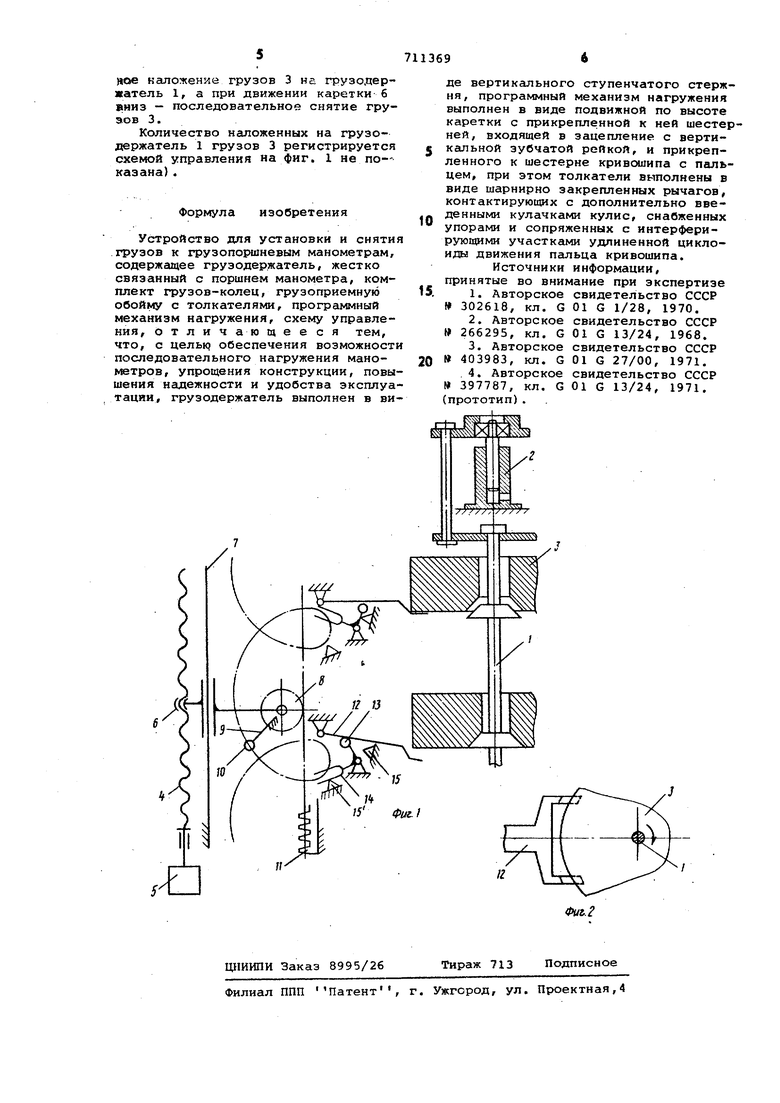
(54) УСТРОЙСТВО ДЛЯ УСТАНОВКИ И СНЯТИЯ ГРУЗОВ к ГРУЗОПОРШНЕВЫМ МАНОМЕТРАМ прикрепленного к шестерне кривошипа с пальцем, при этом толкатели выполнены в виде шарнирно закрепленных рычагов, контактирующих с дополйител но введенными кулачками кулис, снабженных упор.ами-и сопряженных с ин.терферируюшими участками удлиненной циклоиды движения пальца кривошипа. На (Ьиг, 1 схематично изображен общия вид предлагаемого устройства; на Лиг. 2 - возможная форма части толкателя, -взаимодействующей с грузом. Устройство состоит из ступенчатого стержня. 1, связанного с вращающим ся поршнем манометра 2 посредством подшипника и имеющего устройство для предотвращения вращения (на схеме не показаны). На ступенчатом стержне 1 размещены грузы 3. Программный механизм состоит из винта 4, связанного с приводом 5. Перемещающаяся каретка б расположена на винте 4 и на направляющей 7. На каретке 6 закреплен шестеряя 8 с кривошипом 9 и пальцем 10. Шестерня 8 находится в зацеплении с рейкой 11. Палец 10 имеет траекторию движения в виде удлиненной циклоиды. Толкатели 12 выполнены в виде шарнирно закрепленных рычагов, которые контактируют с кулачками 13 кулис 14.. Оси качани кулис 14 расположены на перпендикулярах к рейке 11, проходящих через вершины интерферирующих участков удлиненной циклоиды, а оси пазов ку лис 14 сопряжены с интерферирующими участками этой циклоиды. В крайних положениях кулис 14 установлены упоры 15, фиксирующие качаю щиеся устройства кулис 14 под действием веса толкателя 12. Фиксирующее действие веса толкателя может быть усилено пружиной (на схеме не показана). Каждый груз 3 контактирует с несколькими толкателями 12. Форма толкателя в виде плоского рычага позволяет создать на одном толкателе две разнесенные между собой точки Взаимодействия с грузом и таким образом дает возможность .применить два толкателя вместо Толкатели 12, контактирующие с одним и тем же грузом, выполнены иден тично. Между винтами 4 (на фиг. 1 показан один винт 4) имеется кинема тическая связь. В случаях, когда высота груза более, чем в два раза, меньше длины развернутой делительной окружности шестерни, возможность более плотной компановки грузов на грузодёржателе посредством установки дополнительных кривошипов с пальцами, прикрепленных к шестерне. Пальцы кривошипов имеют траектории движения в виде удпиненных циклоид, сдви нутых по фазе друг otнocитeльнo дру г-а, на интерферирующих участках которых соответствонио могут г«ть установлены дополнительные кулисы с кулачками, упорами и толкателями, взаимодействующими с дополнительными грузами. Устройство работает следующим образом. При вращении винта 4 в том или ином направлении, благодаря наличию направляющей 7 и резьбы на каретке 6, каретка 6 совершает соответственно поступательное движение вверх или вниз. При движении клретки 6 вверх шестерня 8 перемещается вверх по неподвижной зубчатой рейке И, вращаясь при этом по часовой стрелке. Одновременно с шестерней 8 начинает перемещаться и жестко связанный с ней кривошип 9 с пальцем 10, причем палец 10 начинает описывать удлиненную циклоиду. Эта форма его движения позволяет при достижении интерферирующего участка траектории пальцу 10 безударно входить в паз кулисы 14 и смещать ее с упора 15 с преодолением при этом веса толкателя 12 с грузом 3 с помощью жестко связанного с кулисой 14 кулачка 13, После прохождения кулисой 14 положения неустойчивого равновесия палец 10 выходит из кулисы 14, и она занимает другое крайнее положение и фиксируется упором 15 под действием веса толкателя 12. При этом толкатель 12 поворачивается на оси и опускает груз 3 на ступеньку грузодержателя 1, а сам опускается ниже поверхности груза 3, с которой он взаимодействовал, на расстояние, обеспечивающее вертикальное перемещение грузодержателя 1 без контактирования со снятым грузом 3 в границах рабочего хода поршня манометра 2 . При продолжении движения каретки 6 вверх все выше расположенные грузы 3 будут последовательно накладываться на грузодержатель 1 аналогично. При движении каретки 6 вниз палец 10 аналогично последовательно взаимодействует с кулисами 14 грузов 3, расположенных внизу по ходу каретки 6. Кулиса 14 совершает поворот по часовой стрелке, одновременно поворачивая кулачок 13, который посредством толкателя 12 снимает груз 3 с грузодержателя 1 и поднимает на высоту, обеспечивающую отсутствие контактирования снятого груза 3 с вертикально перемещающимся грузодержателем 1 в границах рабочего хода поршня манометра 2. Кулиса 14 в крайнем положении фиксируется на.упоре 15 посредством веса толкателя 12 с грузом 3. Таким образом при движении каретки 6 вверх осуществляется последователь