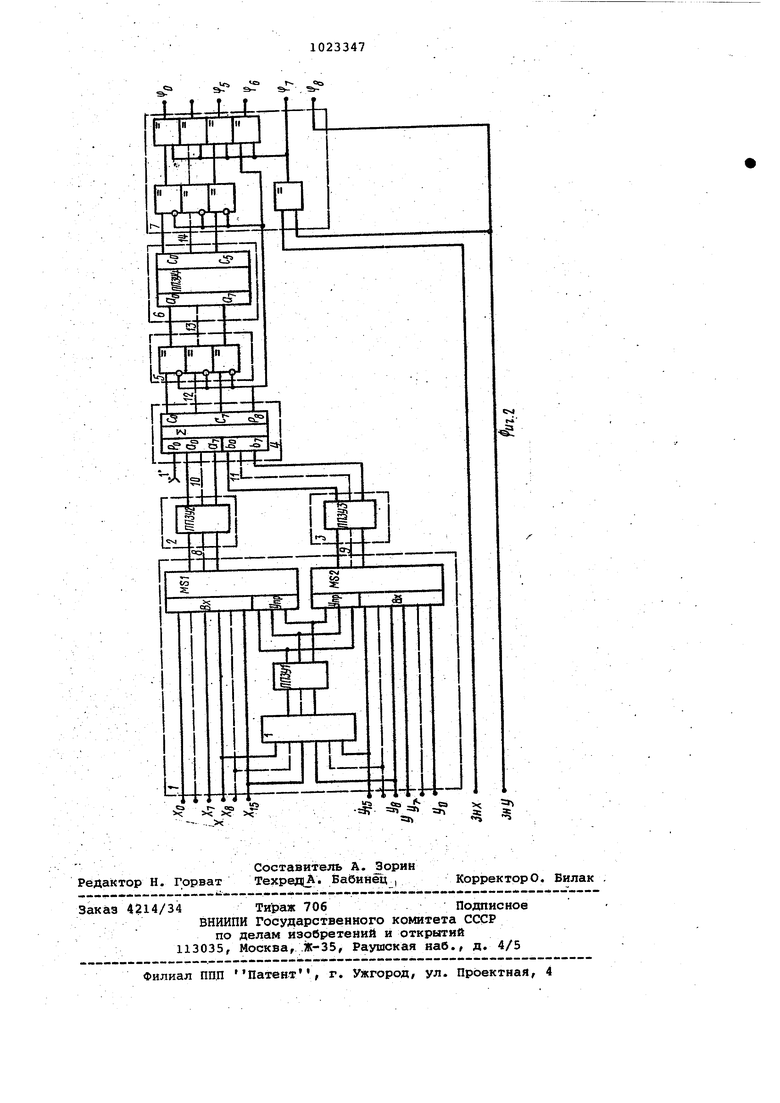
Изобретение относится к вычислительной технике и может использовать ся в устройствах преобразования координат, моделирующих устройствах, в аппаратуре передачи данных. Известно устройство, содержащее регистр, синусный и косинусный преобразователи, первые входы которых соединены с соответствующими входами устройства, сумматор, входы которого соединены с выходами синусного и косинусного преобразователей, селектор знака, подключенный к выходу сумматора, анализатор, подключенный к выходу селектора знака, и логический блок, причем первый выход анализатора соединен с первым входом регистра, второй выход, анализатора соединен с первым входом логического блока, выход логического блока подключе к второму входу регистра, первый выход регистра соединен со вторьм входом синусного и косинусного преобразователей, а второй выход регистра подключен к второму входу логическог блока С11Однако известное устройство имеет малое быстродействие, обусловленное применяемым алгоритмом вычисления, и достаточно большой объем оборудования , Наиболее близким к предлагаемому по технической сути является устройство определения аргумента вектора, содержащее два нелинейных блока, вхо ды которых подключены к входам устройства, соответствующим ортогональным составляющим вектора, а выходы соединены с входами элементов суммирования и вычитания, причем выход элемента сложения подключен к первом антилогарифмическому блоку, а выход элемента вычитания - ко второму антилогарифмическому блоку, выходы антилогарифмических блоков соединены с регистрирующим прибором, при этом нелинейные блоки выполнены в виде блоков воспроизведения характеристики обратного гиперболического синуса.2. Недостатки прототипа - низкое быстродействие, определяемое временем задержки аналоговых элементов, необходимость подбора элементов для получения идентичных характеристик нелинейных элементов, сложность обес печения требуемой точности, вычислекия при изменении воздействукнцих фак торов (температура окружающей среды, самопрогрев, изменение питающего напряжения, старение элементов). Целью изобретения является повышение быстродействия. Поставленная цель достигается тем что в устройство для определения арiгумента вектора, содержащее два блока памяти и вычислитель, причем выход первого блока памяти соединен с первым входом вычитателя, выход второго блока памяти соединён со вторым входом вычитателя,,дополнительно введены сдвигатель, преобразователь обратного кода в прямой, третий блок памяти и блок сравнения, причем входы первой и второй составляющих вектора устройства соединены соответственно с первым и вторым входами сдвигателя, первый и второй выходы которого соединены с входами соот етствующих блоков памяти, выход разрядов вычитателя соединен с информационным входом преобразователя обратного кода в прямой, управляющий вход которого соединен с выходом знака вычи- тателя и входом знака разности блока сравнения, входы-знаков составляющих вектора соединены соответственно с входом знака первой и второй составляющих вектора устройства, выход преобразователя обратного кода в прямой соединен через третий блок памяти с входом аргумента блока сравнения, выход которого соединен с вы,ходом устройства. На фиг. 1 представлено предлагаемое устройство блок-схема; на фиг.2 конструктивное выполнение блоков. Устройство для определения аргумента вектора содержит сдвигатель 1, блоки 2 и 3 памяти, вычитатель 4, преобразователь 5 обратного кода в прямой, блок б памяти, блок 7 сравнения, выходы 8 и 9 сдвигателя, выходы 10 и 11 блоков памяти 2 и 3, :выход 12 разрядов вычитателя 4, выход 13 преобразователя обратного кода в прямой, выход 14 блока 6 памяти. Устройство работает по алгоритму. U-.avctg-ei l i -виУЬ где К - масштабный коэффициент и реализовано на комбинационных элементах с быстродействием, определяемым распространением сигналов с входа на выход. На вход устройства ортогональные составляющие поступаютв прямом коде со своими знаками. Сдвигатеяь 1 сдвигает одновременно значения X и У влево, так, что по крайней мере, на одном из его выходов 8 или 9 в старшем разряде будет единица, этим самьм достигается постоянно минимальная погрешность вычисления аргумента во всем заданном диапазоне изменений величины вектора. С выходов 10 и 11 блоков памяти 2 и 3 на вход вычитателя 4 поступают соответственно значения ItP и обратном коде.Обратный код результату {СнТ -Еу|Т) с выхода 12 элемента вычи ания 4 преобразуется в пдеобразорателе кода 5 в прямой код, который поступает на третий блок памяти 6,Гаппрокбимирующий характеристику lafctgi, где 2 / 0.Аппроксимация функ ции arctgf для не требуется, указанная функция имеет центральную симметрию относительно точки (45° f что используется в блоке 7, использование жe..иaIIaзQнa JZ О.для аппроксимации функций Ч arctgl позволяет с большей точностью определить аргумент в пределах 45-90. Аргумент вектора 14, вычисленный в пределах 45-90, блоке сравнения 7 -претерпевает два преобразования. Первое преобразование - доопределени аргумента в пределах первого квадранта, для этого в случае Z-К() О все разряды 14 инвертируются и к полученному результату добавляется единица в младший разряд. Для упрощения схемы для всех z- О добавление единицы происходит в элементе вычитания. После первого преобразования получаем величину f т Второе преобразование - доопределение аргумента вектора до 360
по алгоритму:
1. Х0; lf-ч У 0;
2.Х V О
3.Х 0;.180ц-Ф 0;
4. ifsaeo- f
У 0;
При использовании двоичного кода полный аргумент- вектора будет иметь по сравнению с р еще два старших разряда, причем для рассмотренных случаев соответственно,
1. Ч 00 Ь, Cw -1,,.., e-f,Ео, 2.р 01би, R -1,..., Rijeo
з.ч 1ой|, -1,..., е, во, 4.Ч -пей, ей -1,... ,
I где e,En-l,... fe «5 - двоичные разiряды 4 начиная со старшего.
Указанный гшгоритм легко реализуется на широко распространенных цифровых элементаис.
..i.
При реализации устройства на элементах 133 серии, а блоков памяти на элементах Р556РТ, время распространения сигнала менее 500 нсек, т.е. скорость аргумента вектора может достигать 2 миллионов операций в секунду.
sT,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления модуля и аргумента вектора | 1986 |
|
SU1403063A1 |
| Устройство для вычисления функций Z @ = @ @ @ / @ и Z @ = @ @ @ / @ | 1988 |
|
SU1539771A1 |
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU868753A1 |
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU926651A1 |
| Арифметическое устройство | 1978 |
|
SU780004A1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| Устройство для выбора частотных диапазонов передачи группового радиосигнала | 1982 |
|
SU1072277A1 |
| Преобразователь координат | 1988 |
|
SU1566345A1 |
| Преобразователь логарифмического кода в двоичный код | 1990 |
|
SU1716506A1 |
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АРГУМЕНТА ВВКФОРАг содержащее два блока памяти и вьпитатель причем выход первого блока памяти соединен с входе вычитателя, выход второго блока памяти соединен с вторым, входом вычитателя, о тли ч а ю ще е с я тем, что, с делью повышения |1стродействия, в него введены сдви- : гатель, преобразователь обратного кО да в прямой, третий блок памяти и блок сравнения, причем входы первой и второй составляющих вектора устрой-ства соединены соответственно с пер;вшл и вторым входёши сдвигателя, первый и второй выходы которого соединены с входами соответствующих блоков памяти, выход разрядов вычитателя соединен с информационным входом преобразователя обратного кода в прямой, управляющий в:(од которого соединен с выходом знака вычитате-ля и входом знака разности блока сравнения, входы знаков составляющих вектора блока сравнения соединены соответственно с выходом знака первой и второй состав-, ляющих вектора устройства, выход пре образователя обратного кода в прямой соединен через третий блок памяти с: входом аргумента блока сравнения, гвыход,которого сЪединен с выходом устройства. ,а
(si
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для преобразования прямоугольных координат | 1974 |
|
SU519725A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения аргумента вектора | 1978 |
|
SU763917A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
