1
Изобретение относится к области машиностроения, точнее, к механизмам уравновешивания, используемым в манипуляторах, грузоподъемных механизмах -и тому подобных устройствах.
Известны механизмы уравновешивания новоротных рычагов, предназначенные преимуш,ественно для манипуляторов и содержащие скрепленный с рычагом кривошип, палец которого взаимодействует с пазом кулисы, соединенной с указанным пальцем нажимной пружиной.
В соответствии с изобретением механизм выполнен с последовательно расположенными на обшей вертикали пальцем кривошипа и осями врашения кулисы и рычага, причем расстояние между указанными осями равно плечу кривошипа.
Такое выполнение механизма обеспечивает повышение степени уравновешивания веса рычага.
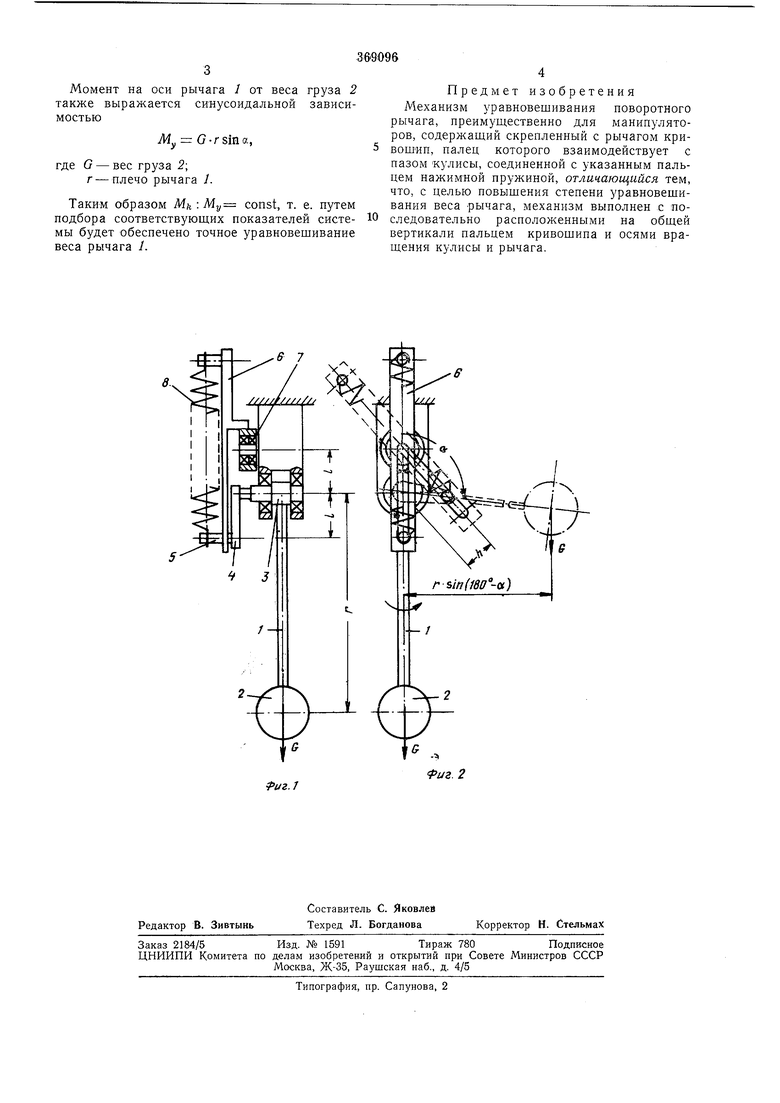
На фиг. 1 схематически изображен механизм уравновешивания, вид с торца; на фиг. 2 - то же, вид сбоку.
Рычаг / несет груз 2 и врашается на валу 3, на конце которого укреплен также кривошип 4. Палец 5 последнего взаимодействует с пазом кул.исы 6, врашаюшейся на подшипниках 7. Палец 5 и кулиса 6 соединены между собой пружиной 8. Оси врашения кулисы 6,
рычага 1 и палец 5 кривошипа 4 расположены на обшей вертикали, причем плечо кривошипа 4 равно расстоянию между осями врашения рычага / и кулисы 6. При повороте рычага вместе с ним будет разворачиваться и кривошип 4, увлекаюший за собой и кулису 6 (пунктир на фиг. 2).
При этом продольная ось S всегда будет проходить через ось врашения кулисы 6. Вследствие поворота на кривошипе 4 возникает момент
(1)
M, P-h,
где Р - усилие сжатия пружины 5;
h - плечо приложения усилия пружины 8.
В свою очередь, усилие пружины, находящейся в исходном положении в ненагруженном состоянии, составит
Р C2I sin - ,
(2)
&
постоянная жесткость пружины 8; плечо кривошипа 4
угол поворота рычага /
и h lcosa.,(3)
M,, P.h: lCslna.
(4)
30
Момент на оси рычага / от веса груза 2 также выражается синусоидальной зависимостью
7W G-rsina,
где G - вес груза 2
г-плечо рычага /.
Таким образом Mfe:My: z const, т. е. путем подбора соответствующих показателей системы будет обеспечено точное уравновешивание веса рычага /.
Предмет изобретения Механизм уравновешивания поворотного рычага, преимущественно для манипуляторов, содержащий скрепленный с рычагом кривошип, палец которого взаимодействует с пазом кулисы, соединенной с указанным пальцем нажимной пружиной, отличающийся тем, что, с целью повыщения степени уравновешивания веса рычага, механизм выполнен с последовательно расположенными на общей вертикали пальцем кривошипа и осями вращения кулисы и рычага.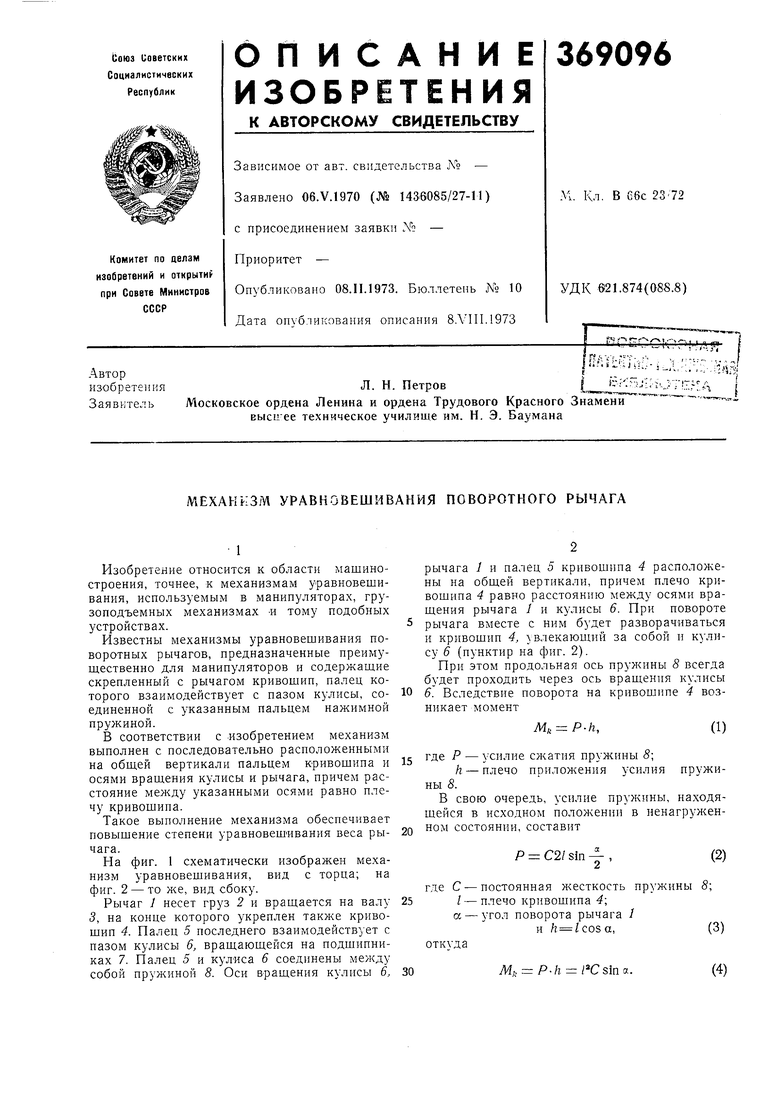
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания механизмов подъема | 1982 |
|
SU1022940A1 |
| Еханизм уравновешивания поворотного рычага | 1973 |
|
SU484173A2 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Механизм уравновешивания поворотного рычага | 1988 |
|
SU1596154A2 |
| Механизм уравновешивания поворотного рычага | 1977 |
|
SU616476A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| Устройство для установки и снятия грузов к грузопоршневым манометрам | 1977 |
|
SU711369A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Автооператор | 1978 |
|
SU779011A1 |
| Механизм уравновешивания поворотного рычага манипулятора | 1977 |
|
SU617255A1 |
