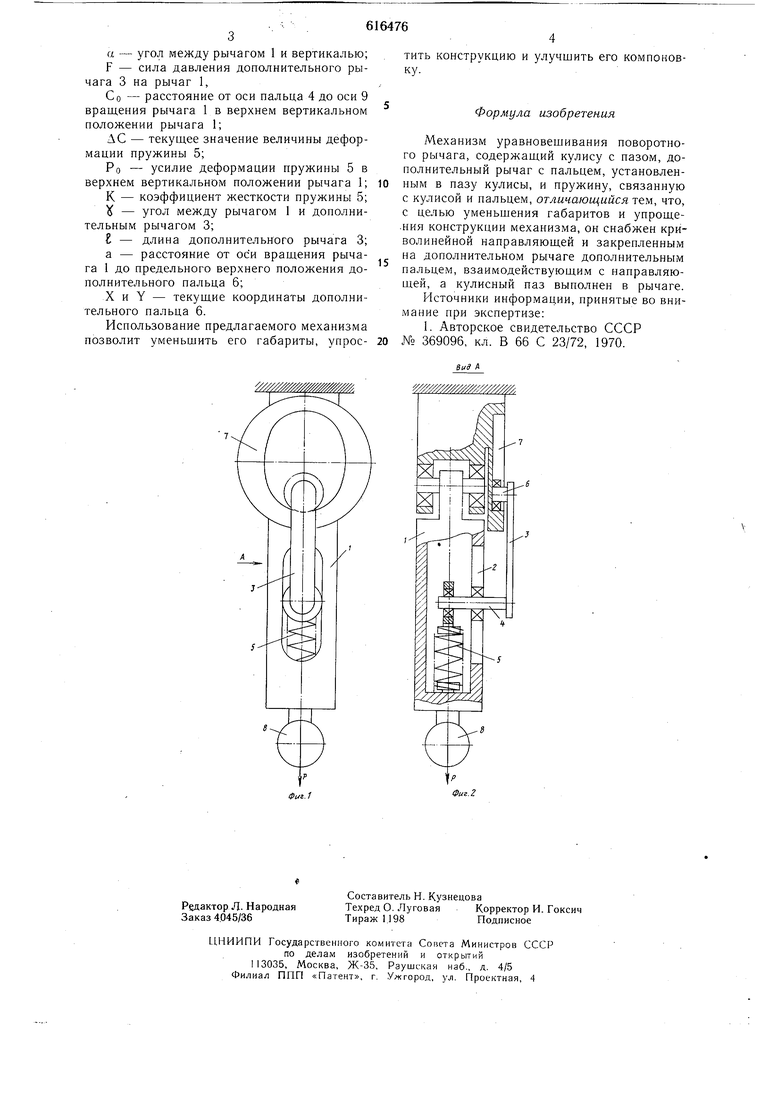
Изобретение относится к машиностроению, а именно к устройствам уравновешивания, и предназначено для использования в манипуляторах и грузоподъемных механизмах. Известен механизм уравновешивания поворотного рычага, содержаший кулису с пазом, дополнительный рычаг с пальцем, установленным в пазу кулисы, и пружину, связанную с кулисой и пальцем 1. Однако и дополнительный рычаг расположены вне уравновешиваемого рычага, что приводит к увеличению габаритов механизма и усложнению его конструкции. Целью изобретения является уменьшение габаритов и унрощение конструкции механизма. Это достигается тем, что механизм снабжен криволинейной нанравляюш,ей и закрепленным на дополнительном рычаге дополнительным пальцем, взаимодействующим с направляющей, а кулисный паз выполнен в рычаге. Иа фиг. 1 изображен механизм, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1. Механизм состоит из рычага 1, являющегося одновременно кулисой, с кулисным пазом 2, дополнительного рычага 3 с пальцем 4, связанным с пружиной 5, закрепленной другим концом с рычагом 1. На дополнительном рычаге 3 закреплен дополнительный палец 6, взаимодействующий с криволинейной направляющей 7. На рычаге 1 закреплен груз 8. Механизм работает следующим образом. При повороте рычага 1 взаимное расположение рычага 1 и дополнительного рычага 3 изменяется под действием .нружины 5 и панрав;1яющей 7 так, что результирующий момент от силы тяжести груза 8 и силы давления дополнительного рычага 3 на рычаг 1, действующий на рычаг 1, равен нулю. Нрофиль направляющей 7, обеспечивающий равенство уравновешивающего момента моменту на рычаге 1 от веса груза 8, определяется следующей системой уравнений , PL sin (X F (Со-AC) I F (Po + КЛС) tgj X (Co -AC) sin a - Lcos (90°-a--y ) Y a -f 1 sin (a + У ) - (С о - AC) cos /. |f tg(« + ) где P - сила тяжести груза 8; L - длина рычага 1; а - угол между рычагом 1 и вертикалью; F - сила давления дополнительного рычага 3 на рычаг 1, GO - расстояние от оси пальца 4 до оси 9 вращения рычага 1 в верхнем вертикальном положении рычага 1; ДС - текущее значение величины деформации пружины 5; РО - усилие деформации пружины 5 в верхнем вертикальном положении рычага 1; К - коэффициент жесткости пружины 5; - угол между рычагом 1 и дополнительным рычагом 3; t - длина дополнительного рычага 3; а - расстояние от оси вращения рычага 1 до предельного верхнего положения дополнительного пальца 6; X и Y - текущие координаты дополнительного пальца 6. Использование предлагаемого механизма позволит уменьщить его габариты, упростить конструкцию и улучщить его компоновку. Формула изобретения Механизм уравновещивания поворотного рычага, содержащий кулису с пазом, дополнительный рычаг с пальцем, установленным в пазу кулисы, и пружину, связанную с кулисой и пальцем, отличающийся тем, что, с целью уменьщения габаритов и упроще.ния конструкции механизма, он снабжен криволинейной направляющей и закрепленным на дополнительном рычаге дополнительным пальцем, взаимодействующим с направляющей, а кулисный паз выполнен в рычаге. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 369096. кл. В 66 С 23/72, 1970.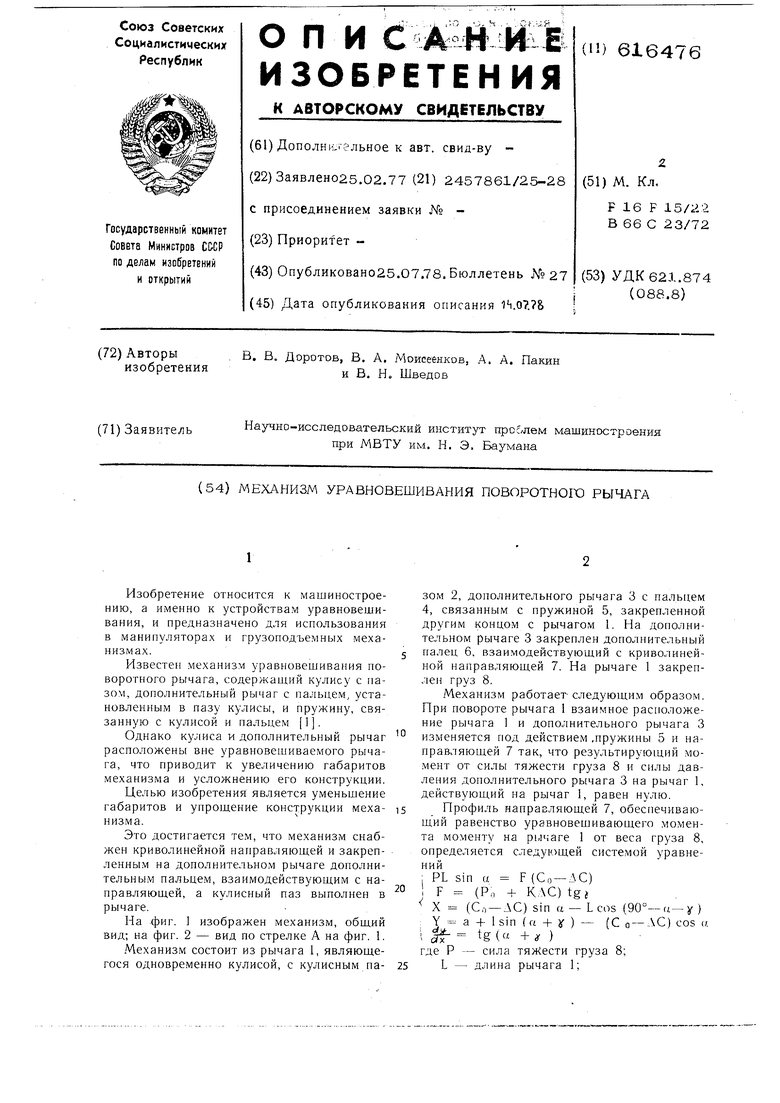
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания поворотного рычага | 1988 |
|
SU1596154A2 |
| Устройство для уравновешивания механизмов подъема | 1982 |
|
SU1022940A1 |
| Весовое устройство к чесальным машинам | 1982 |
|
SU1079705A1 |
| Уравновешивающий механизм | 1983 |
|
SU1114829A1 |
| КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1994 |
|
RU2091641C1 |
| ДВЕРНОЙ ЗАМОК | 1999 |
|
RU2176012C2 |
| ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР ЧИСЛА ОБОРОТОВ | 1971 |
|
SU289634A1 |
| Механизм уравновешивания манипулятора | 1987 |
|
SU1437215A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2017 |
|
RU2671666C1 |
| Устройство для дуговой сварки с колебаниями электрода | 1983 |
|
SU1094695A1 |
