Изобретение относится к подъемно транспортным машинам, в частности к устройствам для уравновешивания ме ханизмов подъема, преимущественно для манипуляторов. Известно устройство для.уравнове™ шивания механизмов подъема, содержащее рычаг с грузом, установленный на поворотной оси и соединенный с кривошипом, палец которого расположен в пазу кулисы и связан с ней посредством пружины, при этом поворотная ось кулисы устамодлена в опоре и расположена на общей вертикальной прямой с осью рычага tl3. Недостатком данного устройства является большая длина кулисы, сложность подбора и настройки пружины, обусловленные тем, что величина-дефо мации пружины устанавливается равной расстоянию от пальца кривошипа до поворотной оси кулисы. Цель изобретения - уменьшение габаритов устройства и обеспечения удобства его эксплуатации, Поставленйая цель достигается -тем что устройство для уравновешивания механизмов подъема, содержащее рычаг с грузом, установленный на поворотной оси и соединенный с кривошипом, палец которого расположен в пазу кулисы и связан с ней посредством пружины, при этом поворотная ось кулисы установлена в опоре и рас .положена на о§аей вертикальной; прямо с осью рычага, снабжено кулачком, .установленным на поворотнсЯ оси рычага и жестко скрепленным с послед ним,и подвижной кареткой с направля1йцими,при этом опора поворотной оси кулисы закреплена на нагфавляюишх упомянутой каретки, снабженной роликом, кинематически связанным с кулач ком. На чертеже представлено устройств дпя уравновешивания механизмов подъ4 ема. . Устройство содержит рычаг 1, связанный с кривошипом 2 и кулачком 3. При этом рычаг 1 вращается относительно поворотной оси 4,установленной на неподвижной опоре5. К кривошипу 2 прикреплен палец .6, связанный с кулисой 7. Кулиса 7 вращается вокруг поворотной оси 8, параллель ной поворотной оси рычага и установленной на опоре 9. Опора 9 закреплейа на подвижной каретке 10, перемещающей ся в прямолинейных направляющих 11 и контактирующей через ролик 22 с кулачком 3. Кулиса 7 взаимодействует с пальцем 6 кривошипа 2 и связана с ним пружиной растяжения - сжатия 13, В случае использования пружины сжатия кулачок 3 имеет кинематическое замыкание. Рычаг 1 нагружен грузом 14, В исходном положении поворотная ось 4 рычага 1,скрепленнЪго жестко с кривошипом 2, кулачком 3 и грузом 14, поворотная ось 8 кулисы 7 и палец б кривошяпа 2 расположены на вертикальной прямой. Устройство работает следующим образом. „При повороте рычага 1, скрепленного с кривошипом 2 и кулачком 3 и нагруженного грузом 14, кулиса 7 поворачивается относительно оси 4.Одновременно опора 9 поворотной оси 8, жестко закрепленная на подвижной ка1эетке 10, перемещается прямолинейно: :3 нап авляквдих 11, палец 6 кривошипа 3 перемещается по пазу кулисы 7.Это вызывает деформацию пружины 13. Поворот рычага 1 приводит к возникновению момента М от веса рычага, скрепленного с кривошипом, кулачком и;-:грузом, равного М. G г S in о:; где G - вес груза.и рычага с кривошипом и кулачком; г - расстояние от центра -тяжести рычага с кривошипом, кулачком, грузом до поворотной оси рычага; Ы. - угетт поворота рычага. Одновременно при повороте рычага 1 всл-еястгние деформации пружины 13 появляется уравновешивающий момент М.,, определяемый по зависимости «tV-iK-lr- - i 1 - длина пружины в свободном состоянии; 1д - расстояние от пальца кривошипа до поворотной оси рычага; 1, - расстояние от поворотной оси рычага до поворотной оси кулисы;М - величина деформации пружины; с - жесткость пружины. Величина деформации пружины зависит т угла поворота рычага и равна: . sin fdoL словие уравновешивания рычага с груом, скрепленного с кривошипом и куачком, определяется в-ыражением зт . S-V-b -fiравновешивание рычага с грузому куачком и кривошипом в заданном диапаоне изменения угла поворота рычага беспечивается моментом, создавае1 им илой деформированной пружины, возниающей при .вращении кулисы 7 относиельно оси 4 и одновременном перемещеии опоры 9 оси 4 кулисы 7 с помощью одвижной кареткиГ 10 и кулачка 3. Радиус кулачка 3 определяется по з висимости .i, - (. (5 где 1 - величина определяемая из выражения (4 ); Ц - длина каретки; Ry,- радиус ролика. Технико-экономический эффект изобретения основан на уменьшении габаритов и веса устройства и улуч шения условий его эксплуатации.Пре варительные исследования показали что применение данного устройства 40 в механизмах уравмовеишвания копирующих манипуляторов, например типа М-55, позволит за счет уменьшения габаритов уравновешивашцих устройств снизить их вес на 2,1 кг в одном маг нипуляторе. При стоимости сташьяого литья 0,3284 руб. за 1 кг и прогреалме выпуска манипулят( г 800 taT, экономия отельного литья составит 1680 кг или 552 руб. Применение иэобретения позволит также обеспечить бсхпее полное уравновешивание манипу лятора во всем диапазоне профильных и фронтальных смещений звеньев и тем самым сделает работу оператора менее утомительной.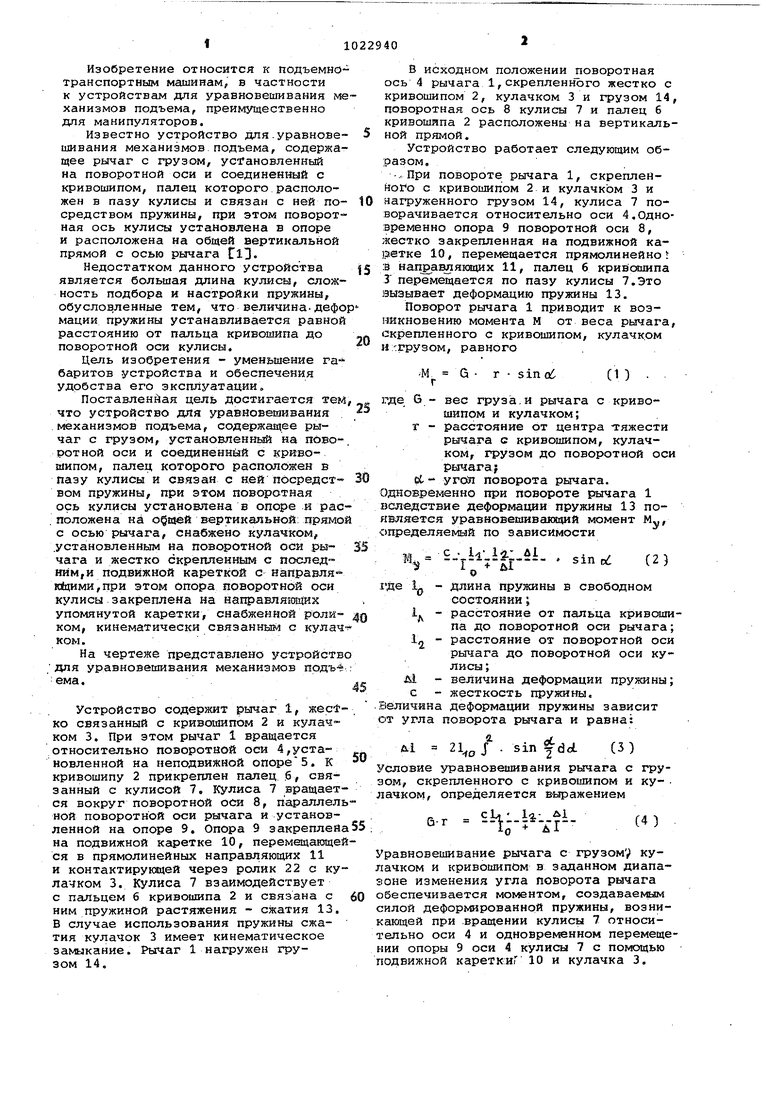
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ ПОВОРОТНОГО РЫЧАГА | 1973 |
|
SU369096A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
| Устройство для перегрузки сырых кирпичей с формовочного стола пресса на вагонетки пропарочной камеры | 1950 |
|
SU109610A1 |
| Привод каретки перчаточного автомата | 1989 |
|
SU1652402A1 |
| Устройство для газопламенной закалки кулачков | 1986 |
|
SU1407966A1 |
| Механизм уравновешивания поворотного рычага | 1977 |
|
SU616476A1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Привод перчаточного автомата | 1989 |
|
SU1647054A1 |
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU711369A1 |
УСТРОЙСТВО ДШ УРАВНОВЕШИ- ВАНИЯ МЕХАНИЗМОВ ПОДЪЕМА, преимущественно для манипуляторов, содержаЕ е, рычаг .с грузом, установленный на поворотной оси и соединен;ный с кривсшивом, палец которого расположен в пазу кулиры и связан с ней посредством- пружины, при этом поворотная ось кулисы установлена в опоре и расположена на Общей вертикальной прямой с осью рачага, о т л и-ч а. ю ta е е с я тем, что, с целью уменьшения rai6apHTOB уст ройства и обеспечения удобства его { эксплуатации, оно оНайяейо кул&чком, Установленшям на поворЪтаой:оси рычага и жестко скре пленным с поблёДним, и п здви;кяой кареткой с направляющими, при зтсш опора поворотной оси кУлисы закреплена на направляю- . ЦИК каретки, снабженной роликом, кинейит ески связанным с кулачком. «