Изобретение относится к машиностроению, и может быть использовано в манипуляторах промьпппенных роботов.
Целью изобретения является повышение точности позиционирования за счет исключения воздействия со стороны рабочего баллона одного на элементы другого звена.
На чертеже изображен исполнитель- ньй орган манипулятора, общий вид.
Исполнительный орган манипулятора содержит шарнирно соединенные между собой звенья 1,2 и 3, на стойках 4,5 и 6 которых расположены цап- фы 7 и 8 для крепления соседних звеньев с установленными на них цапфами 9 для крепления элементов приводов, основной 10- и дополнительный 1 приводы каждого звена, выполненные из аналогичньк модулей, каждый из которых содержит соответственно гибкие ленты 12 и 13, например стальные, шарнирно закрепленные в цапфах
Исполнительньй орган манипулятора, содержащий приводы, систему подвода 25 рабочей среды и шарнирно соединенные между собой звенья, на которых размещены цапфы для крепления элементов основного привода, выполненного из модулей, причем модуль привода снабжен упругим элементом, гибкой лентой, шарнирно закрепленной в цапфах, эластичной пластиной, соединенной с гибкой лентой, и эластичным . баллоном, соединенным с системой подвода рабочей среды и размещенным меж30
9, установленных на смежных звеньях, а также шарнирно в средней части каждого звена, например, на стойке. Ленты 12 и 13 соединены соответственно с эластичными упругими пластинами 14 и 15, ,закрепленными на стойке 5 и совместно с лентой образуют полости 16 и 17, в которых установлены рабочие элементы 18 и 19, выполненные каж- дьй,например, в виде эластичного баллона, соединенного с системой подвода ДУ эластичной пластиной и гибкой ленрабочей среды (не показана).
Модули на каждом из звеньев установлены попарно и симметрично относительно продольной оси стойки с упру- Q гими элементами 20, вьтолненными, на- . пример, в виде пружин, закрепленных в цапфах 9 и шарнирно в средней части каждого звена.
Исполнительньй орган манипулятора работает следующим образом.
В исходном положении упругие элементы 20 сжаты. При подаче в эластой, отличающийся тем,, что, с целью повьш1ения точности позиционирования, каждое звено снабжено дополнительным приводом, выполненным из аналогичных указанным модулей, при этом гибкая лента модуля дополнительного привода шарнирно зак еплена в,цапфах смежного звена, а соответствующие концы гибких лент модулей основного и дополнительного приводов шарнирно связаны между собой И со средней частью этого звена.
Редактор И. Рыбченко
Составитель И. Бакулина
Техред,А.Кравчук. Корректор А. Обручар
Заказ 7343/13 . Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
.по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4,
тичный баллон 19 рабочей среды под определенным рабочим давлением заполняется полость 17, гибкий элемент 13 изгибается, что обеспечивает поворот звена 2 на определенный угол. Возврат звеньев в исходное состояние осуществляется за счет сжатия упругих элементов 20.
В результате того, что эластичные баллоны в процессе работы воздействуют только на элементы одного звена, исключаются дополнительные воздействия со стороны рабочего баллона на элементы другого звена хобота манипулятора f что тем самым обеспечивает более надежную и долговечную работу хобота манипулятора.
20
Форму Л а изобретения.
Исполнительньй орган манипулятора, содержащий приводы, систему подвода 5 рабочей среды и шарнирно соединенные между собой звенья, на которых размещены цапфы для крепления элементов основного привода, выполненного из модулей, причем модуль привода снабжен упругим элементом, гибкой лентой, шарнирно закрепленной в цапфах, эластичной пластиной, соединенной с гибкой лентой, и эластичным . баллоном, соединенным с системой подвода рабочей среды и размещенным меж0
ДУ эластичной пластиной и гибкой ленДУ эластичной пластиной и гибкой лентой, отличающийся тем,, что, с целью повьш1ения точности позиционирования, каждое звено снабжено дополнительным приводом, выполненным из аналогичных указанным модулей, при этом гибкая лента модуля дополнительного привода шарнирно зак еплена в,цапфах смежного звена, а соответствующие концы гибких лент модулей основного и дополнительного приводов шарнирно связаны между собой И со средней частью этого звена.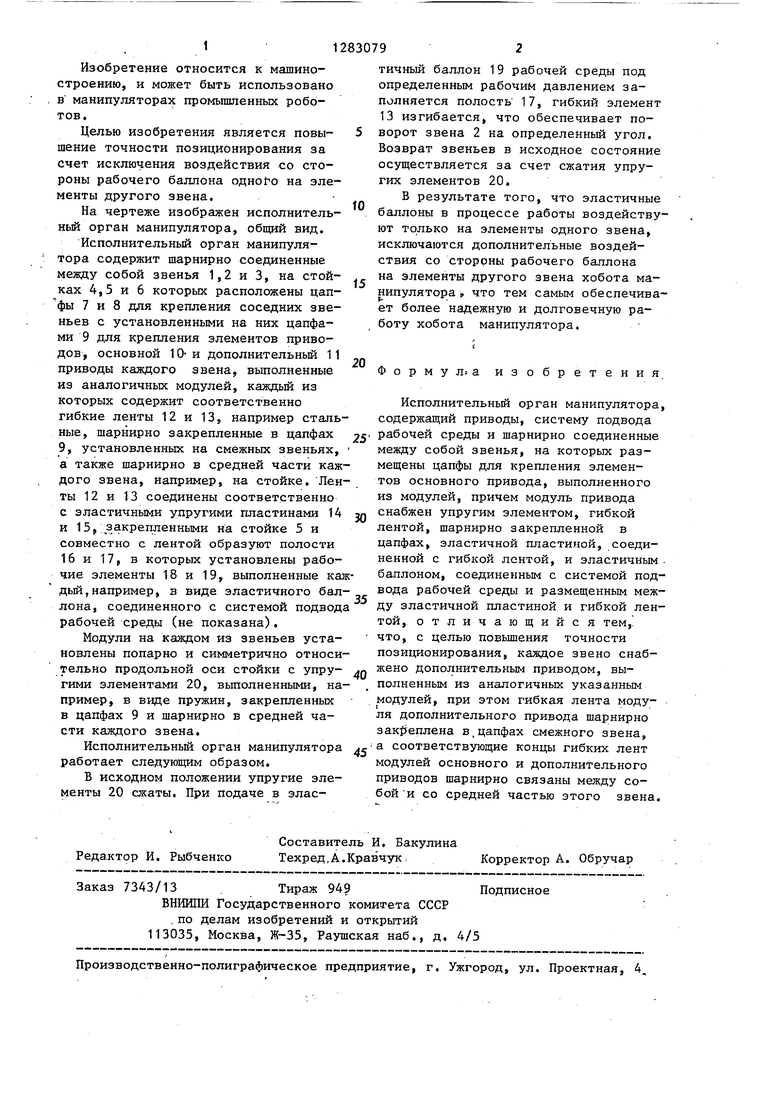
| название | год | авторы | номер документа |
|---|---|---|---|
| Хобот манипулятора | 1982 |
|
SU1021596A1 |
| Хобот манипулятора | 1983 |
|
SU1127763A2 |
| Исполнительный орган манипулятора | 1984 |
|
SU1227457A1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Рука манипулятора | 1983 |
|
SU1121132A2 |
| Хобот манипулятора | 1982 |
|
SU1085802A2 |
| Хобот манипулятора | 1990 |
|
SU1710333A1 |
Изобретение относится к области машиностроения и может быть использовано в манипуляторах промьшшенных роботой. Цель изобретения - повышение точности позиционирования за счет исключения воздействия со стороны рабочего баллона одного на элементы другого звена. Каждое звено содержит основной и дополнительный приводы, имеющие гибкие ленты 12 и 13, шарнирно закрепленные в цапфах 9, установленных на смежных звеньях, а также шарнирно в средней 1части каждого звена на стойке 5. При подаче в эластичный баллон 19 рабочей среды под определенным рабочим давлением заполняется полость 17, обеспечивающая изгиб гибкой ленты 13, что обеспечивает поворот звена 2 на определенный угол. 1 ил. с S (Л 1ЧЭ 00 00 о с&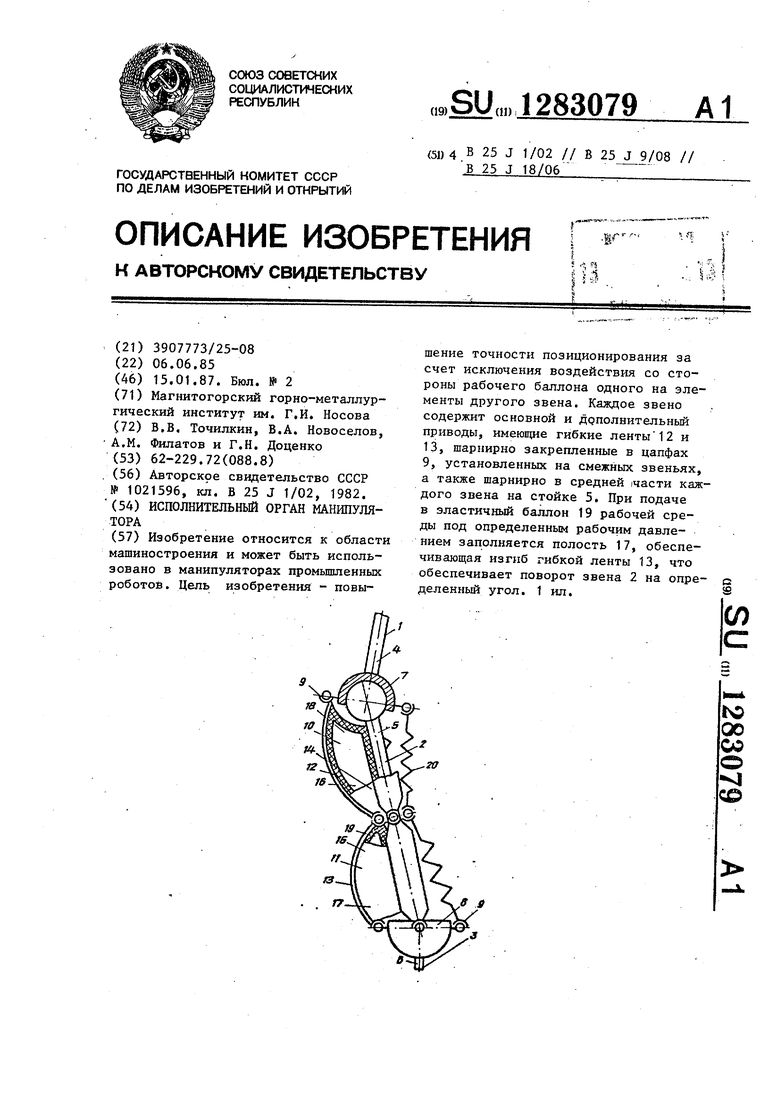
| Хобот манипулятора | 1982 |
|
SU1021596A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
