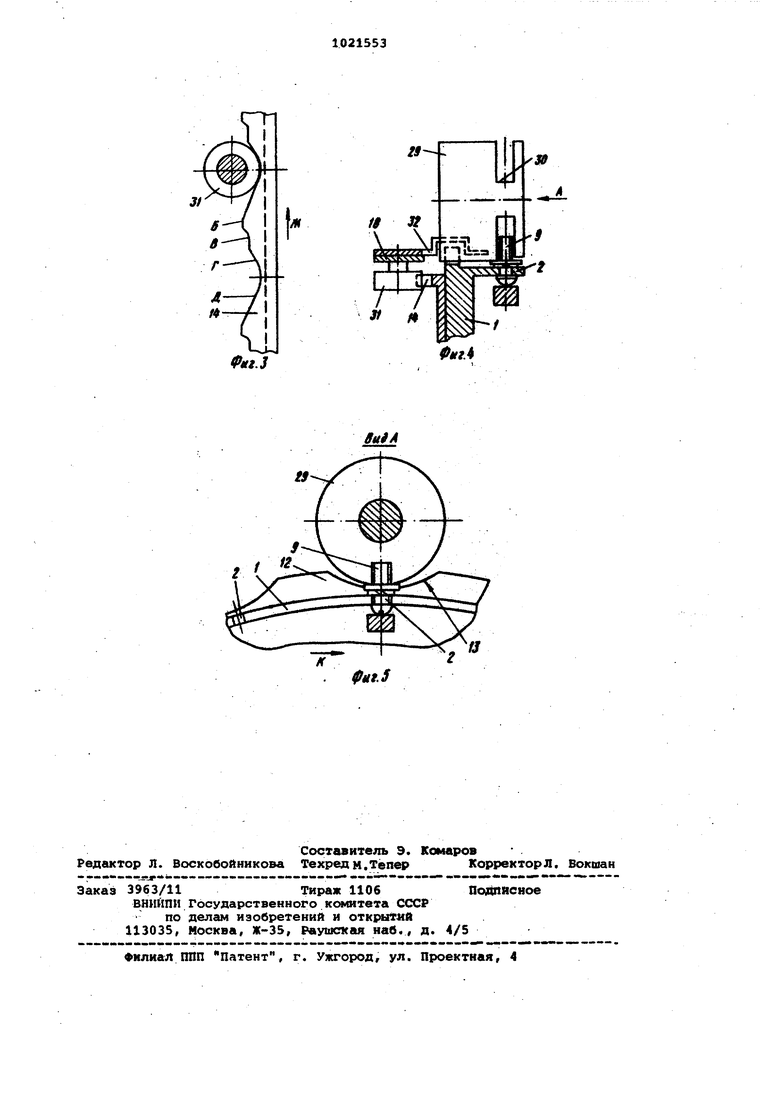
На фиг. 1 представлено устройство, общий )зид; на фиг. 2 - кинематическая схема взаимодействия систем 5 мы рычагов, роликов, собачки и толкателя, ria фиг. 3 - профиль торцового кулачка с роликом, на фиг. 4 о нбсительное расположение ротора с выполненными по наружной позерхШ ности фланца венцом с выемками, торцевого кулачка роликов, рычага с толкателем, на фиг. 5 - вид А на фиг. 4.(Стрелки Е, Ж,и К показывают направление вращения ротора). 15 Устройство для сборки винтов с шайбами содерммт ротор 1 с периферийными радиально-направленньпли пазами 2, установленный на неподвижном диске 3, механизм 4 подачи винio механизмы 5 и б .подачи простых и пружинных шайб, механизмы 7 и 8 надевания ,шайб на винты 9, отводяйрй лоток 10, привод 11. По окружности ротора 1 выполнен кольцевой копир 12 с выемками 13, расположенными против пазов 2 (фиг. 5) . На торцовой Поверхности ротора, ;Т.е. в плоскости, перпендикулярной плоскости копира (венца) 12, выпол. йен кулачковый кольцевой копир 14
0 (фиг. 1-4). На неподвижном диске 3 с помощью стойки 15 закреплен NKханизм контроля собираемых деталей, выполненный в. прямолинейного двуплечего рычага 16,, Г-образного
5 двуплечего рычага 17 и одноплечего рычага 18, причем рычаги 16 и 17 одним из своих плеч -поджаты друг к другу упором 19, Двуплечий рычаг 17 и рычаг 18 установлены с возможностью взаимодействия с собачкой 20. Рычаги 16 и 17 на стойке 15 установлены с помощью осей 21 и 22 и подпружинены прузшнами 23 и 24. Собачка 20 подпружинена пружиной 25
5 установлена на оси 26. Рычаг 18 также установлен на стойке 15 на оси 27 и подпружинен пружиной 28.
На рычаге 16 закреплен ролик 29, имеющий кольцевой паз 30 (фиг. 4), а в средней части рычага 18 закреплены ролик 31 и упор 32 (в частности он может находиться ha оси ролика).
Вся « система рычагов установлена таким образом, что ролик 29 имеет
5 возможность перекатывания по венцу 12. Венец 12 имеет участки: Б - верхнего выстоя, В -среднего положения, Г - опускания, Д - подъема, причем число участкЬв каждого вида
0 равно числу пазсш 2 (фиг. 3).
Участки Б, В, Г, Д расположены относительно выемок 13 ротора 1 так. что при нахождении ролика 31 над участком В, ролик Я9 находится в
5 жыемке 13 венца 12, а при нахождеНИИ ролика 31 над участками Г, В, Д - на выступах венца 12.
Участки БИВ выполнены таким образом, что в момент движения ролика 31 по участку Б собачка 20 имеет возможность своим выступом под действием пружины 25 запирать 18, а при движении ролика 31 по участку в,, конец рычага 18 перекр1Ь ййет выступ собачки 20, при этом запи рание рычага 18 выступом собачjcH невозможно.
Устройство работает следующим рбразом.
При включении электродвигателя чер1эз привод 11 получает вращение ротор 1. Одноврёмеино Включаются механизм 4 подачи винтов, механизмы 5 и б подачи простых и пружинных шайб, механизмы 7 и 8 надевания шайб на винты.
Из механизма 4 прваЧи винтов винты 9 попадают в пазы 2 ортооа 1. Через пол-оборота ротора 1 механизмами ;7 и 8 надевания шайб на винт надеваются последовательно прсэстая и. те ужинная шайбы. Коитлекты винтов с шайбс1ми через отводящий лоток 10 направляются по ййзначению, например, попадают в кассету (не показа,на,).; ...;-;
: Контроль наличия шайб и срабатывание некомплектов осуществляется следующим образом.
.Ролик 29, прокатываясь по генцу 12 при вращении ротора 1, опускается в его ваемкк 13, ощупывая наличие шайб 5 и 6 на винте 9. При отсутствии одной или обеих шайб ролик 29 опускается ниже установленного р ег3гглируемь | упором 19 уровня под Действием пружины 23 и воздействует через рычаги 16 и 17 на собачку 20. Собачка 20 поворачивается, и конец jMjjMara 17 соскакивает с ее выступа в момент нахождения ролика 31 на . участке среднего положения кулачка :14. Ролик 31 начинает двигаться по участку среднего положения В.
При дальнейшем вращении ротора 1 ролик 29 поднимается на выступ венца 12, нескомплектованный винт проходит кольцевую выточку 30 ролика 29. После этого ролик 31 резко опускается на участке Г кулачка 14, рычаг 18 поворачивается вокруг оси 27 и упором 32 выбивает нескомплектованный винт из паза 2- ротора 1 в воронку (не показана). Система рычагов возвращается в исходное положение по мере отвода рычага 18 с упором 32 влево с помощью ролика 31, двигающегося по участку подъема Д до участка верхнего выстоя Б. При эфом собачка 20 поворачивается под действием пружны 25 и своим выступом запирает рычаг 18.
При наличии на комплектуемом винте 9- обеих шайб ролик 29 не опускается ниже установленного упором 19 уровня, что недостаточно для проворота собачки 20 и освобождения ее выступом рычага 18. Рычаг 18 остается в запертом положении и сбрасывания скомплектованного винта с шайбами не происходит.
Чувствительность систекы достаточна для определения наличия простых шайб толщиной до 0,6 мм. Это достигнуто выбором различного соотношения длин плеч рычагов 16 и 17. Случайное срабатывание от вибраций исключено пружиной 25, воздействующей на конец рычага 17.
Предлагаемое устройство обеспечивает выдачу (в частности, направление в кассету) комплектов винтов с двумя шайбами. Винты, укомплектованные одной или тремя шайбами, в кассеты не попадают. При использовании устройства для проведения сборочных операций в автоматическом режиме производительность сборки винтовых соединений повышается на 10% jsa счет исключения попадания на (Сборочные операции бракованных ком)п.пектов винтов с шекйбами.
г§
ff /«
ФнгЛ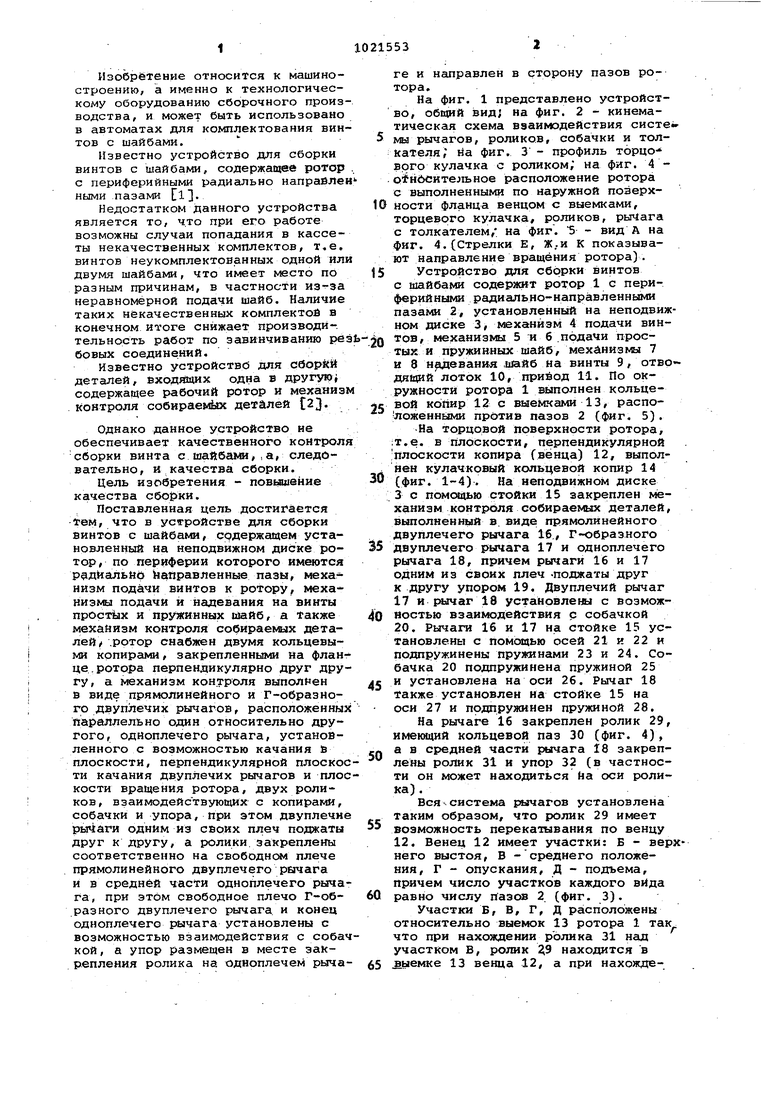
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| МАШИНА ДЛЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТАРЫ | 1969 |
|
SU244677A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |
| Машина для сшивки сетных полотен | 1970 |
|
SU346965A1 |
| Автомат для предмонтажной обработки электрических шнуров | 1988 |
|
SU1642542A1 |
| Стапелирующее устройство к прессу | 1976 |
|
SU716678A1 |
| Устройство для отделения плоских заготовок от стопы | 1986 |
|
SU1393505A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ КРУГЛОВЯЗАЛЬНОЙ МАШИНЫ | 1973 |
|
SU390216A1 |
| Устройство для завертывания штучных изделий | 1979 |
|
SU787273A1 |
| МАШИНА ДЛЯ СМЕНЫ БОБИН У ВАТЕРМАШИНЫ | 1926 |
|
SU13054A1 |
УСТРОЙСТбО ДЛЯ СБОРКИ ВИН ТОВ С tOAflBAtlH;- содержацее ротор с пёрнфернйными раднально направленными паз at к механизм контроля со бнраекшх деталей, о.т л и ч а torn е е с я , .iiTO, с целью повышення качества сборки, ротор снабжен двумя кольцевыми копиргти, зак репленными на фланцб ротора перпен дикулярно дауг другу, а механизм контроля выполиен в виде прямолинейного и Гг-образного двуплечих рычагов, расположенных парашюльнЬ ода1н относительно другого, однопле чегй Ёзычага, устано19 ленного с возможностью качания в плоскости, перпендикулярной плоскости качания двухплёчих Ф«1чагов, и плоскости вращения ротора, двух роликов, взанмодцействукй(нх с копиргими, собачки и упора, йри 9том дауплечиё рычаги одним из своих плеч тюджаты дфуг к другу, а ролики закреплены соответственно на свободном плече прямолинейного двуплечего рычага и в средней части одноплечего рычага, при этом свободное плечо Гтобразного двуплечего рычага и конец одноплечего рычага устансявйеис с возможностью взаимодейст1Ьня с с6бачкой, а упс размецен в месте закрепления ролнка на одноплечем рычаге и направлен в стсфону ро.тора. .,.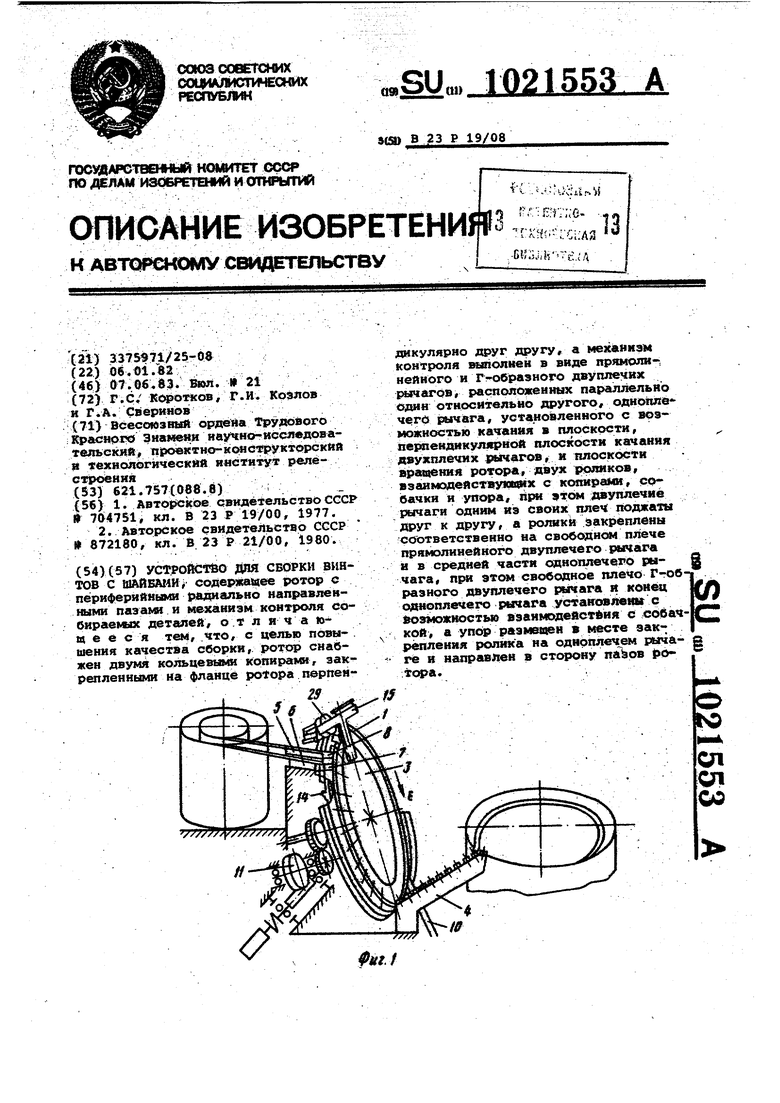
19
