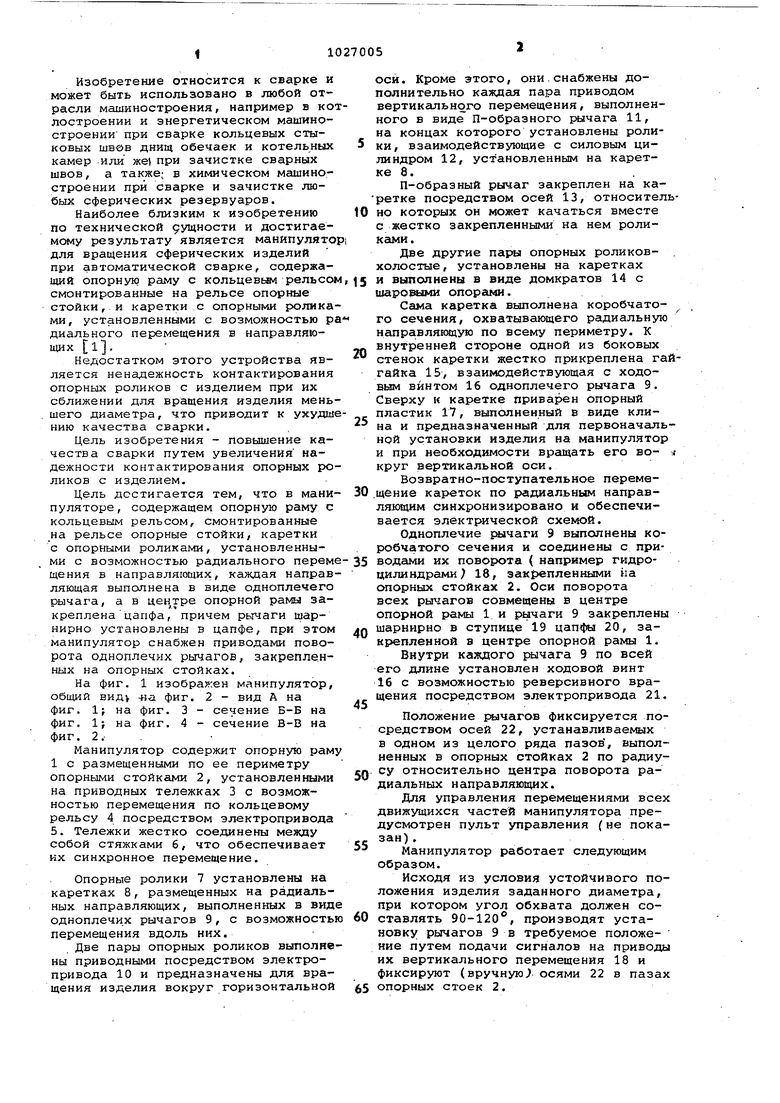
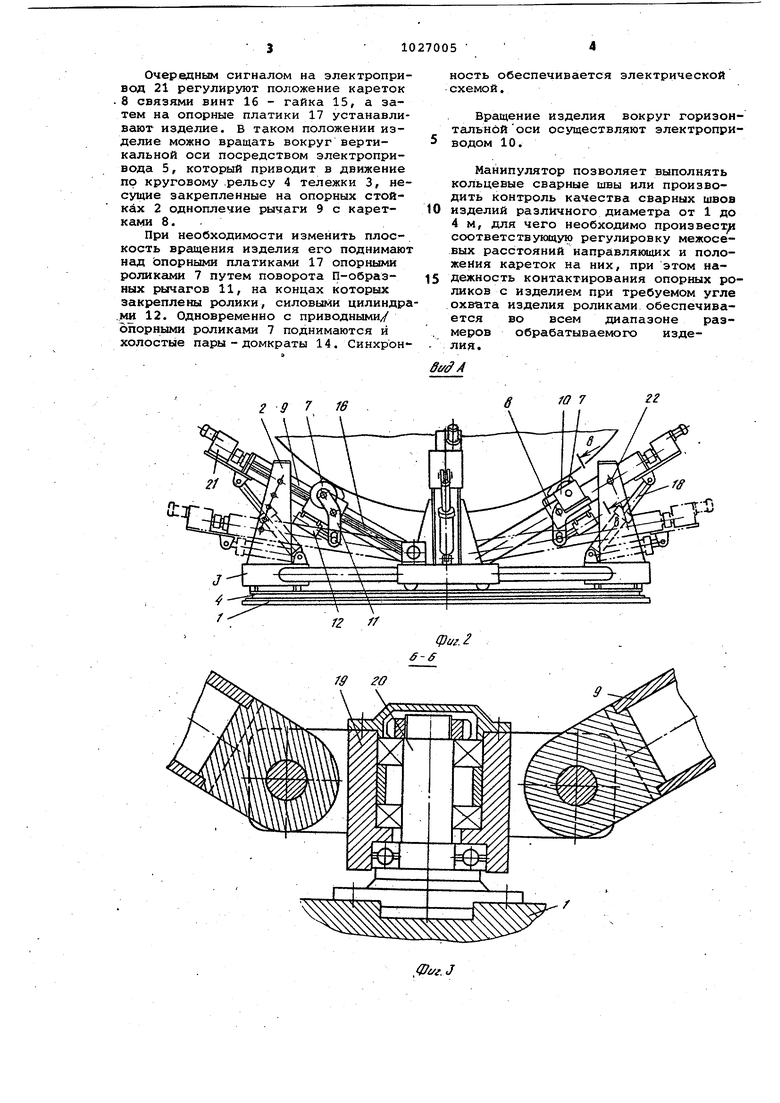
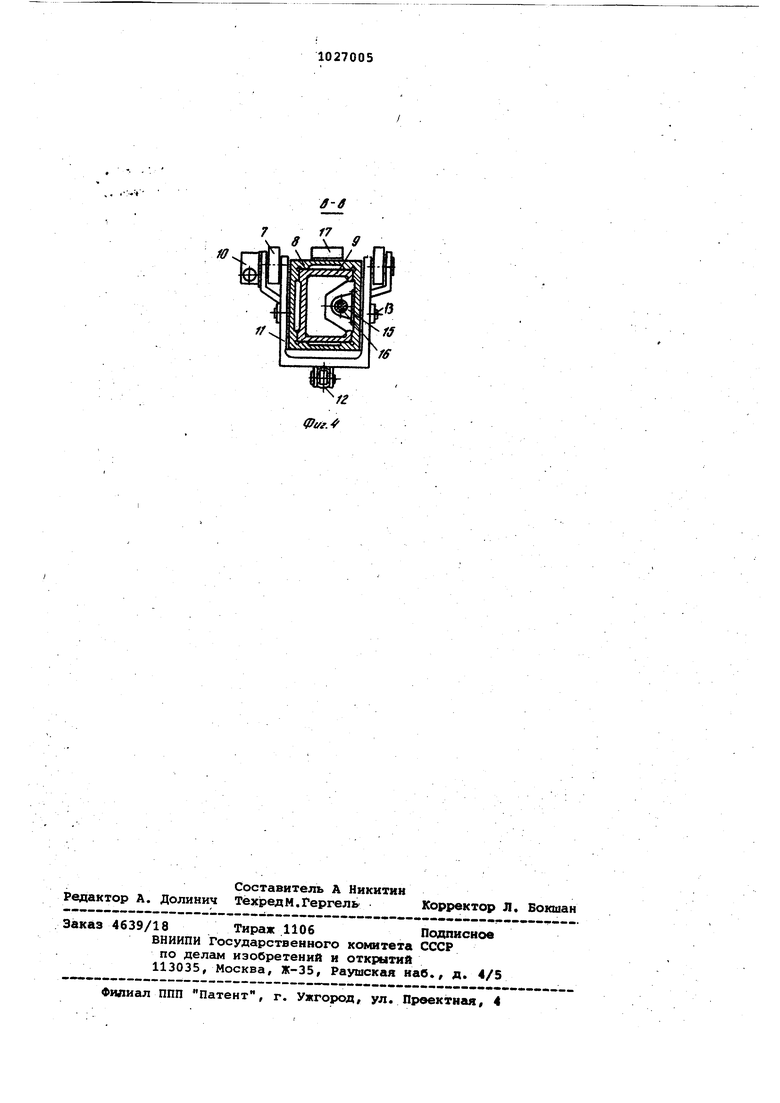
Изобретение относится к сварке и может быть использовано в любой отрасли машиностроения, например в ко лостроении и энергетическом меиииностроении при сварке кольцевых стыковых швов днищ обечаек и котельных камер или же при зачистке сварных швов, а также; в химическом машиностроении при сварке и зачистке любых сферических резервуаров. Наиболее близким к изобретению по технической ущчостк и достигаемому результату является манипулято для вращения сферических изделий при автоматической сварке, содержа1ЦИЙ опорную раму с кольцевьв«1 рельсо смонтированные на рельсе опорные стойки, и каретки с опорными ролика ми, установленными с возможностью р диального перемещения в направляющих l, Недостатком этого устройства является ненадежность контактирования onopHKix роликов с изделием при их сближении для вращения изделия мень шего диаметра, что приводит к ухудш нию качества сварки. Цель изобретения - повышение качества сварки путем увеличения надежности контактирования опорных ро ликов с изделием. Цель достигается тем, что в мани пуляторе, содержащем опорную раму с кольцевым рельсом, смонтированные на рельсе опорные стойки, каретки с опорными роликами, установленными с возможностью радиального перем щения в направляющих, каждая наорав ляющая выполнена в виде одноплечего рычага, а в опорной рамы закрепленацапфа, причем рычаги шарнирно установлены в цапфе, при этом манипулятор снабжен приводами поворота одноплечих рычагов, закрепленных на опорных стойках. На фиг, 1 изображен манипулятор, об1дий виду -на фиг. 2 - вид А на фиг. If на фиг, 3 - сечение Б-Б на фиг. If на фиг. 4 - сечение В-В на фиг. 2. . Манипулятор содержит опорную рам 1 с размещенными по ее периметру опорными стойками 2, установленными на приводных тележках 3 с возможностью перемещения по кольцевому рельсу 4 посредством электропривода 5. Тележки жестко соединены меящу собой стяжками 6, что обеспечивает их синхронное перемещение. Опорные ролики 7 установлены на каретках 8, размещенных на радиальных направляющих, выполненных в вид одноплечих рычагов 9, с возможность перемещения вдоль них. Две пары опорных роликов выполне ны приводными посредством электропривода 10 и предназначены для вращения изделия вокруг горизонтальной оси. Кроме этого, они.снабжены дополнительно каждая пара приводом вертикального перемещения, выполненного в виде П-образного рычага 11, на концах которого установлены ролики, взаимодействующие с силовым цилиндром 12, установленным на каретке 8. П-образный рычаг закреплен на каретке посредством осей 13, относительно которых он может качаться вместе с жестко закрепленными на нем роликами. Две другие пары опорных роликов- . холостые, установлены на каретках и выполнены в виде домкратов 14 с опорами, Сама каретка выполнена коробчатого сечения, охватывающего радиальную направлякяцую по всему периметру. К внутренней стороне одной из боковых стенок каретки жестко прикреплена гайгайка 15, взаимодействующая с ходовым винтом 16 одноплечего рычага 9. Сверху к каретке приварен опорный пластик 17, выполненный в виде клина и предназначенный для первоначальной устгановки изделия на манипулятор и при необходимости вргицать его во- j круг вертикальной оси. Возвратно-поступательное переме.щение кареток по радиальным направляюацгм синхронизировано и обеспечивается электрической схемой. Одноплечие Еалчаги 9 выполнены коробчатого сечения и соединены с приводами их поворота ( например гидроцилиндрами 18, saxjjenленными на сяюрных стойках 2. Оси поворота всех рычагов совмещены в центре опорной рамы 1 и рычаги 9 закреплены шарнирно в ступице 19 цап11ы 20, закрепленной в центре опорной рамы 1. Внутри каждого рычага 9 по всей его длине установлен ходовой винт 16 с возможностью реверсивного вращения посредством электропривода 21. Положение рычагов фиксируется посредством осей 22, устанавливаемых в одном из целого ряда пазов , выполненных в опорных стойках 2 по радиусу относительно центра поворота радиальных направляющих. Для управления перемещениями всех движущихся частей манипулятора предусмотрен пульт управления (не показан) , Манипулятор работает следующим образом. Исходя из условия устойчивого положения изделия заданного диаметра, при котором угол обхвата должен составлять 90-120, производят установку рычагов 9 в требуемое положение путем подачи сигналов на приводы их вертикального перемещения 18 и фиксируют (вручную осями 22 в пазах опорных стоек 2.
Очередным сигналом на электропривод 21 регулируют положение кареток 8 связями винт 16 - гайка 15, а затем на опорные платики 17 устанавливают изделие, в таком положении изделие можно вращать вокруг вертикальной оси посредством электропривода 5, который приводит в движение по круговому-рельсу 4 тележки 3, несущие закрепленные на опорных стойких 2 одноплечие рычаги 9 с каретками 8.
При необходимости изменить плоскость вращения изделия его поднимают над опорными платиками 17 опорными роликами 7 путем поворота П-образных рычагов 11, на концах которых закреплены ролики, силовыми цилиндра.ми 12. Одновременно с приводными/ опорными роликами 7 поднимаются и холостые пары - домкраты 14. Синхронность обеспечивается электрической схемой.
Вращение изделия вокруг горизонтальной оси осуществляют электроприводом 10.
Манипулятор позволяет выполнять кольцевые сварные швы или производить контроль качества сварных швов
изделий различного диаметра от 1 до 4 м, для чего необходимо произвест соответствуквдую регулировку межосевых расстояний направляющих и положения кареток на них, при этом надежность контактирования опорных роликов с изделием при требуемом угле охвата изделия роликами обеспечивается во всем диапазоне размеров обрабатываемого изделия.
//
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАЛЬНЫЙ РОБОТ БЕЛЯЕВА Н.П. | 1992 |
|
RU2080243C1 |
| ПОРТАЛЬНЫЙ РОБОТ | 1988 |
|
RU2022770C1 |
| Установка для сварки внутренних и наружных швов отводов трубопроводов | 1981 |
|
SU996150A1 |
| Кантователь | 1984 |
|
SU1260164A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| УСТАНОВКА ДЛЯ СВАРКИ СЕКТОРОВ ОТВОДОВ ТРУБ | 2021 |
|
RU2780860C1 |
| МАНИПУЛЯЦИОННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 2015 |
|
RU2607721C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ | 2005 |
|
RU2294274C1 |
| УСТАНОВКА ДЛЯ СВАРКИ ТЕПЛООБМЕННИКОВ С ЛЕПЕСТКОВЫМИ ПОВЕРХНОСТЯМИ НАГРЕВА | 1994 |
|
RU2041040C1 |
| Роликовый манипулятор | 1976 |
|
SU716756A1 |
МАНИПУЛЯТОР ДЛЯ ВРАЩЕНИЯ сФЕигаЕских издалий ПРИ АВТОМАТИЧЕСКОЙ СВАРКЕ, содержащий опорную раму fl г -XSJHf fiirtfs ЙЗЛ1дт2 д С кольцевым рельсом, смонтированные на рельсе опорные стойки, каретки с опорными роликами/ установленными и .возможностью радиального перемеще;ния в направляющих, отличающий с я тем, что, с целью повышен ния качества сварки путем увеличения надежности контактирования опорных роликов с изделием, каждая направляющая выполнена в виде одноплечего рычага, а в Центре опорной рамы закреплена цапфа, причем рычаги шарнирно установлены, в цапфе, при этом манипулятор снабжен приводами поворота одноплечих рычагов, закрепл.енными на опорных стойках. (Л Л (
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МАНИПУЛЯТОР ДЛЯ ВРАЩЕНИЯ ШАРОВЫХ РЕЗЕРВУАРОВВСЕСОЮЗНАЯЛДТ!^йТНО-;1ХКк''гПНДЯ| | 0 |
|
SU340498A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| . | |||
