Изобретение относится к литейному производству и может быть использовано для автоматизации снятия заливов по наружному контуру отливки.
Цель изобретения - расширение технологических возможностей робота.
На фиг. 1 схематически изображен предлагаемый робот, боковой вид; на фиг. 2 - видА на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - вид Д на фиг. 5 ; на фиг. 7 - разрез Е-Е на фиг. 1; на фиг. 8 - разрез Ж-Ж на фиг. 1.
Робот (фиг. 1-3) содержит подъемно- поворотное основание 1, исполнительный механизм 2, компенсирующий механизм 3, подвеску 4, пневмосистему 5, дверки 6-9 и зажимы 10. Подъемно-поворотное основание 1 является опорой для исполнительного механизма 2, компенсирующего механизма
3, дверок 6-9 и служит для подъема и поворота дверок и перечисленных механизмов. Подъемно-поворотное основание 1 содержит крышку 11, рубашку 12, подъемный механизм 13, основание 14, воздухораспределитель 15, пневмоцилиндр 16, опорную пяту 17.
Крышка 11 закреплена на штоке 18 подъемного механизма 13, а на крышке 11 закреплены исполнительный механизм 2, компенсирующий механизм 3, пневмосистема 5, дверки 6-9.
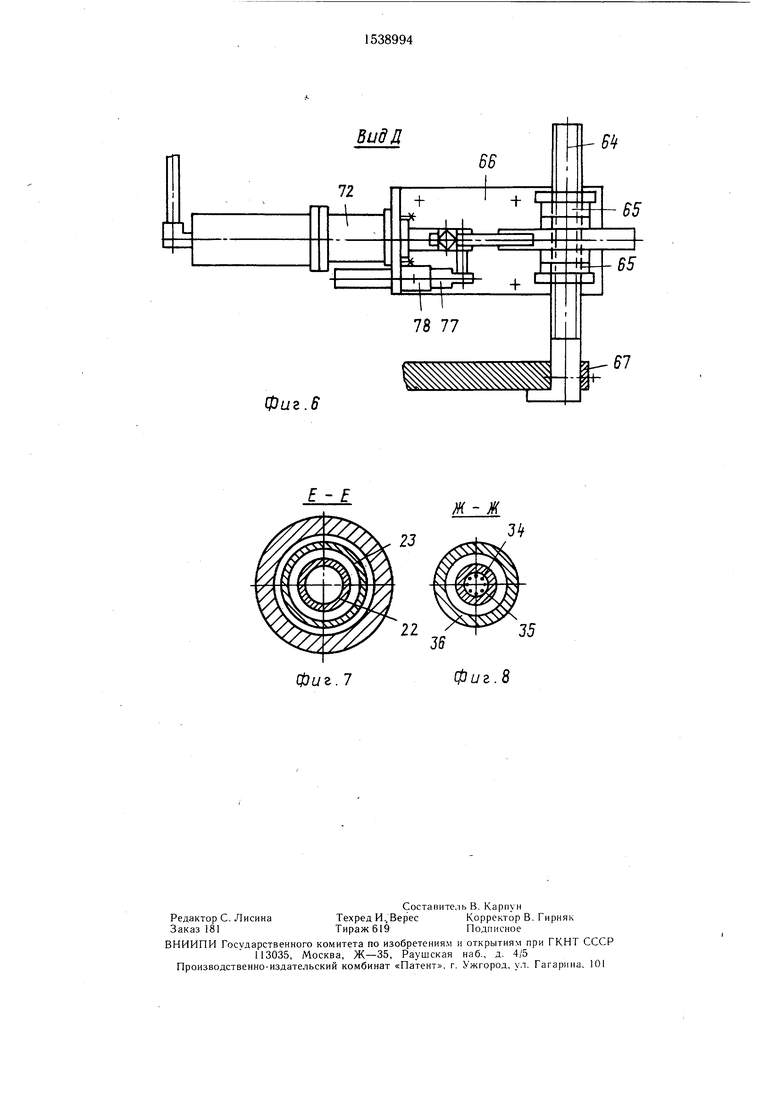
Рубашка 12 служит для повышения устойчивости робота и состоит из двух полуцилиндров 19, жестко между собой скрепленных, и упора 20 (фиг. 1 и 2) Подъемный механизм 13 состоит из пнегп- цилиндра 21, штока 18, имеющего гн1 для трубопроводов 22 и 23 (фш. ри трубопровода 23 размещен догю.ми.ч ный трубопровод 22 для рабочей жидкости
СЛ
со
00
со
СО 4
или сжатого воздуха. Задняя крышка 24 (фиг. 1) пневмоцилиндра 21 имеет подшипниковую опору 25, размещенную в опорной пяте 17, и шестерню 26, соединенную со шток-рейкой 27 пневмоцилиндра 16, служащего для поворота исполнительного механизма 2, компенсирующего механизма 3, пневмосистемы 5, дверок 6-9.
Основание 14 робота прикреплено к подставке 28, которая закреплена на фундаменте. К основанию 14 прикреплена колонна 29, на которой свободно сидит рубашка 12 с крышкой 11. На колонне 29 закреплен пневмоцилиндр 16 с кронштейном 30 и распределителем 31. Внутри колонны 29 размещены трубопровод 32 для сжатого воздуха, который соединен с внутренней полостью направляющей 33, и электропроводы 34 (фиг. 8), проходящие в трубе 35 сквозь направляющую 36. Опорная пята 17 жестко скреплена с колонной 29 (фиг. 1) и основанием 14, на котором закреплен воздухораспределитель 15. Шток 37 (фиг. 2) воздухораспределителя 15 контактирует с порой 20. Пружины 38 и 39 (фиг. 1), находящиеся на штоке 18 между крышкой 11 и передней крышкой 40 пневмоцилиндра 2, служат для подъема исполнительного механизма 2, компенсирующего механизма 3 и пневмосистемы 5 для предотвращения аварийной ситуации в случае отсутствия сжатого воздуха в системе.
Гайка 41 закрепляет пневмоцилиндр 21, сжатый воздух к которому подводится через трубу 42 в штоковую полость, а через шток 18 - в бесштоковую полость.
Исполнительный механизм 2 (фиг. 1) служит для выполнения технологических операций - зачистки заливов на отливке 43. Он состоит из зачистной головки 44 и корпуса 45 (фиг. 2). Зачистная головка 44 состоит из шлифовального круга 46, заключенного в кожухе 47 и закрепленного на валу 48, размещенном в опорном корпусе 49. Шкив 50 жестко закреплен на другом конце вала 48 и соединен клино- ременной передачей 51 со шкивом 52, закрепленным на двигателе 53. Зачистная головка .44 соединена с грузовой подвеской 4, на которой сидят грузы 54, с помощью натяжного каната 55 и отклоняющих роликов 56. На плите-маятнике 57 жестко закреплены зачистная головка 44 и двигатель 53. Плита-маятник 57 прикреплена в своей верхней части через подшипниковые опоры 58 к корпусу 45, состоящему из стоек 59 и связей 60, скрепленных с опорной плитой 61, которая жестко прикреплена к крышке 11. К корпусу 45 прикреплены дверки 6-9 (фиг. 1).
Компенсирующий механизм 3 служит для компенсации необходимой связи между шлифовальным крутом 46 и отливкой 43, т. е. служит для компенсации износа шлифовального круга. Компенсирующий механизм состоит из храпового колеса 62 (фиг. 1, 3, 5, 6), внутренний диаметр которого имеет резьбу 63; Г-образного винта 64, си- дящего в храповом колесе 62 и опирающегося на опоры 65, которые прикреплены к опорной раме 66, а последняя - к плите 61 корпуса 45. Ограничитель 67 (фиг. 2 и 6) предотвращает поворот Г0 образного винта 64 и жестко закреплен на плите-маятнике 57. Поворот храпового колеса 62 (фиг. 5 и 6) осуществляется собачкой 68 (фиг. 4), шарнирно закрепленной на оси 69 в вилке 70. Последняя ввернута в шток 71 пневмопружинно5 го цилиндра 72 (фиг. 5 и 6), жестко закрепленного к раме 66, состоящего из корпуса 73, поршня 74, пружины 75, штока 71. На вилке 70 закреплен регулировочный винт 76 (фиг. 4) и через ось
Q 69 закреплена направляющая 77 (фиг. 6), находящаяся в опоре 78 рамы 66.
Пневмосистема 5 (фиг. 3) состоит из устройства 79 подготовки воздуха, трубопроводов 80 и воздухораспределителя 81. Дверки 6-9 служат для лучшего обслужи5 вания исполнительного механизма 2, компенсирующего механизма 3 и пневмосистемы 5. Дверки шарнирно прикреплены к корпусу 45 с помощью петель 82. Электрооборудование 83 размещено на опорной плите 61 и на дверках 6-9. Штепсельные разъемы закреп0 лены в нижней части колонны 29 на фланце 84 (фиг. 1). Электрооборудование 83 служит для обеспечения циклического автоматического пуска и останова исполнительного механизма 2 и компенсирующего механизма 3.
Исходное положение механизмов робота. Рабочая среда - сжатый воздух - подведен к роботу, электросистема включена. Исполнительный механизм 2, компенсирующий механизм 3 находятся в крайнем
0 верхнем положении, т. е. сжатый воздух подведен в бесштоковую полость пневмоцилиндра 21 подъемного механизма 13. Поршень 74 (фиг. 5) находится в крайнем левом положении. Сжатый воздух подведен в штоковую полость пневмоцилиндра 16
5 (фиг. 1). Зачистная головка 44 находится в крайнем переднем положении. Груз 54 поджимает зачистную головку 44 вместе с плитой-маятником 57 к Г-образному винту 64. Устройство работает следующим образом. . Получив сигнал от конечного выключателя движущейся отливки на конвейере, включается двигйтель 53 (фиг. 1). Одновременно переключается воздухораспределитель 81 (фиг. 3) и сжатый воздух поступает через трубопровод 42 (фиг. 1) в што5 ковую полость пневмоцилиндра 21 подъемного механизма 13, который приводит исполнительный и компенсирующий механизмы в рабочее положение, т. е. опускает их.
Одновременно сжатый воздух поступает также в бесштоковую полость корпуса 73 и шток 71 с собачкой 68 с помощью храпового колеса 62 передвигает Г-образный винт 64 на величину износа шлифовального круга. Плита-маятник 57 с помощью каната 55, прикрепленного одним концом к грузу 54, через ролики 56 постоянно подтягивается к лапе Г-образного винта. Происходит процесс обработки заливов отливки. Отключение исполнительного 2 и компенсирующего 3 механизмов осуществляется от конечного выключателя, установленного на конвейере (не показан).
Установка конечных выключателей на начало обработки, на длину обрабатываемой поверхности и конец обработки обеспечивается по месту применения робота. После отключения электродвигателя 53 и одновременного переключения воздухораспределиподнять общую культуру труда в литейных цехах.
Формула изобретения
1.Робот преимущественно для зачистки заливов по наружному контуру отливок, содержащий корпус, подъемно-поворотное основание, на котором закреплена платформа, исполнительный механизм с плитой, силовые цилиндры и блок управления, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен компенсирующим механизмом, расположенным на платформе, а плита исполнитель15 ного механизма выполнена в виде маятника, шарнирно закрепленного в верхней части корпуса, и гравитационно связана с компенсирующим механизмом.
2.Робот по п. 1, отличающийся тем, что компенсирующий механизм представля10
теля 81 сжатый воздух поступает в бес- 20 ет С0бой корпус, на котором закреплен под
штоковую полость пневмоцилиндра 21 (фиг. 1). Шток 71 и поршень 74 пружиной 75 возвращаются в исходное положение. При этом робот занимает исходное
пружиненныи силовой цилиндр, храповое колесо и Г-образный винт, шток цилиндра шарнирно соединен с собачкой регулируемым винтом, а храповое колесо связано с Г-обположение. Далее робот ждет команду от 25 разным винтом разъемным соединением, отливки на следующий цикл обработки.- Робот может обрабатывать фасонную поверхность по линии разъема полуформ с перепадами по высоте. Предлагаемая конструкция робота позволяет расширить техноло- 30 Г-образного винта, он снабжен ограничите- гические возможности, используя его в качестве обрубщика, исключить ручной труд и
3. Робот по п. 2, отличающийся тем, что разъемное соединение выполнено резьбовым.
4 Робот по пп. 1 и 2, отличающийся тем, что, с целью исключения поворота
лем, установленным на плите исполнительного механизма.
поднять общую культуру труда в литейных цехах.
Формула изобретения
1.Робот преимущественно для зачистки заливов по наружному контуру отливок, содержащий корпус, подъемно-поворотное основание, на котором закреплена платформа, исполнительный механизм с плитой, силовые цилиндры и блок управления, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен компенсирующим механизмом, расположенным на платформе, а плита исполнитель5 ного механизма выполнена в виде маятника, шарнирно закрепленного в верхней части корпуса, и гравитационно связана с компенсирующим механизмом.
2.Робот по п. 1, отличающийся тем, что компенсирующий механизм представля0
0 ет С0бой корпус, на котором закреплен под
пружиненныи силовой цилиндр, храповое колесо и Г-образный винт, шток цилиндра шарнирно соединен с собачкой регулируемым винтом, а храповое колесо связано с Г-образным винтом разъемным соединением, - разным винтом разъемным соединением, - Г-образного винта, он снабжен ограничите-
3. Робот по п. 2, отличающийся тем, что разъемное соединение выполнено резьбовым.
4 Робот по пп. 1 и 2, отличающийся тем, что, с целью исключения поворота
Г-образного винта, он снабжен ограничите-
лем, установленным на плите исполнительного механизма.
45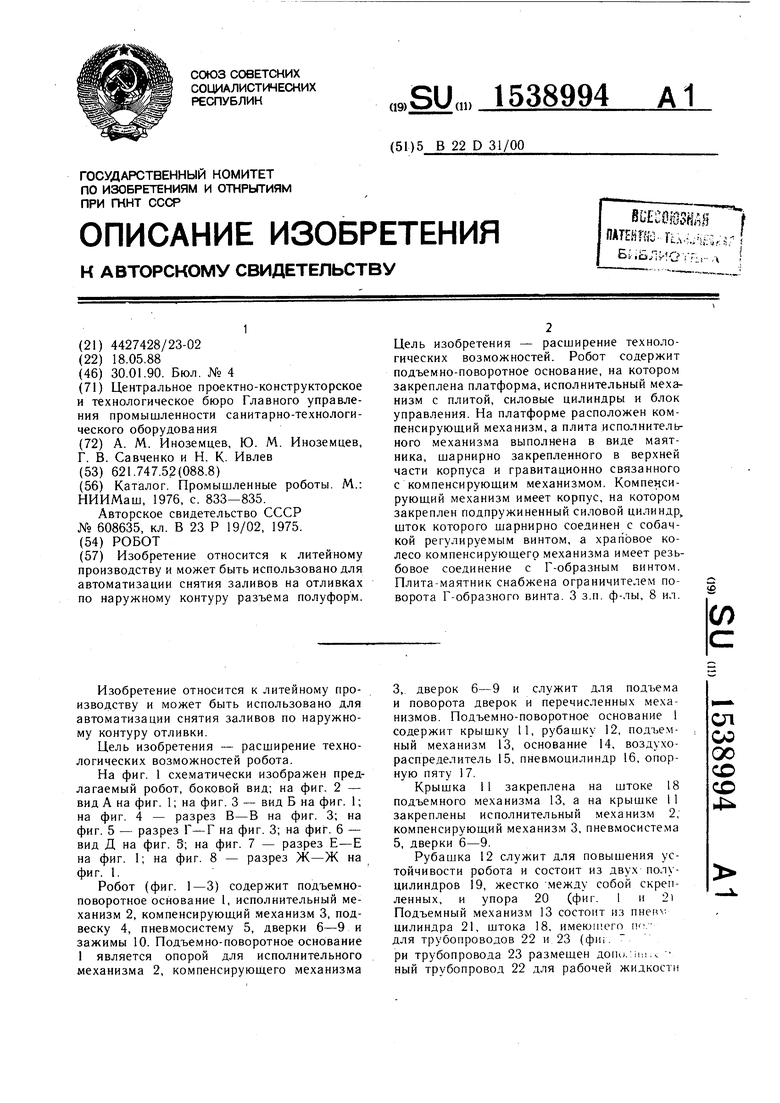


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения клея на кромки обувных деталей | 1988 |
|
SU1574202A1 |
| Дозатор для жидкости | 1979 |
|
SU851100A1 |
| Робот | 1984 |
|
SU1271628A1 |
| Выдвижной стол пресса | 1980 |
|
SU872304A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Пневматическая машина | 1990 |
|
SU1787758A1 |
| Машина ударного действия | 1989 |
|
SU1629173A1 |
| Устройство для загрузки плоских изделий, преимущественно выводных рамок интегральных схем | 1987 |
|
SU1499540A1 |
| Устройство для закрывания крышек люков железнодорожных полувагонов | 1985 |
|
SU1230896A1 |



Изобретение относится к литейному производству и может быть использовано для автоматизации снятия заливов на отливках по наружному контуру разъема полуформ. Цель изобретения - расширение технологических возможностей. Робот содержит подъемно-поворотное основание, на котором закреплена платформа, исполнительный механизм с плитой, силовые цилиндры и блок управления. На платформе расположен компенсирующий механизм, а плита исполнительного механизма выполнена в виде маятника, шарнирно закрепленного в верхней части корпуса и гравитационно связанного с компенсирующим механизмом. Компенсирующий механизм имеет корпус, на котором закреплен подпружиненный силовой цилиндр, шток которого шарнирно соединен с собачкой регулируемым винтом, а храповое колесо компенсирующего механизма имеет резьбовое соединение с Г-образным винтом. Плита-маятник снабжена ограничителем поворота Г-образного винта. 3 з.п. ф-лы, 8 ил.
24,25
Фиг.
91
ог
6h8h -
Ј-гпф
Ч
н
и
J
д дпа
fr668ЈS
85
00
со ю
о
Сз
в
Фиг.В
Фиг. 7
видд
67
№ - Ж
3
Фиг.8
| Каталог | |||
| Промышленные роботы | |||
| М.: НИИМаш, 1976, с | |||
| Счетчик для измерения расстояния, пройденного трамвайным вагоном под током или без тока | 1924 |
|
SU833A1 |
| Манипулятор | 1975 |
|
SU608635A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
