Изобретение относится к области машиностроение и может быть использовано в манипуляторах промшоленных роботов. Известен хобот манипулятора, содержащий приводы, систему подвода рабочей среды и шариирно соединенные между собой звенья, на которых разметены цапфы для крепления элементов привода fl. Недостатком известного хобота манипулятора является плохие условия эксплуатации. Цель изобретения - улучшение усло вий эксплуатации. Цель достигается тем, что хобот манипулятора, содержащий приводы, систему подвода рабочей среды и шарнирно соединенные между собой звенья на которых размещены цапфы для крепления элементов привода, выполненного Из модулей, при этом модуль привода снабжен упругим элементом, гибкой лентой, шарнирно закрепленной в цапфах крепления элементов привода эластичной пластиной, соединенной с гибкой лентой и закрепленной на звене, и эластичным баллоном, соединенным с системой подвода рабочей среды и размещенным между эластичной пластиной и гибкой лентой. На чертеже изображен предлагаемый хобот манипулятора. Хобот манипулятора содержит шарнирно соединенные между собой звенья 1 - 4, на стойках 5 - 7 которых--расположены цапфы 8-10 для крепления соседних звеньев с установленными на них цапфами 11 для крепления элементов привода, и привод, выполненный в виде модулей 12, каждый из которых содержит гибкую ленту 13, например стальную, шарнирно закрепленную в цапфах 11 для крепления элементов привода, соединенную с эластичными упругими пластинами 14, закрепленными на стойках 5-7 звеньев и совместно с лентой образующими полость 15, в которой установлен рабочий элемент 16, выполненный, например, в виде эластичного баллона 17, соединенного с системой подвода рабочей среды ( на чертеже не показана), Модули 12 на каждом из звеньев установлены попарно и симметрично относительно продольной оси стойки с упругими элементами 18, выполненными, например, в виде пружин, закрепленными также в цапфах крепления элементов привода, установленных на соседних звеньях. Хобот манипулятора работает следующим образом. В исходном состоянии упругие элементы 18 сжаты. При подаче в один из баллонов 17 рабочей среды под определенным рабочим давлением вследствие того, что баллон 17 ограничен эластичными пластинами 14, он будет заполнять полость 15 и способствовать изгибу ленты 13, что обеспечивает поворот одного из звеньев относительно другого на определенный угол. Возврат звеньев в исход1 ое состояние осуществляется за счет сжатия упругих элементов 18. Применение предлагаемой схемы хобота манипулятора в промышленных роботах позволяет последним работать в широком диапазоне пространства, при этом обеспечивается высокий уровень технического обслуживания и улучшаются условия эксплуатации вследствие применения модульной компановки хобота манипулятора, основного механического узла промышленного робота, облегчгиощей и обеспечивающей быструю и простую сМену отдельных элементов манипуляторов, что в свою очередь обеспечит более ритмичную работу робототехнического комплекса .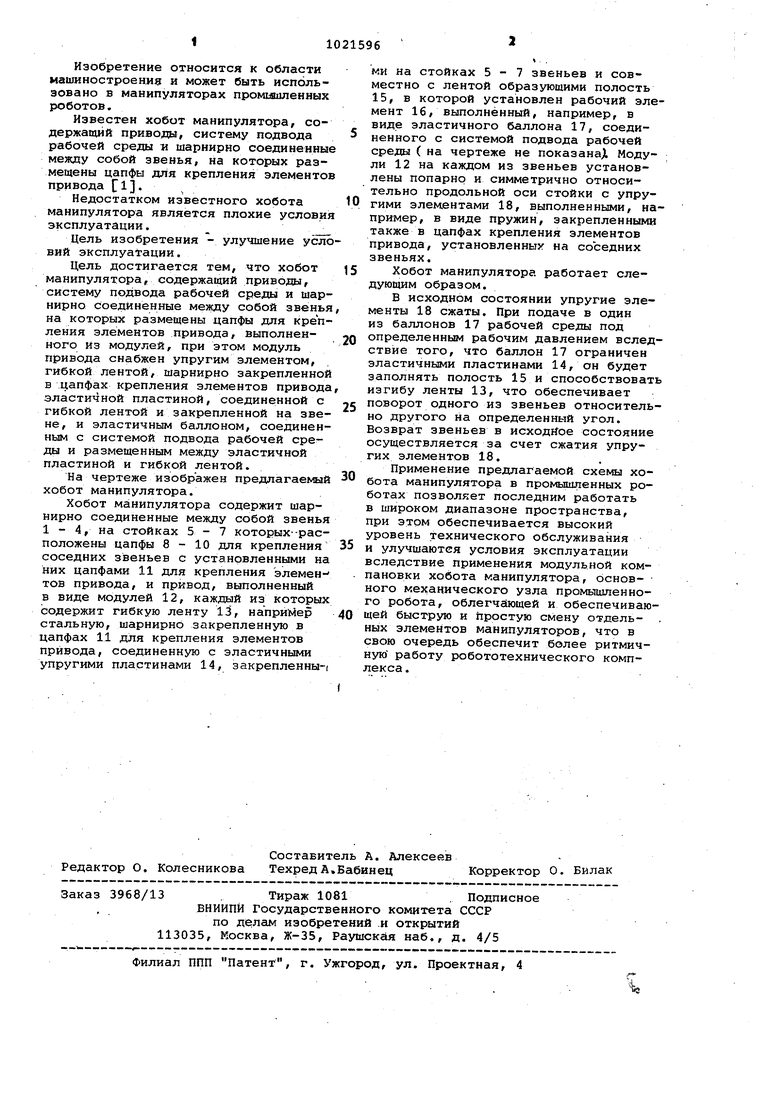
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1985 |
|
SU1283079A1 |
| Хобот манипулятора | 1983 |
|
SU1127763A2 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ РОБОТ | 2011 |
|
RU2492620C2 |
| Захватное устройство манипулятора с рабочим элементом из электропроводящего гибкого углеродного материала | 2020 |
|
RU2743441C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| СИСТЕМА И СПОСОБ ДОЗАПРАВКИ СПУТНИКОВ | 2008 |
|
RU2478534C2 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| ХОБОТ МАНИПУЛЯТОРА | 1992 |
|
RU2008201C1 |
ХОБОТ МАНИПУЛЯТОРА, содержащий приводы, систему подвода рабочей среды и шарнирио соединенные между собой звенья, на которых раамевдены цапфы для крепления элементов привода, выполненного из модулей, о т л и ч а го щ и и с я тем, что, с целью улучшения условий эксплуатации, модуль привода снабжен упругим элементом, гибкой лентой, шарнирио закрепленной в цапфах, эластичной пластиной, соединенной с гибкой лентой и закрепленной на звене, и эластичным баллоном, соединенным с системой подвода рабочей среды и размещенным меи{ду эластичной пластиной и гибкой лентой.