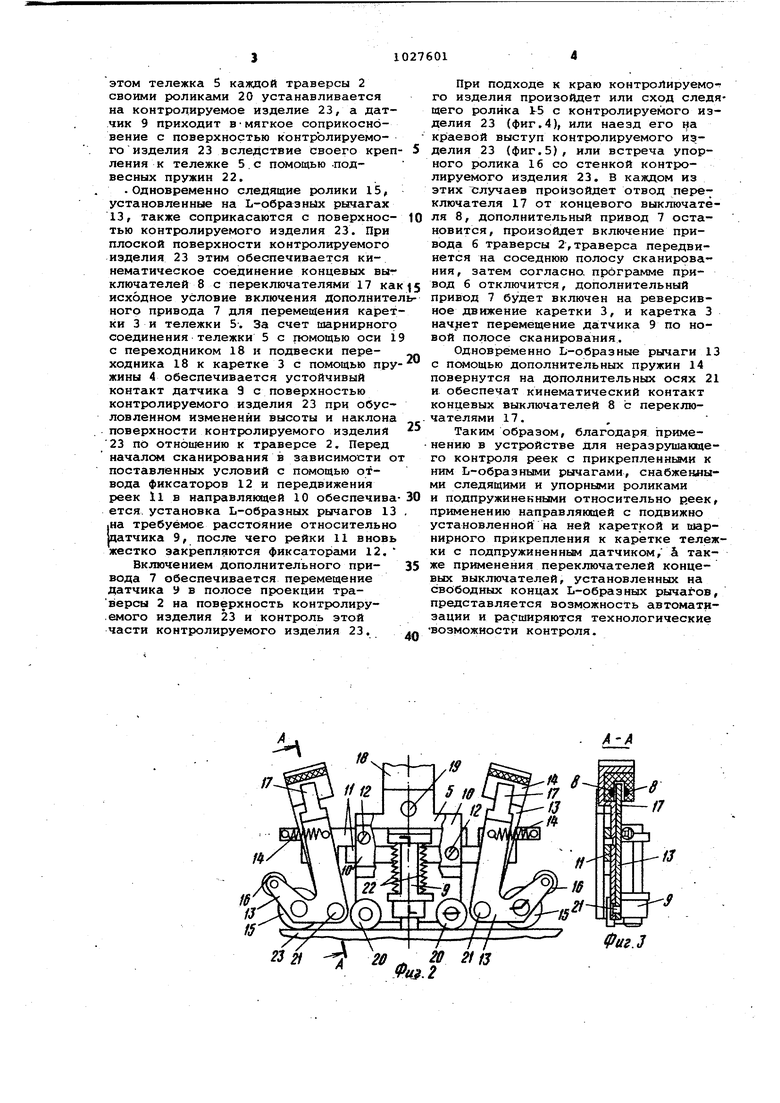
Изобретение относится к измерительной технике и может быть исполь зовано при нераэрушаквдем контроле изделий, в частности для контроля металлических плит. Известно устройство для неразрушающего контроля изделий, содержащее датчик, установленный на каретке, имекяцей привод возвратно-поступательного движения, региЬтратор дефектов и узел прерывистой подачи изделия 1. Недостатком этого устройства является то, что оно предназначено для контроля изделий только цилиндрической формы и не позволяет осуществлять контроль плоских поверхностей. Наиболее близким по технической сущности к предлагаемому является устройство для неразрушакадего контроля, содержащее станину, установленную подвижно на ней траверсу с кареткой, подвешенную к последней с помощью пружины тележку,приводы тра версы и каретки, концевые выключатели и датчик, укрепленный на тележке 2 }. Недостатками известного устройст ва являются сложность его конструкции и ограниченные технологические возможности контроля, обусловленные наличием подвижных салазок с устано ленными на них датчиками, а также необходимостью поворота изделия в процессе его контроля. Цель изобретения - расширгение технологических возможностей контроля при одновременном упрощении ко струкции. Поставленная цель достигается за счет того, что устройство для нераз рушающего контроля, содержащее станину, установленную подвижно на ней траверсу с кареткой, подвешенную к последней с помощью пружкны тележку приводы траверсы и каретки, концевы выключатели и датчик, укрепленный н тележке, снабжено направлякяцей, установленной на тележке параллельно рабочей поверхности датчика, двумя рейками, подвижно размещенньви|и в н равляющей, фиксаторами реек, двумя L-образными рычагами, шарнирно закрепленньми по обе стороны датчика концах реек и подпружиненншли допол нительными пружинами относительно р ек, подвижно соединенными с каждьм L-образным рычагом следящими ролика ми и упориьми роликами, взаимодейс вующими в процессе контроля с поверхностью контролируемого изделия и переключателями концевых выключа телей, закрепленными на свободных концах каждого L-образного рвлчага и кинематически связанншли с конце вьми выключателями, а концевые выключатели жестко закреплены на свободном конце каждой рейки. На фиг.1 изображено устройство для неразрушающего контроля, аксонометрия, общий вид; на фиг.2 - тележка, несущая подпружиненный датчик и рейки с подпружиненными относительно них L-образными рычагами; на фиг.З - разрез А-А на фиг.2; на фиг.4 - положение концевого выключателя и переключателя при съезде следящего ролика с контролируемого изделия; на фиг.5 - то же, при наезде следящего ролика на выступ на поверхности контролируемого изделия; на фиг.6 - то же, при контакте упорного ролика с выступающей стенкой контролируемого изделия. Устройство для неразрушающего контроля содержит станину 1, подвижно установленную на ней траверсу 2 (их может быть несколько) с кареткой 3, подвешенную к каретке 3 с помощью пружины 4 тележку 5, привод 6. траверсы 2, дополнительный привод 7 каретки 3, концевые выключатели 8, дат|чик 9, подпружиненно укрепленный относительно тележки 5 с возможностью перемещения вдоль оси симметрии тележки 5, направляющую 10, жестко закрепленную на тележке 5 перпендикулярно ее оси симметрии, две рейки 11, подвижно размещенные в направляющей 10, фиксаторы 12 реек 11, два L-образные рычага 13, шарнирно закреплеиные по обе стороны датчика 9 на концах реек 11 и подпружиненные дополнительными пружинами 14 относительно реек 11, следящие ролики 15 L-образных рычагов 13, упорнее ролики 16 L-образных рычагов 13 и переключатели 17, жестко закрепленные на свободных концах каждого L-образного рычага 13 и кинематически связанные с концевьми выключателями 8. Кроме того, устройство для неразрушающего контроля содержит переходник 18, подвешенный одним концом к пружине 4, а другим концом шарнирно соединенный с тележкой 5, ось 19, обеспечивающую аирнирное соединение переходника 18 с тележкой 5,, ролики 20 тележки 5, дополнительшле оси 21 для шарнирного крепления L-обраэных рычагов 13 к каждой из 11 и подвесные пружины 22 для упругого соединения датчика 9 с тележкой 5. Устройство для неразрушакадего контроля работает следующим образом. Устанавливают контролируемое изделие 23 на станину 1 и подводят траверсы 2 (их может быть несколько) в исходную позицию с интервалами между траверсами 2, обеспечивающими примерно одновременное окончание сканирования всеми датчиками 9. При этом тележка 5 каждой траверсы 2 своими роликами 20 устанавливается на контролируемое изделие 23, а дат.чик 9 приходит вмягкое соприкосновение с поверхностью контролируемого изделия 23 вследствие своего креп ления к тележке 5. с помощью-подвесных пружин 22. Одновременно следящие ролики 15, установленные на L-образных рычагах 13, также соприкасаются с поверхностью контролируемого изделия 23. При плоской поверхности контролируемого изделия 23 этим обеспечивается кинематическое соединение концевых выключателей 8 с переключателями 17 ка исходное условие включения дополните ного привода 7 для перемещения карет ки 3 и тележки 5. За счет шарнирного соединениятележки 5 с помощью оси 1 с переходником 18 и подвески переходника 18 к каретке 3 с помощью пру жины 4 обеспечивается устойчивый контакт датчика 9 с поверхностью контролируемого изделия 23 при обусловленном изменении высоты и наклона поверхности контролируемого изделия 23 по отношению к траверсе 2. Перед началом сканирования в зависимости о поставленных условий с помощью отвода фиксаторов 12 и передвижения реек 11 в направлякяцей 10 обеспечива ется. установка L-образных рычагов 13 требуемое расстояние относительно тчика 9, после чего рейки 11 вновь .. ..«.(Чь жестко закрепляются фиксаторами 12. Включением дополнительного привода 7 обеспечивается перемещение датчика У в полосе проекции траверсы 2 на поверхность контролиру.емого изделия 23 и контроль этой части контролируемого изделия 23. При подходе к краю контролируемого изделия произойдет или сход следящего ролика t5 с контролируемого изделия 23 (фиг.4), или наезд его ца краевой выступ контролируемого изделия 23 (фиг.5), или встреча упорного ролика 16 со стенкой контролируемого изделия 23. В каждом из этих случаев произойдет отвод переключателя 17 от концевого выключателя 8, дополнительный привод 7 остановится, произойдет включение привода 6 траверсы 2,траверса передвинется на соседнюю полосу сканирования, затем согласно, программе привод 6 отключится, дополнительный привод 7 будет включен на реверсивное движение каретки 3, и каретка 3 нач|1ет перемещение датчика 9 по новой полосе сканирования. Одновременно L-образные рычаги 13 с псфющью дополнительных пружин 14 повернутся на дополнительных осях 21 и обеспечат кинематический контакт концевых выключателей 8 с переключателями 17. Таким образом, благодаря применению в устройстве для неразрушающего контроля реек с прикрепленньми к КИМ L-образными рычагами, снабженными следящими и упорными роликами и подпружиненными относительно р,еек, применению направляющей с подвижно установленной на ней кареткой и шарнирного прикрепления к каретке тележки с подпружиненным датчиком, S также применения переключателей концевых выключателей, установленных на свободных концах L-образных рычагов, представляется возможность автоматизации и расширяются технологические возможности контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения металлических деталей | 1981 |
|
SU1003977A1 |
| Сканирующее устройство дефектоскопа | 1979 |
|
SU974252A1 |
| Установка для многодуговой автоматической сварки | 1988 |
|
SU1722757A1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1691231A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Сканирующее устройство для дефектоскопии цилидрических изделий с тепловыми и кольцевыми канавками по окружности | 1986 |
|
SU1368770A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2001 |
|
RU2184372C1 |
| Телескопическая опора для приемника проникающего излучения | 1982 |
|
SU1052632A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Устройство для вырубки изделийиз РЕзиНы | 1977 |
|
SU806456A2 |

УСТРОЙСТЮ ДЛЯ НЕРАЗРУШАКЬ ЩЕГО КОНТРОЛЯ, содержащее станину, установленную подвижно на ней тра- . версу с кареткой, подвешенную к последней с помощью пружины тележку,, приводы траверсы и каретки, концевые выключатели и датчик, укрепленный на тележке, отличающеес я тем, что, с целью расширения технологических возможностей контроля, оно снабжено направлян1дей установленной на тележке параллельно рабочей поверхности датчика, двумя рейками, подвижно ра змейке в ньми в направляющей, ({фиксаторами реек, двумя L-образными рычагами, шарнирно :закрепленнь 1и по обе стороны датчика на концах реек к подпружиненными дополнительными пружинами относительно реек, подвижно соединенными с каждьм L-образHbw рычагом следяющими роликами и упорньки роликами, взаимодействующими в процессе- контроля с поверхностью контролируемого изделия, и переключателями концевых выключателей, закрепленными, на сво,бодных концах каждого L-образного рычага и кинематически связанными с .1 онцевыми выключателями, а концевые О) выключатели жестко закреплены на с: :свободном конце каждой рейки. ю ч «
АА
1
fe.J
-f-гт
.20 2tf3 uj.2
Фиг Л Фиг. 5
i§
2
Фиг. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ | 0 |
|
SU219850A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 1972 |
|
SU418795A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
