Изобретение относится к роботостроению, а именно к области оснащения манипуляторов роботов захватными приспособлениями.
Устройство может быть использовано в качестве универсальной захватной головки манипулятора, способной обеспечить возможность захвата различных предметов и/или надежное сцепление с ними, что может найти свое применение при производстве роботов, способных оперировать предметами, имеющими как большие габариты, так и нестандартные геометрические формы, изготовленными из магнитных и немагнитных материалов, а также при производстве мобильных аппаратов, способных перемещаться в сложных условиях, в том числе по вертикальным поверхностям и поверхностям с отрицательным углом наклона.
В известных устройствах для захвата предметов манипуляторами или для сцепления с ними используются захватные головки с пальцевыми органами [1 Патент РФ №2381892 от 20.02.2010], вакуумными [2 Патент РФ №2397857 от 27.08.2010] или магнитными [3 Патент RU №2016757от 30.07.1994] держателями. Недостатком этих устройств является ограниченность сферы их применения. Применение устройств с пальцевыми органами ограничено габаритными размерами и геометрической формой захватываемых предметов, устройств с вакуумными держателями - геометрической формой предметов и качеством обработки их поверхности, устройств с магнитными держателями - магнитными свойствами материала предметов.
Известно несколько разновидностей конструкций захватных головок, в которых для обеспечения сцепления с объектами используется эффект поверхностного натяжения конденсата, специально создаваемого на рабочей поверхности захватной головки, и эффект примерзания объекта к захватной головке при ее охлаждении. Так, устройство «Капиллярный микрозахват с обратной связью» [4 Патент РФ №2261795 от 10.10.2005] содержит основание, крепежное приспособление. Основание выполнено из электроизоляционного материала с высокой теплопроводностью, на которое с рабочей поверхности в сеточном порядке установлены конденсаторы влаги, выполненные в виде термоэлектрических модулей на основе эффекта Пельтье. Между конденсаторами влаги в решетчатом порядке размещены электропроводниковые пластины. По контуру основания установлены электроды. Принцип работы устройства основан на эффектах поверхностного натяжения (капиллярных силах), когда жидкость между двумя поверхностями создает адгезионную силу, приводящую к сцеплению поверхностей. Природа этих сил определяется межмолекулярными взаимодействиями и структурой поверхностного слоя. В качестве жидкости, создающей силу сцепления, используется конденсат, который образуется на поверхности конденсаторов влаги.
Недостатком данного микрозахвата является ограниченность применения устройства, связанная с небольшими габаритными размерами и малым весом захватываемых предметов.
В качестве прототипа настоящего изобретения использовано "Захватное устройство робота" [5 Патент РФ №2320475 от 27.03.2008]. В этом устройстве для обеспечения захвата используется пропитанное рабочей жидкостью пластичное губчатое вещество. Непосредственно фиксация захвата производится при охлаждении рабочей жидкости до ее затвердевания, при этом объект захвата примерзает к пластичному губчатому веществу. Захватное устройство манипулятора робота снабжено термоэлектрической батареей (ТЭБ), запитанной постоянным электрическим током, и емкостью, заполненной легко испаряющимся теплоносителем. Первые спаи ТЭБ находятся в тепловом и механическом контакте с поверхностью крепежного механизма, а вторые спаи - с одной из поверхностей упомянутой емкости, на противоположную поверхность которой нанесено пластичное губчатое вещество. Причем ТЭБ работает в режиме охлаждения при захвате, перемещении и позиционировании объекта и в режиме нагрева при съеме объекта захвата, а манипулятор и крепежный механизм выполнены с каналами для прокачки через них охлаждающей жидкости. Внутренняя поверхность емкости может быть выполнена с оребрением.
Недостатками указанного устройства являются повышенный расход рабочей жидкости, доставка которой к месту использования не предусмотрена, необходимость периодической заправки легкоиспаряющимся теплоносителем, повышенный расход электроэнергии, используемой для постоянно чередующихся процессов нагрева и охлаждения теплоносителя, низкая по сравнению предлагаемым устройством прочность сцепления с объектом захвата.
Предлагаемое изобретение позволяет преодолеть указанные выше ограничения и недостатки и создавать универсальные захватные устройства, которые могут работать с разными типами объектов, в том числе с крупногабаритными предметами и мелкими предметами, с предметами со сложной геометрической формой, с пористой или шероховатой поверхностью, с предметами, изготовленными из немагнитных материалов. При этом нет необходимости в замене захватной головки каждый раз при смене типа захватываемого объекта, что повышает производительность робота и расширяет область его возможного применения.
В предлагаемом техническом решении для обеспечения надежности захвата и прочности сцепления с захватываемым предметом в качестве рабочей среды может использоваться вещество, которое при нормальных условиях пребывает в твердом состоянии в виде гранул, порошка или другом измельченном виде, помещенное в корпусную емкость захвата, при этом рабочим элементом, который вступает в непосредственный механический контакт с захватываемым объектом, является электропроводящий гибкий углеродный материал, который одновременно является и нагревательным элементом для плавления клеящего вещества, и транспортирующим элементом для доставки рабочей среды на место контакта с захватываемым объектом. В условиях низких температур (ниже 10°С) в качестве рабочей среды может применяться дистиллированная вода. После фиксации объекта захвата для его дальнейшего удержания не требуются дополнительные энергозатраты. В условиях исключения следов клеящего вещества на объекте, в качестве рабочей среды применяются быстроиспаряющиеся вещества, например нафталин. В условиях термического склеивания в качестве рабочей среды может использоваться клей-расплав, который обладает повышенной адгезией, что способствует повышению надежности сцепления объекта с рабочей поверхностью захватной головки манипулятора. В предлагаемом техническом решении клей-расплав является расходным материалом, который в исходном состоянии представляет собой гранулы или порошок. Нагрев электропроводящего гибкого углеродного материала, имеющего форму полоски необходимой и достаточной длины и ширины, осуществляется путем подачи на концы полоски электрического напряжения через контактные площадки. Доставка клея-расплава на место контакта с объектом происходит за счет силы тяжести и эффекта смачивания электропроводящего гибкого углеродного материала клеем-расплавом. Таким образом, в отличие от прототипа и других подобных устройств, предлагаемое устройство имеет более простую конструкцию, поскольку дополнительные механизмы для подачи рабочей среды (насосы, питатели, экструдеры, какие-либо движущиеся детали и механизмы), а также термоэлектрические батареи в захватной головке отсутствуют, а для плавления и транспортировки рабочей среды используются неподвижные полоски электропроводящего гибкого углеродного материала, смачиваемые этой рабочей средой. Для повышения быстродействия устройства может применяться дополнительный электронагревательный элемент в виде металлической пластины или спирали, помещенный в емкость с рабочей средой: гранулами, порошком или твердым веществом в другом измельченном виде.
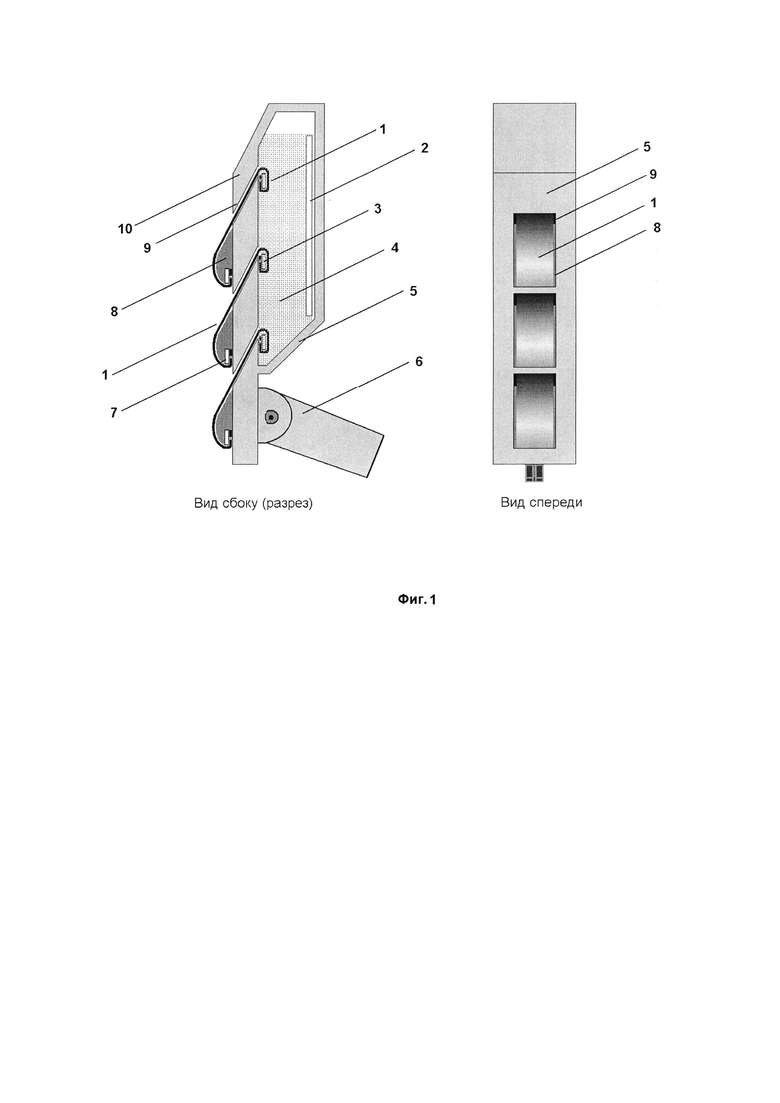
Конструкция «Захватного устройства манипулятора с рабочим элементом из электропроводящего гибкого углеродного материала» показана на чертеже (Фигура 1, вид сбоку и вид спереди).
1 - полоски электропроводящего гибкого углеродного материала; 2 - нагревательный элемент; 3 - верхняя контактная площадка и место крепления полосок углеродной ткани; 4 -рабочая среда; 5 - корпусная емкость захвата; 6 - рычаг манипулятора; 7 - нижняя контактная площадка и место крепления полосок электропроводящего гибкого углеродного материала; 8 - эластичная термостойкая накладка; 9 - наклонные прорези в передней стенке захвата; 10 -передняя стенка корпусной емкости захвата.
Вид спереди захвата показывает лицевую (рабочую) сторону захвата, т.е. ту его сторону, которая приклеивается или примерзает к захватываемому объекту.
Корпусная емкость захвата изготовлена из термостойкого диэлектрика с низким коэффициентом теплопроводности. Термостойкость материала корпусной емкости зависит от температуры плавления рабочей среды. При условии применения в качестве рабочей среды термоклея различных марок, материал корпусной емкости выполняется из соответствующего температуре плавления термоклея (от 150-170°С и выше) термостойкого материала. Наиболее подходящие материалы - фторопласты различных марок, стеклотекстолит, термостойкие пластики и композиты. При условии применения в качестве рабочей среды дистиллированной воды для прилипания, в случае низких рабочих температур, требование термостойкости к материалу корпусной емкости отсутствует.
Накладки на рабочей (лицевой) стороне захвата могут быть выполнены в виде упругих подушечек, изготовленных из эластичного термостойкого материала, например, из термостойкой резины или силикона. Конструктивно накладки размещаются под полосками электропроводящего гибкого углеродного материала и прилегают непосредственно к лицевой пластине корпусной емкости захвата, к которой они жестко прикреплены (например, с помощью клеевого соединения). Наличие накладок, способных упруго деформироваться при прижатии захвата к захватываемому объекту, увеличивает площадь механического контакта поверхности полосок с поверхностью объекта, что обеспечивает большую надежность и прочность захвата.
Основу конструкции захвата составляют полоски электропроводящего гибкого углеродного материала. При этом конструкция захвата допускает возможность применения самого разного количества полосок. Размеры полосок могут быть самые разные, например: 10×100 мм, 15×100 мм, 50×200 мм, и т.д. Форма полосок преимущественно квадратная или прямоугольная. На приведенном чертеже показан вариант захвата с тремя полосками. Каждая полоска электропроводящего гибкого углеродного материала пропущена через наклонную прорезь, сделанную в пластине, одна сторона которой является рабочей стороной захвата, а другая представляет собой внутреннюю стенку корпусной емкости с рабочей жидкостью, при этом один конец каждой полоски находится в корпусной емкости с рабочей жидкостью, а другой конец находится на рабочей стороне захвата. В качестве электропроводящего гибкого углеродного материала могут применяться углеродные ленты, ткани, углеродный войлок, иглопробивной углеродный нетканый материал.
Предлагаемый захват работает следующим образом.
1. При условии применения в качестве рабочей среды термоклея, при подаче на полоски электропроводящего гибкого углеродного материала 1 через контактные площадки 3 и 7 электрического напряжения происходит разогрев полосок и расплавление той части термоклея, которая находится как в канале каждой наклонной прорези 9, так и на наружной части полосок. В зависимости от температуры плавления и теплоемкости термоклея (или другой рабочей жидкости) для ускорения его плавления в емкости 4 и повышения быстродействия устройства, напряжение может подаваться также на дополнительный электронагревательный элемент 2. Благодаря силе тяжести и эффекту смачивания электропроводящего гибкого углеродного материала жидкий термоклей постепенно поступает по полоскам и накапливается на той их части, что находится поверх накладок 8. После накопления достаточной порции клея манипулятор с помощью рычага 6 прижимает рабочую поверхность захвата к объекту. После выключения тока клей остывает и отвердевает, тем самым обеспечивая необходимое сцепление. Эластичные накладки, поверх которых закреплены выступающие части полосок электропроводящего гибкого углеродного материала, способствуют увеличению площади контакта между объектом и захватом, а высокая механическая прочность электропроводящего гибкого углеродного материала обеспечивает прочность и надежность самого сцепления. Для освобождения захвата полоски электропроводящего гибкого углеродного материала разогреваются, для чего на них снова подается электрическое напряжение, тонкий слой клея-расплава, находящегося между выступающими частями полосок и поверхностью захваченного объекта, расплавляется, сцепление между ним и захватом ослабевает, что приводит к освобождению захваченного объекта.
2. При условии применения в качестве рабочей среды дистиллированной воды подготовка устройства к работе может осуществляться при температуре окружающей среды выше температуры замерзания воды, например, при комнатной температуре. Дистиллированная вода заливается в корпусную емкость захвата. При низких рабочих температурах вода замерзает на рабочей поверхности захвата, что обеспечивает примерзание захвата к объекту. В остальном порядок работы захвата аналогичен п. 1.
3. При условии применения в качестве рабочей среды быстроиспаряющихся веществ порядок работы захвата также аналогичен п. 1, при этом для обеспечения в последующем отсутствия следов клеящего вещества на захватываемом объекте (например, для сохранения товарного вида объекта), в качестве рабочей среды применяется вещество, которое быстро испаряется, находясь в твердой фазе, а помещение, в котором производятся работы, имеет вентиляционную систему, достаточную для улавливания и/или удаления испарений.
Выводы.
Техническим результатом изобретения является универсальность устройства по сравнению с имеющимися аналогами, простота конструкции устройства, что позволяет изготовить класс манипуляторов для роботов с более высокой производительностью, при этом менее энергозатратных.
Источники информации
1. Патент РФ №2381892, МПК B25J 15/08, он. 20.02.2010 года, З..№2008120424 от 22.05.2008 года,
2. Патент РФ №2397857, МПК B25J 15/06, он. 27.08.2010 года, З.№2008126662 от 30.06.2008 года,
3. Патент RU №2016757, МПК B25J 15/06, оп.30.07.1994 года, З.№4812228 от 09.04.1990 года.
4. Патент РФ №2261795, МПК B25J 15/00, оп.10.10.2005 года, З.№2004105379 от 24.02.2004 года,
5. Патент РФ №2320475, МПК B25J 15/00, оп.23.07.2008 года, З.№2005137510 от 01.12.2005 года,
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ЗАХВАТ | 2016 |
|
RU2624278C1 |
| АВТОНОМНАЯ СБОРОЧНАЯ МОДУЛЬНАЯ ЯЧЕЙКА | 2021 |
|
RU2755994C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| СПОСОБ РАБОТЫ ЗАХВАТА МАНИПУЛЯТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2603741C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ИЗГОТОВЛЕНИЯ ЛЕНТЫ С НИТЯМИ ВИЗУАЛИЗАЦИИ ВОЗДУШНЫХ ПОТОКОВ НА АЭРОДИНАМИЧЕСКИХ ПОВЕРХНОСТЯХ | 2004 |
|
RU2344398C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО С ПОДВИЖНОЙ КОНСТРУКЦИЕЙ, ТАКОЕ КАК РОБОТ | 2018 |
|
RU2763460C2 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| Захватное устройство | 1991 |
|
SU1821359A1 |
Изобретение относится к роботостроению и может быть использовано в захватных устройствах манипуляторов. Захватное устройство содержит корпусную емкость с рабочей контактной площадкой, заполненную рабочей средой. Контактная площадка выполнена в виде одной из сторон емкости и имеет наклонные прорези. Предусмотрен рабочий элемент в виде полосок электропроводящего гибкого углеродного материала, пропущенных через наклонные прорези и закрепленных с возможностью подвода к ним электрического напряжения в местах крепления. Места крепления размещены на внешней и внутренней сторонах контактной площадки. На корпусной емкости под полосками из электропроводящего гибкого углеродного материала расположены накладки в виде упругих подушечек из эластичного термостойкого материала. Полоски выполнены с возможностью смачивания их рабочей средой и транспортирования рабочей среды на место контакта с захватываемым объектом. В корпусной емкости расположен нагревательный элемент. В результате обеспечивается возможность захвата объектов различной формы и размеров. 5 з.п. ф-лы, 1 ил.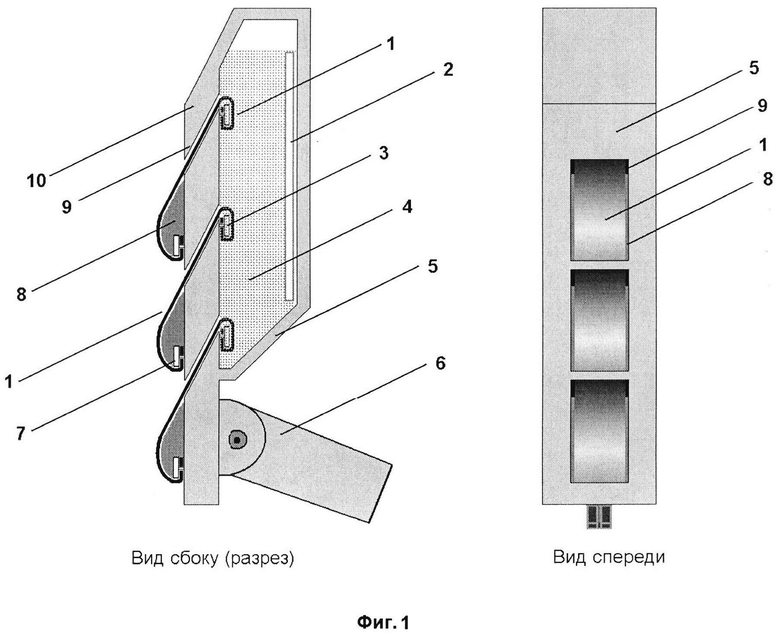
1. Захватное устройство манипулятора, содержащее корпусную емкость с рабочей контактной площадкой, заполненную рабочей средой, рабочий элемент, нагревательный элемент и рычаг, отличающееся тем, что рабочая контактная площадка выполнена в виде одной из сторон корпусной емкости и имеет наклонные прорези, а рабочий элемент выполнен в виде полосок электропроводящего гибкого углеродного материала, пропущенных через наклонные прорези и закрепленных с возможностью подвода к ним электрического напряжения в местах крепления, расположенных на внешней и внутренней сторонах рабочей контактной площадки, и накладок в виде упругих подушечек из эластичного термостойкого материала, размещенных на корпусной емкости под упомянутыми полосками из электропроводящего гибкого углеродного материала, при этом последние выполнены с возможностью смачивания их рабочей средой и транспортирования рабочей среды на место контакта с захватываемым объектом, а нагревательный элемент расположен в корпусной емкости.
2. Захватное устройство по п. 1, отличающееся тем, что корпусная емкость выполнена из термостойкого диэлектрического материала.
3. Захватное устройство по п. 1 или 2, отличающееся тем, что использован электропроводящий гибкий углеродный материал в виде ленты, или войлока, или иглопробивного нетканого материала.
4. Захватное устройство по любому из пп. 1-3, отличающееся тем, что в качестве рабочей среды использована дистиллированная вода.
5. Захватное устройство по любому из пп. 1-3, отличающееся тем, что в качестве рабочей среды использован термореактивный клей, находящийся в твердом состоянии в виде гранул или порошка и переходящий в жидкое состояние при температуре плавления.
6. Захватное устройство по любому из пп. 1-3, отличающееся тем, что в качестве рабочей среды использовано быстроиспаряющееся вещество.
| ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА | 2005 |
|
RU2320475C2 |
| Захват | 1985 |
|
SU1283094A1 |
| US 4968018 A1, 06.11.1990 | |||
| US 9573280 B2, 21.02.2017. | |||

