Изобретение относится к общему машиностроению и может быть использовано в манипуляторах промышленных роботов.
По основному авт. св. № 1021596, известен хобот манипулятора, содержаш.ий приводы, систему подвода рабочей среды и шарнирно соединенные между собой звенья, на которых размеш.ены цапфы для крепления элементов привода, при этом привод выполнен из модулей, снабженных элементом, гибкой лентой, шарнирно закрепленной в цапфах для крепления элементов привода, эластичной пластиной, соединенной с гибкой лентой и закрепленной на звене, и эластичным баллоном, соединенным с системой подвода рабочей среды и размещенным между эластичной пластиной и гибкой лентой 1.
Недостатком известного устройства является недостаточная его надежность. В процессе поворота каждого из. звеньев хобота манипулятора момент движуших сил, определяемый силой натяжения в гибкой ленте, направленной по касательной к ленте в точке крепления гибкой ленты с соседним звеном, и расстоянием, отсчитанным по перпендикуляру, опушенному из центра шарнира соседних звеньев на касательную к ленте в точке крепления ленты с соседним звеном, уменьшается вследствие того, что в результате изгиба ленты расстояние, отсчитанное по перпендикуляру из центра шарнира соседних звеньев на касательную к ленте в точке крепления ленты с соседним звеном, уменьшается вплоть до нуля.
При этом для обеспечения нормальной работы хобота манипулятора увеличиваются нагрузки, действующие на элементы модулей привода. Все это снижает надежность работы хобота манипулятора.
Целью изобретения является повышение надежности хобота манипулятора в работе,
Указанная цель достигается тем, что в хоботе манипулятора, содержашем приводы, систему подвода рабочей среды и шарнирно соединенные между собой звенья, на которых размещены цапфы для крепления элементов привода, при этом привод выполнен из модулей, снабженных упругим элементом, гибкой лентой, шарнирно закрепленной в цапфах для крепления элементов привода, эластичной пластиной, соединенной с гибкой лентой и закрепленной на звене, и эластичным баллоном, соединенным с системой подвода рабочей среды и размещенным между эластичной пластиной и гибкой лентой, цапфы для крепления элементов привода в месте крепления гибкой ленты модуля с соседними звеньями выполнены Б виде жесткой пластины, установленной с возможностью вращения вокруг оси, проходящей через центр шарнира соседних
звеньев, и расположенной в плоскости, перпендикулярной продольной оси соседнего звена, при этом ось шарнирной связи гибкой ленты модуля смещена относительно центра шарнира соседних звеньев в сторону соседнего звена.
На фиг. 1 изображен хобот манипулятора, общий вид.
Хобот манипулятора содержит шарнирно соединенные между собой звенья 1---4,на стойках 5-7 которых расположены цапфы для крепления соседних звеньев с установленными на них цапфами 11 и 12 для крепления элементов привода, и привод, выполненный в виде модулей 13 и 14. Модули 13 и 14 содержат гибкую ленту 15, например, стальную, шарнирно закрепленную в цапфах для крепления элементов привода 11 и 12, соединенную с эластичными упругими пластинами 16, закрепленными на стойках 5 и 6 и совместно с лентой образуюшими полость 17, в которой установлен рабочий элемент 18, выполненный, например, в виде эластичного баллона 19, соединенного с системой подвода рабочей среды (не показана). Модули 13 на звене 2 и модули 14 на звене 3 установлены попарно и симметрично относительно продольных осей 20 и 21 звеньев 2 и 3, при этом плоскости, в которых установлены попарно модули, перпендикулярны между собой.
Цапфы для крепления элементов привода 12 в месте крепления гибкой ленты 15 модуля 13 со звеном 3 и гибкой ленты 15 модуля 14 со звеном 4 выполнены в. виде жестких пластин 22, установленных с возможностью вращения вокруг осей 23 и 24, проходящих через центры щарниров 25 и 26 соседних звеньев 2 и 3 и 3 и 4. Оси 23 и 24 ориентированы в плоскостях, перпендикулярных продольным осям 21 и 27 звеньев 3 и 4.
Гибкие ленты 15 модулей 13 закреплены на пластинах 22 посредством шарниров
28,например цилиндрических, оси которых смещены относительно центра шарнира 25 соседних звеньев 2 и 3 в сторону звена
Гибкие ленты 15 модулей 14 закреплены на пластинах 22 посредством шарниров
29,например цилиндрических, оси которых смещены относительно центра шарнира 26 в сторону звена 4.
Хобот манипулятора работает следующим образом.
Для поворота, например, звена 2 относительно звена 3, подают в один или несколько баллонов 19, модулей 13 рабочую среду под определенным рабочим давлением, вследствие того, что баллон 19 ограничен эластичными упругими пластинами 16, баллоны заполняют полость 17 и способствуют изгибу гибкой ленты 15, при этом давление в дугих баллонах 19 модулей 13 также изменяется, уменьшается или увеличивается в зависимости от необходимого положения звена 2 относительно звена 3.
При этом в результате того, что оси шарниров цапф для крепления элементов привода в местах крепления гибких лент модулей с соседними звеньями в процессе работы смешены в стороны соседних звеньев, увеличивается расстояние, отсчитанное по перпендикуляру, проведенному из центров
шарнира соседних звеньев на касательную к ленте в точке крепления ленты с соседним звеном, что обеспечивает при равных углах поворота звеньев больший движущий момент сил.
А это позволяет снизить нагрузки, действующие на элементы модулей хобота манипулятора при тех же внешних силах, действующих на хобот манипулятора, что повышает надежность работы элементов хобота манипулятора.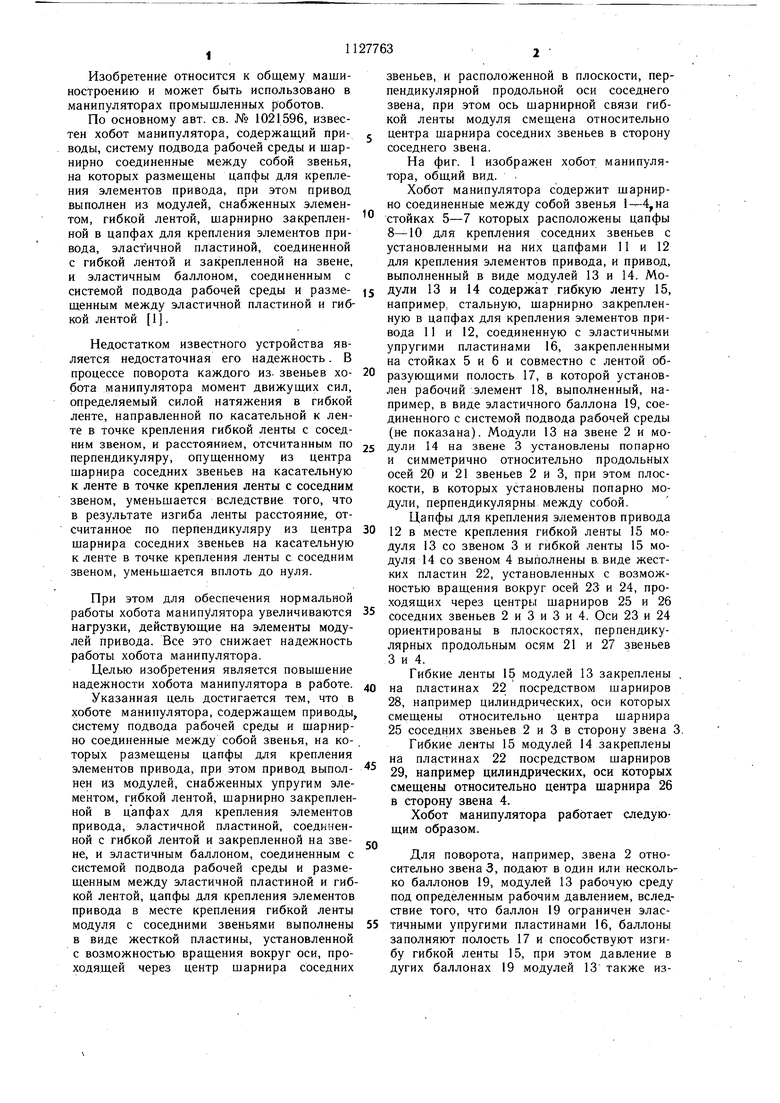
| название | год | авторы | номер документа |
|---|---|---|---|
| Хобот манипулятора | 1982 |
|
SU1021596A1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1283079A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| Хобот манипулятора | 1982 |
|
SU1085802A2 |
| Модуль манипулятора | 1985 |
|
SU1283086A1 |
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
| Хобот манипулятора | 1979 |
|
SU870107A1 |
| Рука манипулятора | 1984 |
|
SU1283077A1 |
| Рука манипулятора | 1984 |
|
SU1248792A1 |
ХОБОТ МАНИПУЛЯТОРА по авт. св. № 1021596, отличающийся тем, что, с целью, повышения надежности его в работе, цапфы для крепления элементов привода в месте крепления гибкой ленты модуля с соседними звеньями выполнены в виде жесткой пластины, установленной с возможностью вращения вокруг оси, проходящей через центр щарнира соседних звеньев, и расположенной в плоскости, перпендикулярной продольной оси соседнего звена, при этом ось щарнирной связи гибкой ленты модуля смещена относительно центра щарнира соседних звеньев в сторону соседнего звена. I ff 13 tc vj a CO t6 to 23
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хобот манипулятора | 1982 |
|
SU1021596A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
