Изобретение относится к аналоговой вычислительной технике, а именно к управлению режимами работы энергосистем, и может быть использовано для непрерывного контроля располагаемой реактивной мощности явнополюсных синхронных генераторов и двигателей, включая мощные; и сверхмощные гидрогенераторы .
Цель изобретения - упрощение устройства .
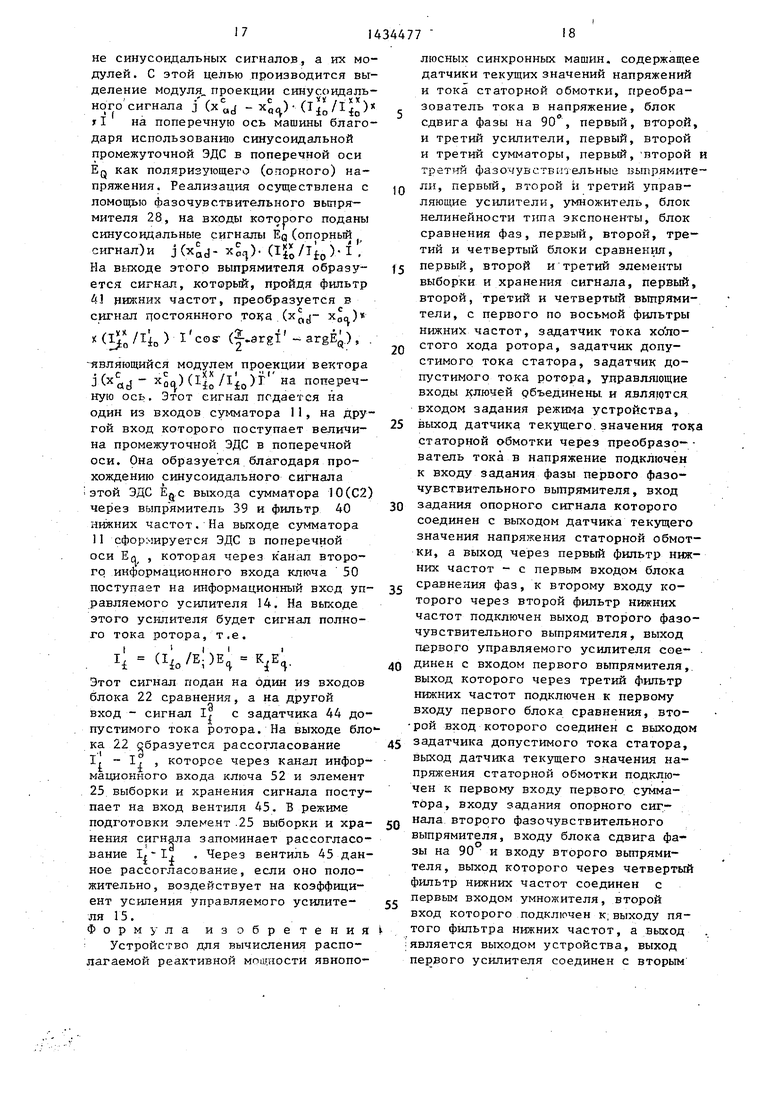
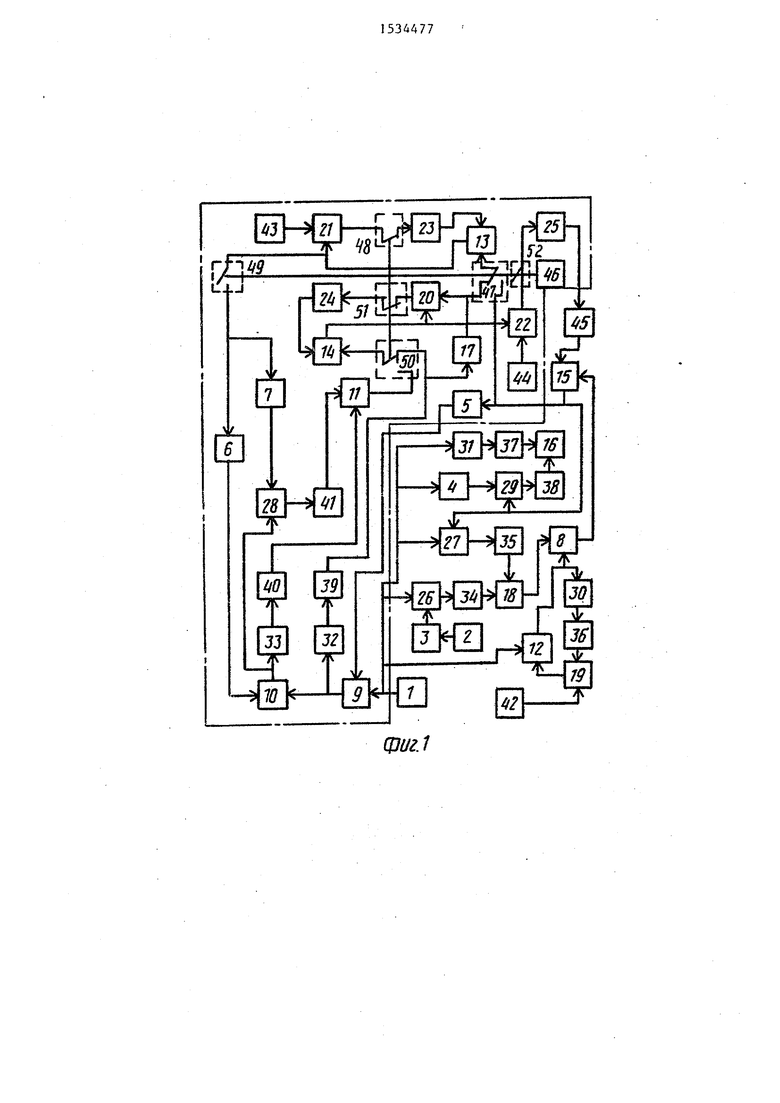
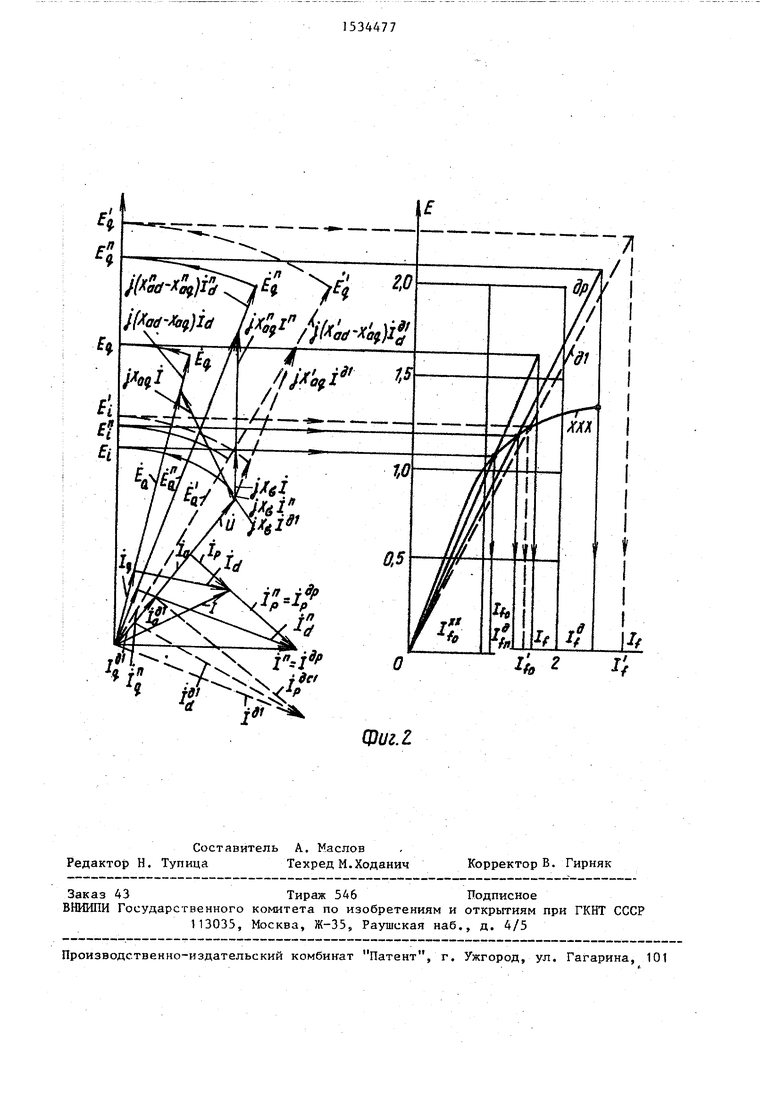
На фиг. I представлена блок-схема устройства} на фиг. 2 - векторные диаграммы формирования внутренней ЭДС, ЭДС в поперечной оси, характеристика холостого хода (XXX) и использование их для определения тока ротора.
Устройство (фиг.1) содержит датчик 1 текущего значения напряжения статорной обмотки, датчик 2 текущего значения тока статорной обмотки, преобразователь 3 тока в напряжение, ,блок 4 сдвига фазы на 90°, первый 5, второй 6 и третий 7 усилители, фаз.о.г. вый модулятор 8, первый 9, второй 10 и третий 11 сумматоры, первый 12, второй 13, третий 14 и четвертый, J5 управляемые усилители, умножитель 16, блок 17 нелинейности типа экспоненты, блок 18 сравнения фаз, первый 19, второй 20, третий 21 и четвертый 22 блоки сравнения, первый 23, второй 24 и третий 25 элементы выборки и хранения сигнала, первый 26,
Сп 00 4Ь 4Ь
ч|
второй 27, третий 28 и четвертый 29 фазочувствительные выпрямители, первый 30, второй 31, третий 32 и четвертый 33 выпрямители, с первого по восьмой фильтры 34-41 нижних частот, чадатчик 42 допустимого тока статора, задатчик 43 тока холостого хода ротора, задатчик 44 допустимого тока ротора, вентиль 45, пход 46 задания режима, с первого по шестой ключи 47-52.
Устройство работает следующим образом .
Формируется допустимая реактивная составляющая тока машины для непрерывно изменяющегося режима работы по активной составляющей тока и напряжению статорной обмотки, исходя из полного допустимого тока статора в этом режиме. Последний ток использован для моделирования тока в роторе, который сравнивается с допустимым током ротора. Если ток в роторе
10
текущего тока статора. Тогда величина реактивной составляющей I оказывается равной допустимой величн е 4С-Эс
Так как величина 1„ окончательно
может быть принята после моделирования тока If в роторе машины, и если сопоставление его при этом с допустимой величиной I. дает результат I, Ј- I. , то полученные полный ток статора I и его реактивную составляющую
I
следует считать как про15
межуточные и обозначать их с дополнительным верхним индексом /, т.е.9 и 1Э„С .
Полученный вектор полного тока статора I или в общем случае I используют совместно г характеристикой 20 холостого хода (XXX) машичн, т.;5. зависимостью напряжения статорной обмотки на холостом ходу от тока ротора Ii или вну.-оенией ЭДС от тока намагничивания машины 1{с, прн- не превышает допустимый, то сформиро- 25 уеденного к цепи ротсра. Первое позванный допустимый, реактивный ток по воляет при измеренном текущем напря
текущего тока статора. Тогда величина реактивной составляющей I оказывается равной допустимой величн е 4С-Эс
Так как величина 1„ окончательно
может быть принята после моделирования тока If в роторе машины, и если сопоставление его при этом с допустимой величиной I. дает результат I, Ј- I. , то полученные полный ток статора I и его реактивную составляющую
I
следует считать как про15
межуточные и обозначать их с дополнительным верхним индексом /, т.е.9 и 1Э„С .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381648A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1985 |
|
SU1458880A1 |
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381649A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2013 |
|
RU2539347C1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано для непрерывного контроля располагаемой реактивной мощности явнополюсных синхронных генераторов и двигателей. Целью изобретения является упрощение устройства. Цель достигается тем, что устройство содержит датчик текущего значения напряжения статорной обмотки, датчик текущего значения ток статорной обмотки, преобразователь тока в напряжение, блок сдвига фазы на 90°, усилитель, фазовый модулятор, сумматоры, управляемые усилители, умножитель, блок нелинейности типа экспоненты, блок сравнения фаз, блоки сравнения, элементы выборки и хранения сигнала, фазочувствительные выпрямители, фильтры нижних частот, выпрямители, датчик допустимого тока статора, задатчик тела холостого хода ротора, задатчик допустимого тока ротора, вентиль и ключи. 2 ил.
условию допустимого тока статора принимается за располагаемый реактивный ток. Если ток в роторе превышает допустимый, то вырабатывается воздействие, уменьшающее величину полного тока статора и весь описанный процге повторяется до тех пор, пока моделируемый ток ротора не сравняется с ло пустимой величиной. Полученная при этом реактивная составляющая тока машины по-прежнему обусловлена текущими активным током и напряжением статора, однако исходит не из полнот допустимого тока статора, а полного тока статора со сниженной величиной из условия допустимого тока ротора. Поэтому она принимается за допустимый реактивный ток по условию допустимого тока ротора или располагаемый реактивный ток машины.
Формирование допустимого реактивного тока I р° по условию допустимого тока статора I осуществляется так: фактический (текущий) полный ток статора I разлагают на активную IQ (совпадающую по фазе с текущим напряжением U статора) и реактивную 1р составляющиие, формируют полный допустимый синусоидальный ток статора I и его ортогональные составляющие Т и I,
так, чтобы величина
VI
активной составляющей 1д была равна величине активной составляющей I/
жении U статора и заданных параметрах машины с помощью активного сопротивления га л индуктивного сопротивления рас«- М1ия x,j статорной обмотки, сопротивлений взаимоиндукции н продольной xaj и поперечной ха„ осях получить внутреннюю ЭДС
U +(га + jxg)i
промежуточную ЭДС в поперечной оси, т.е. ЭДС за реактансом в поперечной
оси
i
EQ U +
ra + j(x6 +x )
5
Е, +
ЭДС в поперечной оси, т.е. ЭДС за реактансом в продольной оси
0
Ч+ j - Ё,
F
U +
гв + j(x6 + х ) I
( т
JXao1
°1 + 3 (х„, х
+ 3 Х««Г
) I
(„ vaj- d где Ij - ортогональная составляющая полного тока статора в продольной оси.
5 Второй позволяет по величине внутренней ЭДС Е - с помощью XXX найти ток
1Ti
намагничивания машины Ъ , приведенный к цепи ротора, который определяет намагниченность магнитной системы машины в данном режиме, и тем самым учесть изменение сопротивлений взаимоиндукции хаЈ, ,xacj вследствие нелинейности XXX, т.е. насыщения магнитной системы, а также благодаря взаимосвязям
i i
и
ii i
- Ki4
де
К
4JЈo
ток ротора , соответствующий току намагничивания
ть:
коэффициент, учитывающий
нелинейности
определить ток ротора
довательности: по Е ,
го ве ггчине Ег
Полуннпый ток Di 1-ора вают
1
с величиной допустимого тока рО| S
торл I.. Если I, IV, то сформированный ранее допустимый реактивный ток 1рС по условие допустимого тока статора принимают за окончательный
-г ОС
I р или рас,полагаемык реактивный.
ПтЭсТЙС| г-т -г О
ток 1р 1р Тр. Ьслч Т± Jf, то уменычлется ;зелм гина полного тока статора Т . D ro приводит также к изменению фазы т,а Т по сравнетто с зон Г , ;гк к/к формирование I осуществляется, исходя из
Исполь ованне ноi
статора Т приреактивной составляющей I
Tl
моделированию меньшей i
величины тока ротора I . Если достигается равенство If i.r , то прекращается уменьшение вепнчины полного тока статора. Рзактявная соет1
тавляющая Тр , соответствующая этим условиям.яппяется допустимой реак- т з::оГт сост твляюгцей тока машины по
у Лившо до метимого тока ротора If, -i ;jp
L D
тока ротора
т.е. I. чли располагаемым реJ т т тЭр
актислз м гоком машины In In - Тр.
I, ,
Использование описанного способа
позволяет гфи моделировании допустимого реактивного тока по условию допустимого тока ротора в полном объеме учесть нелинейность XXX. Благодаря тому, что для формирования допустимого ггиюго тока по условию допустимого тока статора используется разложение вектора допустимого тока статора :i i т oKvr.r/io активную
0
5
0
допустимую реактивную составляющие, процесс отработки располагаемого реактивного тока упрощается, Taic, если сравнение тока в роторе с допустимой
величиной дало результат ,«; 1Ј ,то
0
Т3
-1 - Ji процесс отработки завершается без
каких бы то ни было дозировок. Если результат сравнения противоположный, то процесс or расе гк;: выпомшется я одном направлении, а именно в ча;. лении уменьшения величины ксктора полного тока статора I и моделируемого тока ротора It .
На фиг. 2 даны векторные диаграммы формирования внутренней ЭДС Е , промежуточной ЭДС R поперечной оси EQ и ЭДС в поперечной оси Ц, характеристика холостого хода XXX,. использование ее для определения тока намагничивания I/ по внутренней ЭДС, построение нагрузочных характеристик (прямые, проходящие через начало координат на графике XXX), применение последних для нахождения тока ротора 1{ по ЭДС Е, . Диаграм- мы даны при одном и том же фазном напряжении для текущего режима машины, электрические величины которого имеют указанные обозначения, а нагрузочная характеристика не обозначена для условий формирования допустимого реактивного тока I рС| по условию допустимого тока статора, однако g не соответствующего располагаемому
реактивному току по условию допусти-
3 р
мого тока ротора „ и поэтому имеющего в обозначениях электрическ гх величин дополнительный верхний ип- 0 деке включая нагрузочную характеристику, а графические построения выполнены штриховыми линиямиЈ для условий коррекции допустггмого
5
реактивного тока iJ ,
исходя из дое пустимого тока ротора I,, который
о. х 3 л
оказался меньше II Поэтому I принят в качестве располагаемого реактивного тока Jp и в обозначениях электрических величин, включая па0 грузочную характеристику, использованы индексы др и пг. Линиями со стрелками на фиг. 2 обозначены век- торно-синусоидальные величины. Кроме того, стрелки указывают направg ление и последовательность графических построений для определения тока намагничивания и полного тока ротора.
Согласно построениям на фиг.2, ток намагничивания находится по ве- .
личине внутренней ЭДС.ТочкиО, ,F-),
(Ifo Е;. T1F) нэ ХХХ а- рактериэуют состояние магнитной системы м.яшины соответственно в текущем режиме в условиях моделирования допустимого реактивного тока по допустимому току статора и в условиях коррекции допустимого реактивного тока по допустимому току ротора. Че- рез эти точки проходят соответствующие нагрузочные характеристики: без обозначения 3,идр. Их наклон определяет степень насыщения магнитопро- вода и, следовательно, изменение индуктивных сопротивлений взаимоиндукции в продольной XQг х I - XG и поперечной ха„ х„ - х(осях,
где х.
и xfl
- синхронные реэктансы в продольной и поперечной осях
машины.
Чем меньше наклон, тем меньше эти сопротивления. Величины их с учетом насыщения целесообразно определять через сопротивления взаимоиндукции xad и х соответствующие некоторому базовому режиму, характеризуемому нагрузочной характеристикой, проходящей через точку XXX (I/0 IЈQ Е; Ь v ) , определяемую током на- магничпвания на холостом ходу иипги- ны и внутренней ЭДС, равной номинальному напряжению Dн . Согласно фиг. 2 это можно выполнить по Форм/- лам :
ill
ad
lod ij
fo «X io
V - V ...
H n Ijc
По величине сопротивления взаимоиндукции в поперечной оси хд- и ток статора I определяют падение напряI-I I
Е0 JxQftI + Е. ,
JQ
a
жения на этом сопротивлении , которое суммируют с внутренней ЭДС Е- .В результате получают промежуточную ЭДС в поперечной оси EQ.
которую используют как опорный сигнал для разложения полного тока статора I на ортогональные синусоидальные составляющие, совпадающие соответственно с направлением промежуточной ЭДС EQ в поперечной оси In (составляющая в поперечной оси) и направлением, перпендикулярным к ней .Ij (составляющая в продольной оси).
Для трех случаев, представленчых на фиг.2, указанные составляющие обозначены соответственно:IQ
тЭ. уЭ .
щий режим, I
Ij - текуусловия A мирования допустимого реактивного
токаjпо допустимому току статора, In, Ij -условия коррекции допустимого реактивного тока по допустимому току ротора. Далее находят падв7, ние напряжения от протекания тока Ij по индуктивному сопротивлению, являющемуся разностью реактансов в продольной и поперечной о.ях: х i - х„
xU)Tio/Tfo T eJ xad IЈo/Iio и суммируют вектором промежуточной ДС в поперечной оси EQ .В результате получает ЭДС в поперечной ос;: Ед
поперечной оси
Е
EQ + (xad Между величиной ЭДС Ел и полным токе, ротора Ij. имеет место нелинейная зависимость
- Kt li f4PV
которую целесообразно использовать для определения через нагрузочные характеристики ( и:г.2). Эта возможно обусловлю.la очевидным соотношением, следующим из построений Фиг . 2
5 0
5
Г{
J
К,
i
Е,
Г -±±. с у
LI°E; в; N
Данное соотношение, также как и остальные, отражены в операциях описанного способа, который осуществляется в последовательности.
Формируют исходный синусоидальный сигнал, равный по величине допустимому току обмотки статора 1 и имеющий определенную начапьну фазу. Фазу этого тока изменяют, исходя из сравнения величины его активной составляющей с активной составляющей текущего фактического тока статора. Это обеспе0
5
чивает моделирование полного тока ста1 IЯ
тора I , который имеет величину I и фазу, обусловленную равенством его активной составляющей и активной сос- та,вляющей фактического тока статора машины, т.е. I coscf I cosif I coscf , причем cf1 - фаза моделируемого тока статора относительно фазного напряжения Ь, а if- фаза фактического тока L рабочего режима относительно того же напряжения.
Синусоидальный ток I используют для получения внутренней ЭДС F; , ЭДС
поперечной оси Е, тока намагничивания I и полного тока ротора I, . Последний сравнивают с допустимым током ротора If и, если I, d TЈ , то реактивная составляющая тока I1 1 является искомым располагаемым реактивным током, который определен по условию допустимого тока статора,т.е.
п Зс, Зс I n 1П с I,
э. э
Isintp ,
0
если условием окончания регулирова- ния является допустимый ток статора, или непревышение током ротора LJ. допустимой величины I.j , когда I I P и СРП if Р , если условием окончания регулирования является др- пустимый ток ротора, т.е. I/ I, . Для получения синусоидального сигнала, величина которого равна допусти9
Если при сравнении окажется Ij I
Р Р Р
3
4 т.е. моделируемый полный ток ротора
превышает допустимую величину, то npo-j 36. На информационный вход усилителя
12 подано фазное напряжение U с вымому току статора 1°, предусмотрен контур регулирования, состоящий из управляемого усилителя 12, блока 19 сравнения, выпрямителя 30 и фильтра
изводят снижение величины полного тока статора I против величины I . Это приводит-к необходимости изменить фазу I I так, чтобы равенство I costf Icos q вновь имело место. Снижение величины тока I , а следовательно, и подстройку фазы if ведут до тех пор, пока не будет достигнуто выравнивание полного тока ротора
3
хода датчика 1 текущего напряжения.
20
I
и допустимого тока
Реактив- 25
г in У 1- 1 тми и l it
ная составляющая полного тока статора I Р при этом является располагаемым реактивным током 1„ 1„, который определен по условию допустимого тока ротора, т.е.
тп ТР Л Р
- I9 sintP9p
где (о Р- фаза, к которой стремится
регулируемая фаза в процессе ее многократной подстройки при снижении величины I .
На фиг. 1 показаны структурные и функциональные связи устройства, реализующего описанный способ.
Определяющими в схеме (фиг.1) являются узлы для получения полного синусоидального тока статора I1 , который формируется регулировкой фазы и величины синусоидального сигнала, имеющего неготорую начальную фазу, и начальную величину, равную допустимому току статора I , исходя из условия того, чтобы при разложении отрегулированного синусоидального сигнала п
I величина его активной составляющей J I cos( I0C I COSCJT ij5 Ipcos(|3P была равна величине актирной составляющей фактического тока статора, т.е. Ia Icostj , a величина реактивной составляющей - величине располагаемого реактивного тока if InsintPn ljc (fa «iJLfiny 1 т тЭ и tf3,
Выходной сигнал усилителя 2 U проходит выпрямитель 30 и фильтр 36 и преобразуется в сигнал постоянного тока U. Последний поступает на один из входов блока 19 сравнения, на другой вход которого подан с за- датчика 42 допустимого тока статора неизменный сигнал постоянного тока Is. На выходе блока 19 образуется . рассогласование U-I , которое подается на вход задания коэффициента усиления управляемого усилителя 12, 30 изменяя его коэффициент усиления. , Благодаря этому рассогласование U - -1° снижается и в пределе стремится
к нулю. При этом и I3. Следовательно, независимо от величины фаз;- ного напряжения U на выхрде управля,емого усилителя 12 будет синусоидальный сигнал U , величина которого всегда равна I , т.е. U I9.
Сигнал I9 подается на информаци40 онный вход фазового модулятора 8. На вход задания сдвига фаз этого модулятора поступает сигнал с выхода блока 18 сравнения фаз. Благодаря этому .фаза сигнала на выходе фазового мо45 дулятора 8 меняется. Этот сигнал поступает на информационный вход управляемого усилителя 15, на выходе которого имеет место синусоидальный сигнал с той же фазой, но может быть
35
50
55
изменен по величине за ечет рассогласования 1 - I,, поданного на вход задания коэффициента усиления этого усилителя и изменяющего его коэффициент передачи. Выходной синусоидальный сигнал управляемого усилителя 15 является полным током статора i i . i i
I , соответствующим величине I sintp
моделируемого реактивного тока.Чтобы этот ток достиг величины и фазы,
если условием окончания регулирова- ния является допустимый ток статора, или непревышение током ротора LJ. допустимой величины I.j , когда I I P и СРП if Р , если условием окончания регулирования является др- пустимый ток ротора, т.е. I/ I, . . Для получения синусоидального сигнала, величина которого равна допусти9
мому току статора 1°, предусмотрен контур регулирования, состоящий из управляемого усилителя 12, блока 19 сравнения, выпрямителя 30 и фильтра
хода датчика 1 текущего напряжения.
0
5
Выходной сигнал усилителя 2 U проходит выпрямитель 30 и фильтр 36 и преобразуется в сигнал постоянного тока U. Последний поступает на один из входов блока 19 сравнения, на другой вход которого подан с за- датчика 42 допустимого тока статора неизменный сигнал постоянного тока Is. На выходе блока 19 образуется . рассогласование U-I , которое подается на вход задания коэффициента усиления управляемого усилителя 12, 0 изменяя его коэффициент усиления. , Благодаря этому рассогласование U - -1° снижается и в пределе стремится
к нулю. При этом и I3. Следовательно, независимо от величины фаз;- ного напряжения U на выхрде управля,, емого усилителя 12 будет синусоидальный сигнал U , величина которого всегда равна I , т.е. U I9.
Сигнал I9 подается на информаци0 онный вход фазового модулятора 8. На вход задания сдвига фаз этого модулятора поступает сигнал с выхода блока 18 сравнения фаз. Благодаря этому .фаза сигнала на выходе фазового мо5 дулятора 8 меняется. Этот сигнал поступает на информационный вход управляемого усилителя 15, на выходе которого имеет место синусоидальный сигнал с той же фазой, но может быть
5
изменен по величине за ечет рассогласования 1 - I,, поданного на вход задания коэффициента усиления этого усилителя и изменяющего его коэффициент передачи. Выходной синусоидальный сигнал управляемого усилителя 15 является полным током статора i i . i i
I , соответствующим величине I sintp
моделируемого реактивного тока.Чтобы этот ток достиг величины и фазы,
соответствующих величине располэга п ,Эс емого реактивного тока I Тр
I sin If по условию допустимого тока статора, действует контур ре- гулирования его фазы If , исходя из условия if If . Этот контур выполнен на основе блока 18 сравнения фаз и фазового модулятора 8. Чтобы ток I достиг величины и фазы, COOT- ветствующих величине располагаемого л
т П тЗр тОР „.
реактивного тока I. 1-г I.Rinty по условию допустимого тока ротора, совместно работают два контура регулирования: указанный контур,гкото- рый отрабатывает фазу тока I , исходя из условия tf (f f , и другой контур на основе обобщенного формирователя рассогласования Ij - I. полного тока ротора относительно до- пустимой величины (обведен на фиг.1 штрихпунктирной линией) и управляемого усилителя 15, отслеживающего
величину I .исходя из условия riтЗр . j9p .
I j P, где I°r величина тока ста-
тора
iV,
соответствующая допустимому току ротора It .
Режим работы контуров регулирования обеспечен за счет вентиля 45.Вентиль 45 закрыт при рассогласовании 1 - I, 0, благодаря чему работает только контур на основе блоков 18 и фазового модулятора 8. Наоборот, при ll - I 0, вентиль 45 открыт и наряду с упомянутым контуром деист- вует контур на основе обобщенного формирователя, вырабатывающего рассогласование It - I,, и управляемого усилителя 15. Другими словами, открытый вентиль 45 в этом случае про- пускает положительное рассогласова Э
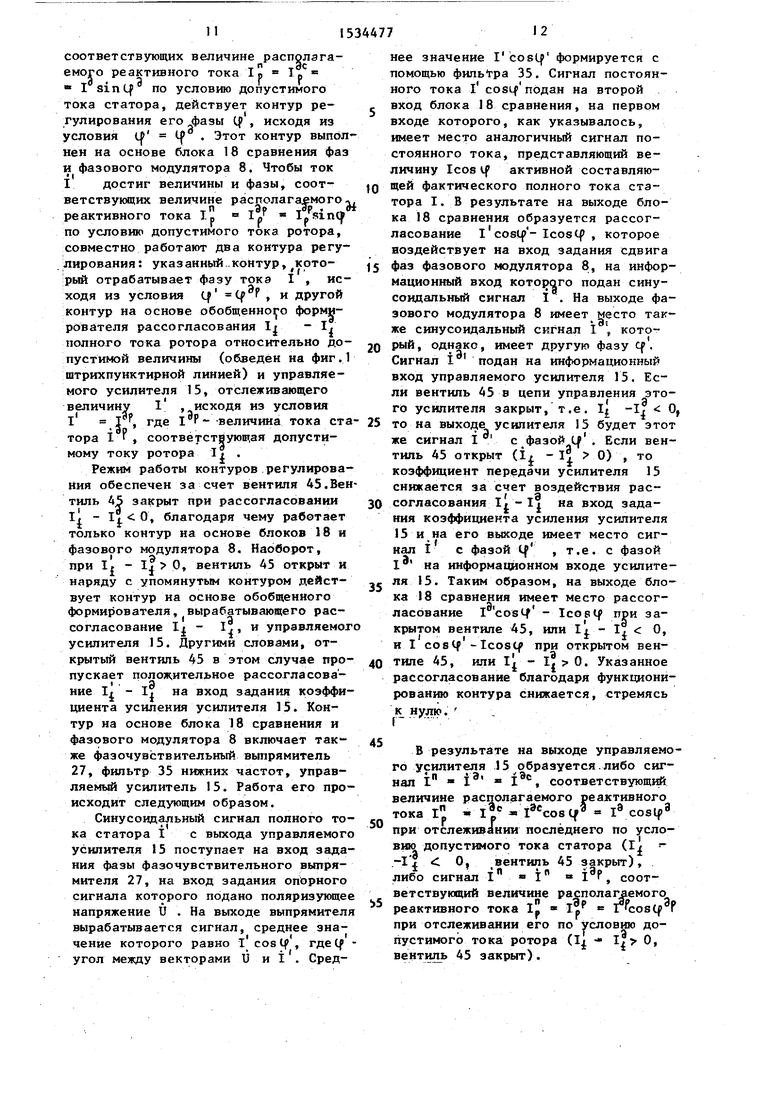
ние I, - I на вход задания коэффициента усиления усилителя 15. Контур на основе блока 18 сравнения и фазового модулятора 8 включает так- же фаэочувствительный выпрямитель 27, фильтр 35 нижних частот, управляемый усилитель 15. Работа его происходит следующим образом.
Синусоидальный сигнал полного то- ка статора I с выхода управляемого усилителя 15 поступает на вход задания фазы фазочувствительного выпрямителя 27, на вход задания опорного сигнала которого подано поляризующее напряжение U . На выходе выпрямителя вырабатывается сигнал, среднее значение которого равно l cos If , rn.e(f - угол между векторами U и I . Сред
нее значение I1 cosLf формируется с помощью фильтра 35. Сигнал постоянного тока I1 costf подан на второй вход блока 18 сравнения, на первом входе которого, как указывалось, имеет место аналогичный сигнал постоянного тока, представляющий величину Icos if активной составляющей фактического полного тока статора I. В результате на выходе блока 18 сравнения образуется рассогласование I coslf - Icostf , которое воздействует на вход задания сдвига фаз фазового модулятора 8, на информационный вход которого подан синусоидальный сигнал I . На выходе фазового модулятора 8 имеет место также синусоидальный сигнал I , который, однако, имеет другую фазу tf , Сигнал 1 подан на информационный вход управляемого усилителя 15. Если вентиль 45 в цепи управления этого усилителя закрыт, т.е. 1 -I, О, то на выходе усилителя 15 будет этот же сигнал I тиль 45 открыт
коэффициент передачи усилителя 15 снижается за счет воздействия рассогласования I, - I, на вход задания коэффициента усиления усилителя
с фазой If . Если вен- (it - I 0) , то
15 и на его выходе имеет место сигнал I с фазой tf , т.е. с фазой на информационном входе усилителя 15. Таким образом, на выходе блока 18 сравнения имеет место рассогласование I cosif - Icoplf при закрытом вентиле 45, или 1 - I О, и I со в if -Icostf при открытом вентиле 45, или l i - I. 0. Указанное рассогласование благодаря функционированию контура снижается, стремясь к нулю.
В результате на выходе управляемого усилителя 15 образуется.либо сигнал 1П 1Э 1Эс, соответствующий величине располагаемого реактивного тока I - 1рс - I cco8tf3 - I9 cosif3 при отслеживании последнего по условию допустимого тока статора (I -1 х «С 0, вентиль 45 закрыт), либо сигнал I in iP, соответствующий величине располагаемого реактивного тока I. if « i McosCf P при отслеживании его по условию доI Э
пустимого тока ротора (Ii - 1 О, вентиль 45 закрыт).
1 3
Контур на основе обобщенного формирователя рассогласования 1 - Т, (обведен штрихпунктиром на фиг.1) и управляемого усилителя 15 содержит также вентиль 45, назначение которого подключить выработанное рассогласование 1 - I, на вход задания коэффициента усиления усилителя 15, ее ли If, - It О, и разорвать эту цепь
при IL I с0 ри ОТКРЫТОМ вентиле 45 (I) - I3, у 0) контур действует, обеспечивая снижение рассогласования
Iiнулю. (I{-l| «: 0)
При
LJ , устремляя его к закрытом вентиле 45 контур не действует.
Полученный на выходе управляемого усилителя 15 синусоидальный сигнал I I с I , являющийся полным током статорной обмотки по условию допустимого тока статора (1± - Т, сО) или I Т I Р , являющийся - полным током статорной обмотки по условию допустимого тока ротора (Т«- -I, 0), подается на вход задания фазы фаэочувствительного выпрямителя 29, на вход задания опорного сигнала которого подано поляризующее напряжение -JU с выхода блока 4 сдвига фаз, т.е. фазное напряжение, сдви - нутое на 90° в сторону отставания. В результате на выходе выпрямителя 29 образуется сигнал, среднее значение ко
т ТР
Для функционирования контура от работки отношения I /Ij0 формиру ся внутренняя ЭДС: на вход усилите 5 поступает моделируемый синусоида
оторого Јосле фильт а Забудет: „ полный ток статорной обмотки I
Р . С О S . COSCfПРИ«jo nt-IV-ЬПА «Э МГЪГ«П ЧГ /t1.irri.vrn Пв /чК ЧП«11ГАЧ
COSCP Т3
xf
cosq
Та с08Ц 9Р
Ii -It 0 и I при 1 -lj. 0. Этот сигнал, пройдя фильтр 38, преобразуется в сигнал постоянного тока и подается на один из входов умножителя 16. На другой вход этого умножителя 16 подан сигнал постоянного тока, равный величине текущего напряжения U, который формируется из текущего статора U с помощью выпрямителя 31 и фильтра 37 нитгнкх частот. В результате на выходе умножителя 16 образуется сигнал располагаемой реактивной мощности п
40
на выходе этого усилителя образует сигнал (ra +jx&)I , который, сумм руясь с фазным напряжением U на су маторе 9, на его выходе дает внутреннюю ЭДС
;
и -Кга + jyff)i.
Синусоидальный сигнал внутренней 45 ЭДС, пройдя через выпрямитель 32 и фильтр 39 нижних частот, преобразуется в сигнал постоянного тока Е;
Qn
иа
рso
подаваемый на вход блока 17 нелинейности. На выходе блока J7 нелинейности типа экспоненты, аппроксим рующего XXX машины, образуется сигнал тока намагничивания . Послед ний через канал второго информацион ного входа ключа 47 поступает на ин формационный вход управляемого усилителя 13, а сигнал с его выхода I. подан на один из входов блока 21 сравнения. На другой вход блока .21 (сравнения поступает сигнал с задат-
Рассмотрим работу обобщенного форТЭ
мирователя рассогласования
Ч
ТЭ
который вместе с управляемым усилителем 15 и вентилем 45 образует обобщенный контур коррекции располагаемого реактивного тока по условию допустимого тока ротора, т.е In I .Р
34477|4
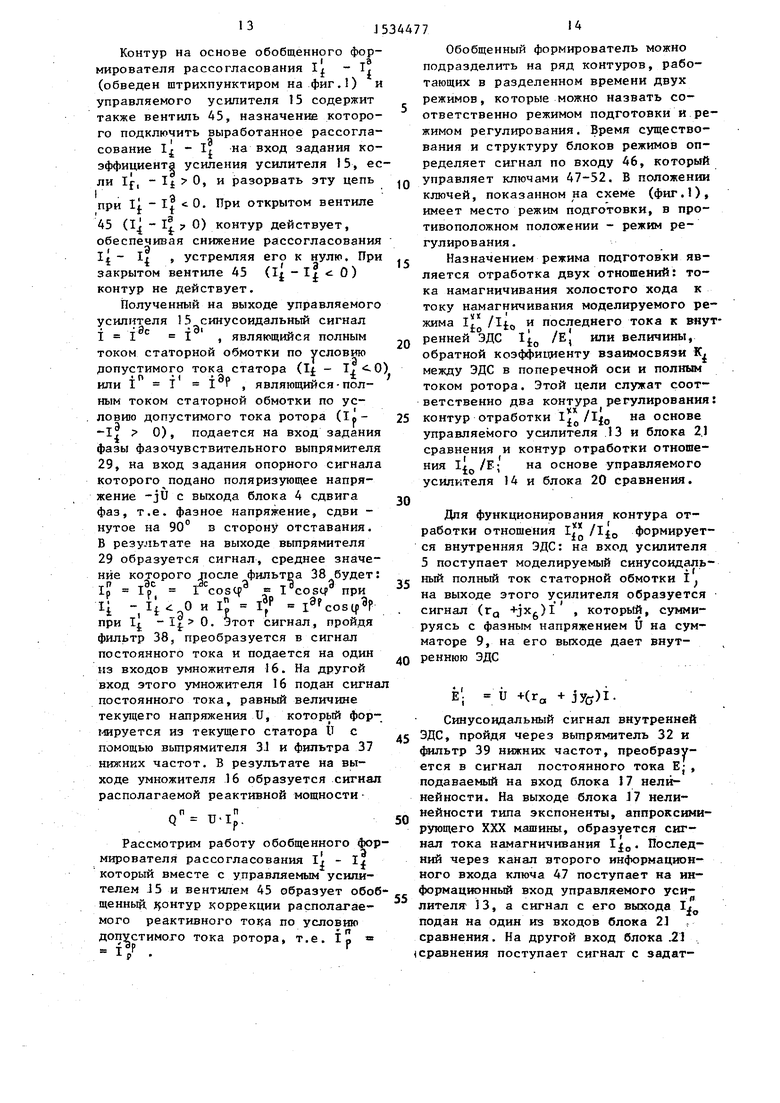
Обобщенный формирователь можно подразделить на ряд контуров, работающих в разделенном времени двух режимов, которые можно назвать соответственно режимом подготовки и режимом регулирования. Время существования и структуру блоков режимов определяет сигнал по входу 46, который управляет ключами 47-52. В положении ключей, показанном на схеме (фиг.1), имеет место режим подготовки, в противоположном положении - режим регулирования .
Назначением режима подготовки является отработка двух отношений: тока намагничивания холостого хода к
10
15
току намагничивания моделируемого режима l /It0 и последнего тока к внутренней ЭДС /Е| или величины, обратной коэффициенту взаимосвязи К между ЭДС в поперечной оси и полным током ротора. Этой цели служат соответственно два контура регулирования:
контур отработки 1 на основе управляемого усилителя 13 и блока 2.1 сравнения и контур отработки отношения ll /F; на основе управляемого усилителя 14 и блока 20 сравнения.
30
Для функционирования контура отработки отношения I /Ij0 формируется внутренняя ЭДС: на вход усилителя 5 поступает моделируемый синусоидаль„ полный ток статорной обмотки I
«jo nt-IV-ЬПА «Э МГЪГ«П ЧГ /t1.irri.vrn Пв /чК ЧП«11ГАЧ
на выходе этого усилителя образуется сигнал (ra +jx&)I , который, суммируясь с фазным напряжением U на сумматоре 9, на его выходе дает внутреннюю ЭДС
;
и -Кга + jyff)i.
Синусоидальный сигнал внутренней 45 ЭДС, пройдя через выпрямитель 32 и фильтр 39 нижних частот, преобразуется в сигнал постоянного тока Е;,
so
55
подаваемый на вход блока 17 нелинейности. На выходе блока J7 нелинейности типа экспоненты, аппроксимирующего XXX машины, образуется сигнал тока намагничивания . Последний через канал второго информационного входа ключа 47 поступает на информационный вход управляемого усилителя 13, а сигнал с его выхода I. подан на один из входов блока 21 сравнения. На другой вход блока .21 (сравнения поступает сигнал с задат-
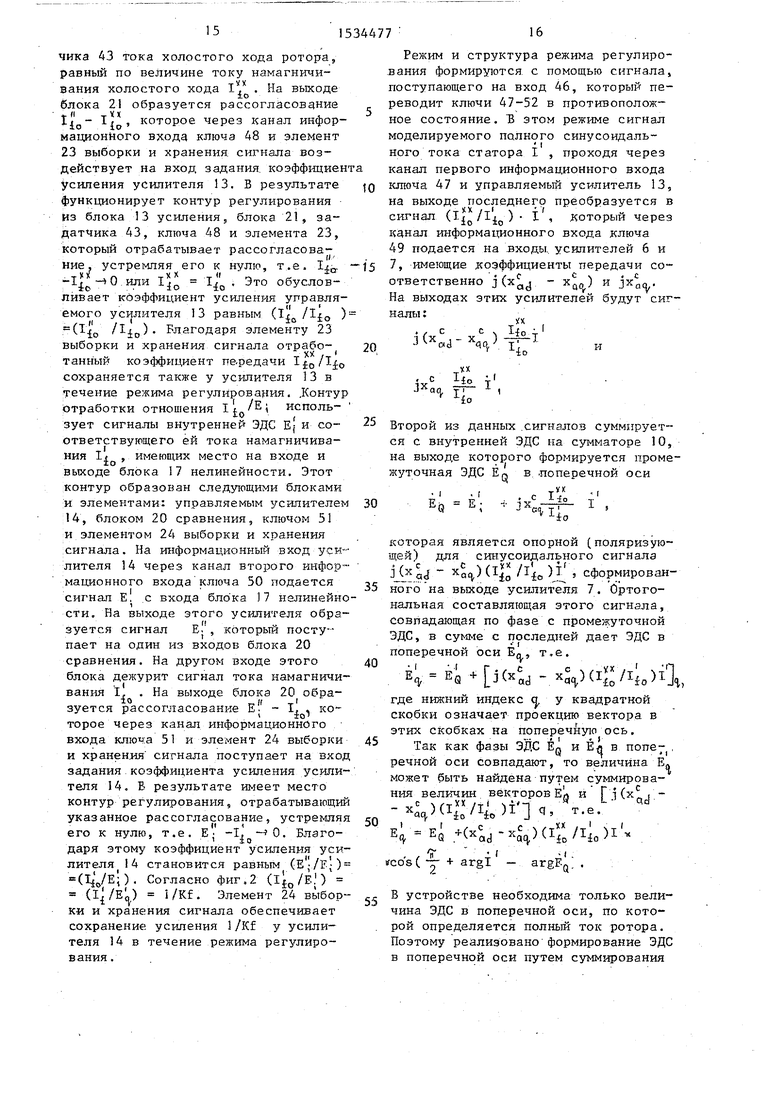
чика 43 тока холостого хода ротора, равный по величине току намагничивания холостого хода 1 На выходе блока 21 образуется рассогласование l| 0- ijp, которое через канал информационного входа ключа 48 и элемент 23 выборки и хранения сигнала воздействует на вход задания коэффициент усиления усилителя 13. В результате функционирует контур регулирования из блока 13 усиления, блока 21, за- датчика 43, ключа 48 и элемента 23, который отрабатывает рассогласование, устремляя его к нулю, т.е. 1/„
у JV X(
-It или 1|0 . Это обусловливает коэффициент усиления управляемого усилителя 13 равным (I, /If0 ) (IЈD /lЈ0). Благодаря элементу 23 выборки и хранения сигнала отрабо- тайный коэффициент пе.редачи If.0/lЈ0 сохраняется также у усилителя 13 в течение режима регулирования. .Контур отработки отношения Ij;0 использует сигналы внутренней ЭДС EJ и со- ответствующего ей тока намагничивания I , имеюашх место на входе и выходе блока 17 нелинейности. Этот контур образован следующими блоками и элементами: управляемым усилителем 14, блоком 20 сравнения, ключом 51 и элементом 24 выборки и хранения сигнала. На информационный вход усилителя 14 через канал второго информационного входа ключа 50 подается сигнал Е, с входа блока 17 нелинейности. На выходе этого усилителя образуется сигнал Е. , который поступает на один из входов блока 20 сравнения. На другом входе этого блока дежурит сигнал тока намагничивания I, . На выходе блока 20 образуется рассогласование - I, , которое через канал информационного входа ключа 51 и элемент 24 выборки и хранения сигнала поступает на вход задания коэффициента усиления усилителя 14. В результате имеет место контур регулирования, отрабатывающий указанное рассогласование, устремляя его к нулю, т.е. Е -I. - 0. Благо1 IО
даря этому коэффициент усиления усилителя 14 становится равным (E-/F;) -(). Согласно фиг. 2 () () i/Kf. Элемент 24 выбор- ки и хранения сигнала обеспечивает сохранение усиления 1/Kf у усилителя 14 в течение режима регулирования .
Режим и структура режима регулирования формируются с помощью сигнала, поступающего на вход 46, который переводит ключи 47-52 в противоположное состояние. Б этом режиме сигнал моделируемого полного синусоидапъ- ного тока статора I , проходя через канал первого информационного входа ключа 47 и управляемый усилитель 13, на выходе последнего преобразуется в сигнал (T o/Iio) I , который через ка,нал информационного входа ключа 49 подается на входы усилителей 6 и 7, имеющие коэффициенты передачи соответственно j(x - X G(V) и jxcav На выходах этих усилителей будут си налы:
. , с с . ЗОгЫ- хао)
«v т;
х т
{о
iЈ
i;
io
Второй из данных сигналов суммируется с внутренней ЭДС па сумматоре 10, на выходе которого формируется промежуточная ЭДС EQ в поперечной оси
EQ
которая является опорной (поляризующей) для синусоидального сигнала
/ТЬ сформированного на выходе усилителя 7. Ортогональная составляющая этого сигнала, совпадающая по фазе с промежуточной ЭДС, в сумме с последней дает ЭДС в поперечной оси Ео, т.е.
Е 4 + j(xC°d- xn)(ii;Xo il
где нижний индекс cj. у квадратной скобки означает проекцию вектора в этих скобках на поперечную ось.
Так как фазы ЭДС EQ и Ел в попе,
речной оси совпадают, то величина Е
Ч
может быть найдена путем суммирования величин векторов Ел и M(xli
).L qj
i EQ )1
- /
cos( - + argl - argFQ .
В устройстве необходима только величина ЭДС в поперечной оси, по которой определяется полный ток ротора. Поэтому реализовано формирование ЭДС в поперечной оси путем суммирования
не синусоидальных сигналов, а их модулей. С этой целью производится выделение модуля проекции синусоидалъ / С С
ного сигнала j (х ad - xq() (Iio /Т io )x fl на поперечную ось машины благодаря использованию синусоидальной промежуточной ЭДС в поперечной оси EQ как поляризующего (о юркого) напряжения. Реализация осуществлена с помощью Аазочувотвитольного выпрямителя 28, на входы которого поданы синусоидальные сигналы FQ(опорный -игнал)и j(xaj- х„). dto/Т)- l На виходе этого выпрямителя образуется сигнал, который, пройдя фильтр k нижних частот, преобразуется в сигнал постоянного тока (хЈ,с1 x0()«
) T cos ( -argE), являющийся модулем проекции вектора
J(xad хо)(1ь/1Јо) на поперечную ось. Этот сигнал подаемся на один из входов сумматора 11, на другой вход которого поступает величина промежуточной ЭДС в поперечной оси. Она образуется благодаря прохождению синусоидального сигнала этой ЭДС выхода сумматора 10(С2) через выпрямитель 49 и фильтр 40 лижних часто. На выходе сумматора 11 сф| рлируетсн ЭДС j поперечной оси Ел , которая чс-реч кан ш второго информационного входа ключа 50 поступа- Т на информационный вход управляемого усилителя 14. На выходе этого усилителя будет сигнал полного тока ротора, т.е.
(.)E К
{ 4iio
Этот сигнал подан на один из входов блока 22 сравнения, а на другой вход - сигнал I, с задатчика 44 допустимого тока ротора. На выходе блока 22 .разуется рассогласование l - I , которое через канал инфор- мациокйэго входа ключа 52 и элемент 25 выборки и хранения сигнала поступает на вход вентиля 45. В режиме подготовки элемент 25 выборки и хранения сигнала запоминает рассогласование I,-I, . Через вентиль 45 данное рассогласование, если оно положительно, воздействует на коэффициент усиления управляемого усилителя 15. Фор м та и бретения
Устроит вл для вычисления располагаемой реактивной м 4 юсти явнопо0
5
0
5
0
5
0
5
0
5
люсных синхронных машин, содержащее датчики текущих значений напряжений и тока статорной обмотки, преобразователь тока в напряжение, блок сдвига фазы на 90°, первый, второй, и третий усилители, первый, второй и третий сумматоры, первый, второй и ipc-тнм фазочуво гвг, ельны. i ьп.рямнте- ли, первый, второй и третий управляющие усилители, умножитель, блок нелинейности тит экспоненты, блок сравнения фаз, первый, второй, третий и четвертый блоки сравнения, первый, второй и третий элементы выборки и хранения сигнала, первый, второй, третий и четвертый выпрямители, с первого по восьмой фильтры нижних частот, задатчик тока холостого хода ротора, задатчик допустимого тока статора, задатчик допустимого тока ротора, управляющие входы ключей объединены и являются входом задания режима устройства, выход датчика текущего значения тока статорной обмотки через преобразо- ватель тока в напряжение подключен к входу задания фазы первого фазо- чувствительного выпрямителя, вход задания опорного сигнала которого соединен с выходом датчика текущего значения напряжения статорной обмотки, а выход через первый фильтр нижних частот - с первым входом блока сравнения фаз, к второму входу которого через второй фильтр нижних частот подключен выход второго фаэо- чувствительного выпрямителя, выход первого управляемого усилителя соединен с входом первого выпрямителя, выход которого через третий фильтр нижних частот подключен к первому входу первого блока сравнения, вто- рой вход которого соединен с выходом задатчика допустимого тока статора, выход датчика текущего значения напряжения статорной обмотки подключен к первому входу первого сумматора, входу задания опорного сигнала второго фазочувствительного выпрямителя, входу блока сдвига фазы на 90 и входу второго выпрямителя, выход которого через четвертый фильтр нижних частот соединен с первым входом умножителя, второй вход которого подключен к выходу пятого фильтра нижних частот, а выход является выходом устройства, выход первого усилителя соединен с вторым
входом первого сумматора, выход которого подключен к первому входу второго сумматора и входу третьего выпрямителя, выход которого через шестой фильтр нижних частот подключен к входу блока нелинейного типа экспо- ненты; выход которого соединен с первым входом второго блока сравнения и первым информационным входом пер- вого ключа, выход которого подключен к информационному входу второго управляемого усилителя, вход задания коэффициента усиления которого через первый элемент выборки и хранения сиг- нала соединен с выходом второго ключа, а выход - с информационным входом третьего ключа и первым входом третьего блока сравнения, второй вход которого подключен к выходу эадатчика тока холостого хода ротора, а выход- к информационному входу второго ключа выход третьего ключа подключен к входам второго и третьего усилителей, выход второго усилителя соединен со вторым входом второго сумматора, выход которого подключен к входу задания опорного сигнала третьего фа-зо- чувствительного выпрямителя и входу четвертого выпрямителя, выход кото- рого через седьмой фильтр нижних частот соединен с первым входом третьего сумматора, выход которого полклю . , первому информационному входу ne i того ключа, а пторой г д ъ с мой фильтр частот - к ;/.ходу |регр 10 фазочувствительного выпрямитотя, вход задания фазы которого соединен с ьы ходом третьего усилитоля, второй информационный вход четвертого ключа подключен к ныходу шестого фильтра нижних частот, а его выход - к входу третьего управляемого усилителя, выход которого подключен к первому входу четвертого блока сравнения и вто- рому входу второго блока сравнения,
выход которого соединен с ий- ормаци- онным входом пятого ключа, пыход которого через второй элемент выборки и хранения сигнала подключен к входу задания коэффициента усиления третьего управляемого усилителя, выход за- датчика допустимого тока ротора соединен с вторым входом четвертого блока сравнения, выход которого подключен к информационному входу шестого ключа, выход которого соединен с входом третьего элемента выборки и хранения сигнала, отличающееся тем что, с целью упрощения устройства, оно содержит фазовый модупятор, четвертый фазочувствительный выломите ль вентиль и четвертый управляемый усилитель, причем информапигпный вход первого упраглаемог . т,лителя ее динен с выходом датчика тр лущугс чьа- чения напряжения ст.чгрчой обмотки, вход задания коэфФ ,,нента усилении - с выходом первого О юка сравнения, а выход первого управляемого усилптегя соедине входом задания сдвига фазы фазового модулятора, информационный вход которого подключен к выходу блока сравнения з, а выход к информационному ВХО.П створ: огг утфавля- емого усилителя, аыход которого подключен к втпрсиу информационному DXO- j/ кжсча, входу первого усили eJfF чходу задания фазы второго фа- 1счувствительного выпрямителя и входу задания фазы четвертого фазочувсгв$- тельного выпрямителя, вход задания опорного сигнзпа которого соединен с выходом блока фаз на 90°, а выход - с входом пятого фильтра них частот, выход третьего элемента выборки и хранения сигнала соединен с входом вентиля, выход которого подключен к входу задания коэффициента усиления четвертого управляемого усилителя.
;
/}(««№
///V
/у,
я0
1,5
1,0
0,5
4
Щи 1.2.
| Устройство для измерения мощности | 1955 |
|
SU110366A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1985 |
|
SU1458880A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
