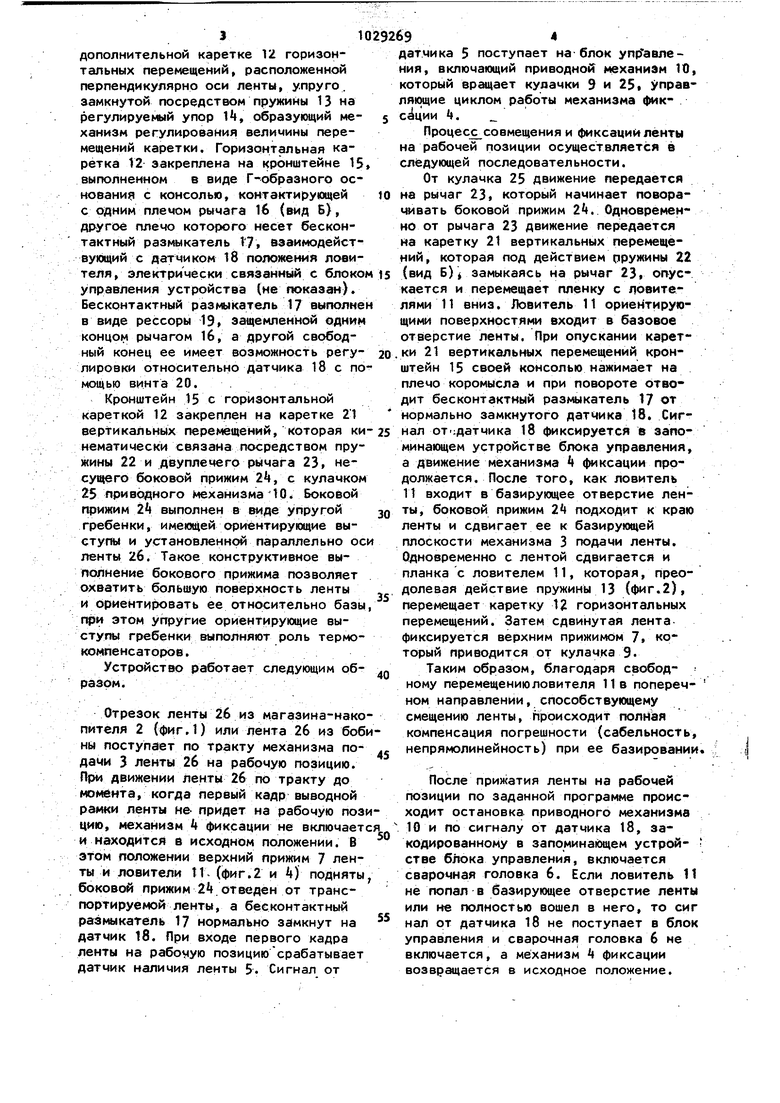
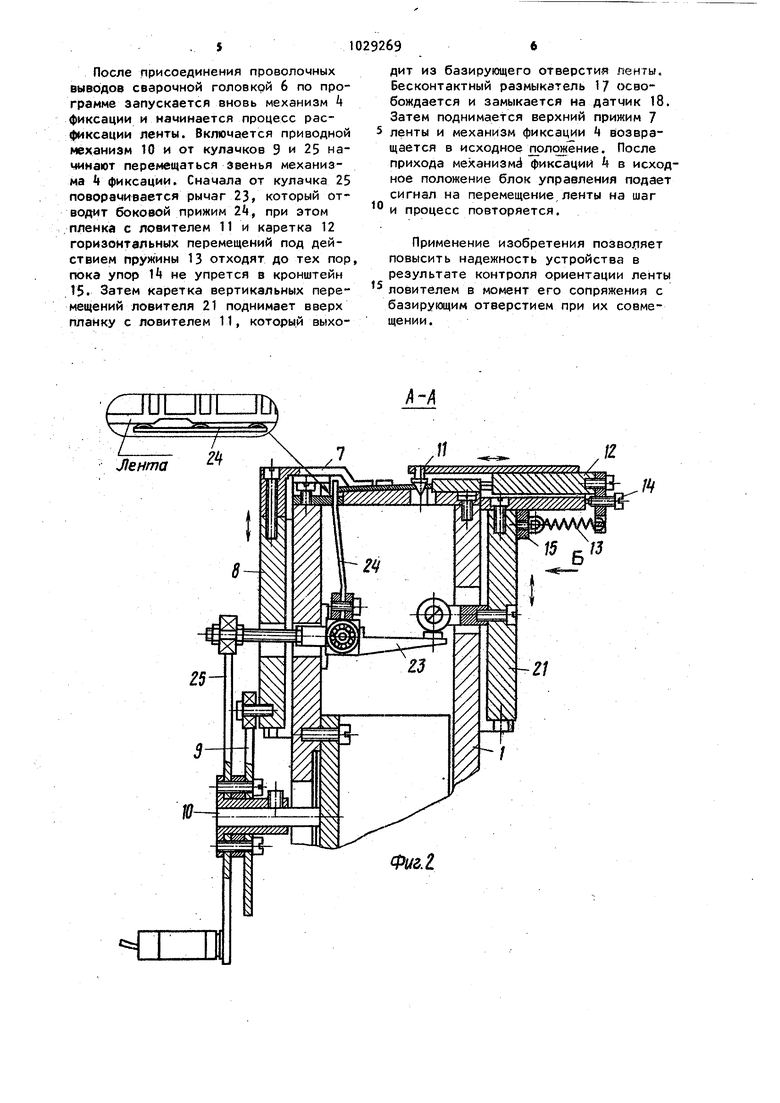
Изобретение относится к технологимескому оборудованию для производству полупроводниковых приборов и интегральных микросхем, в котбром используется перфорированная лента или ее отрезки с выводнмми рамками для монтажа полупроводниковых приборов. Известно устройство для перемещения ленты с контактными рамками полу проводниковых приборов, содержащее механизм совмещения ленты, состоящий из двух независимых прижимов, один из которых закреплен на корпусе, а другой выполнен подвижным для перемещенйя ленты к фиксатору (с целью обрааования петли при совмещении), под которым расположены закрепленные на каретке с вертикальной осью штыри-ловители t13 Недостатком этого устройства явля ется низкая точность совмещения, обу словленная тем, что лента ориентируется только по базирующим отверстиям с помощью штырей-ловителей. При этом не компенсируются погрешности, ар Иикакяцйе при сабельности ленты или при отсутствии в контактной рамк пенты базирующих отверстий. Кроме то то, в этом устройстве отсутствует контроль совмещения базирующих отверстий лент« с ловителями. Поэтому 8 момент совмещения ориентирующие прверхиости ловителя могут не сопрягаться с базовыми поверхностями отверстий ленты или же зажиматься в |Щл что приводит к неполному совмещению объектов. Устройство пригодно только для тонких пластичных лент, так как процесс ориентации требует петлеобразования на небольшой длине. Наиболее близким к предложенному по техническому решению является уст роист во перемещения и фиксации перфорированной ленты при монтаже полупроводниковых приборов, содержащее связанные с приводным механизмом механизм пошаговой подачи ленты и механизм фиксации ленты, содержащий боковой прижим ленты.и ловители, установленные на каретке вертикальный перемещений С2 . Недостатком этого устройства явля etcfl неудовлетворительная точность базирования, обусловленная тем, что ловители не имеют свободы перемещени в поперечном направлении ленты, что при наличии бокового прижима, сдвигающего ленты к базовой плоскости, ограничивает ее смещение и не позволяет эффективно компенсировать погрешности. Кроме того, устройство не обеспечивает контроль ориентации ленты ловителями в момент совмещения отрезка, что уменьшает надежность его работы. Цель изобретения - повышение точности и надежности фиксации ленты. Поставленная цель достигается тем, что устройство для перемещения и фиксации перфорированной ленты преимущественно при монтаже полупроводниковых приборов, содержащее связанные с приводны механизмом механизм пошаговой подачи ленты и механизм фиксации ленты, содержаций боковой прижим ленты и ловитель, установленный на каретке вертикальных перемещений, снабжено датчиком положения ловителя . и дополнительной кареткой, установленной на каретке вертикальных перемещений t возможност ью перемещения в горизонтальной плоскости перпендикулярно направлению перемещения ленты, Причем ловитель установлен на дополнительной каретке, а датчик положения ловителя и боковой прижим ленты связаны с кареткой вертикальных перемещений посредством подпружиненных двуплечих рычагов. При этом дополнительная каретка снабжена механизмом регулирования величины ее перемещения, а боковой прижим ленты выполнен в виде упругой гребенки. На фиг.1 изображено устройство, общий вид; на фиг,2 - разрез А-А на фиг.1; на фиг.З вид Б на фиг.2; на фиг., 5 и 6 - схема работы устройства. Устройство содержит корпус 1, на котором установлены магазины-накопи:тели 2, представляющие собой либо бобины (для ленты), либо секционные кассеты (для отрезков ленты), механизм 3 пошагов подачи ленты, связывающий между собой рабочие позиции устройства, на каждой из которых смонтированы механизм фиксации, датчик 5 наличия ленты и сварочные головки 6. Механизм k фиксации включает в себя верхний прижим 7 ленты (фиг.2), закрепленный на каретке вертикальных перемещений 8, кинематически связанной с кулачком 9 приводного механизма 10, ловитель 11, установленный на дополнительной каретке 1Z горизонтальных перемещений, расположенной перпендикулярно оси ленты, упруго, замкнутой посредством пружины 13 на регулируемый упор If, образующий механизм регулирования величины перемещений каретки. Горизонтальная каретка 12 закреплена на кронштейне 15 выполненном в виде Г-образного основани с консолью, контактирующей с одним плечом рычага 16 (вид Б}, другое плечо которого несет бесконтактный размыкатель 17, взаимодействующий с датчиком 18 положения ловителя, электрически связанный с блоко управления устройства (не показан). Бесконтактный размыкатель 17 выполне в виде рессоры 19 защемленной одним KOHuohi рычагом 16, а другой свободный конец ее имеет возможность регулировю1 относительно датчика 18 с по мощью винта 20. . Кронштейн 15 с горизонтальной кареткой 12 закреплен на каретке 21 вертикальнь(х перемещений, которая ки нематически связана посредством пружины 22 и двуплечего рычага 23, несущего боковой прижим 2k, с кулачком 25 приводного механизма 10 Боковой прижим 2t выполнен в виде упругой гребенки, имеющей ориентирующие выступы и установленной параллельно ос ленты 2б. Такое конструктивное выпсхпнение бокового прижима позволяет охватить большую поверхность ленты и ориентировать ее относительно базы при этом упругие ориентирующие выступы гребенки выполняют роль термокомпенсаторов. Устройство работает следующим образом. Отрезок ленты 26 из магазина-нако пителя 2 {фиг.1) или лента 26 из боб ны поступает по тракту механизма подачи 3 ленты 26 на рабочую позицию. При движении ленты 26 по тракту до момента, когда первый кадр выводной рамки ленты не- придет на рабочую поз цию, механизм t фиксации не включает и находится в исходном положении. В этом положении верхний приия м 7 ленты и ловители 11(фиг.2 и 4) подняты боковой прижим 2 . от веден от транспортируемой ленты, а бесконтактньЛ размыкатель 17 нормально замкнут на датчик 18. При входе первого кадра ленты на рабочую позициюсрабатывает датчик наличия ленты 5. Сигнал от атчика 5 поступает на блок управления, включающий приводной механизм 10, который вращает кулачки 9 и 25 управляющие циклом работы механизма фикс ции . Процесс совмещения и фиксации ленты на рабочей позиции осуществляется в следующей последовательности. От кулачка 25 движение передается на рычаг 23, который начинает поворачивать боковой прижим 2. Одновременно от рычага 23 движение передается на каретку 21 вертикальных перемещений, которая под действием пружины 22 (вид Б) замыкаясь на рычаг 23 оп ускается и перемещает пленку с ловителями 11 вниз. Ловитель 11 ориентирующими поверхностями входит в базовое отверстие ленты. При опускании каретки 21 вертикальных перемещений кронштейн 15 своей консолью нажимает на плечо коромысла и при повороте отводит бесконтактный размыкатель 17 от нормально замкнутого датчика 18. Сигнал от;датчика 18 фиксируется в запоминающем устройстве блока управления, а движение механизма фиксации продолжается. После того, как ловитель 11 входит в базирующее отверстие ленты, боковой прижим 2 подходит к краю ленты и сдвигает ее к базирующей плоскости механизма 3 подачи ленты. Одновременно с лентой сдвигается и планка с ловителем 11, которая, преодолевая действие пружины 13 (фиг.2), перемещает каретку 12 горизонтальных перемещений. Затем сдвинутая лента фиксируется верхним прижимом 7, который приводится от кулачка 9. Таким образом, благодаря свобод- ному перемещениюловителя Ив поперечном направлении, способствущему смещению ленты, п1эоисходиТ полная компенсация погрешности (сабельность, непрямолинейность) при ее базировании. После прижатия ленты на рабочей позиции по заданной программе происходит остановка приводного механизма 10 и по сигналу от датчика 18, закодированному в запоминакзщем устрой- стве блока управления, включается сварочная головка 6. Если ловитель 11 не попал в базирующее отверстие ленты или не полностью вошел в него то сиг нал от датчика 18 не поступает в блок управления и сварочная головка 6 не включается, а механизм 4 фиксации возвр ается в исходное положение.
После присоединения проволочных выводов сварочной головкой 6 по программе запускается вновь механизм 4 фиксации и начинается процесс расфиксаций ленты. Включается приводной механизм 10 и от кулачков 9 и 25 начинают перемещаться звенья механизма k фиксации. Сначала от кулачка 2S поворачивается рычаг 23, который отводит боковой прижим , при этом пленка с ловителем 11 и каретка 12 горизонтальных перемещений под действием пружины 13 отходят до тех пор пока упор И не упрется в кронштейн 15. Затем каретка вертикальных перемещений ловителя 21 поднимает вверх планку с ловителем 11, который выходит из базирующего отверстия пенты. Бесконтактный размыкатель 17 освобождается и замыкается на датчик 18. Затем поднимается верхний прижим 7 ленты и механизм фиксации Ц возвращается в исходное положение. После прихода механизме фиксаций k в исходное положение блок управления подает сигнал на перемещение,ленты на шаг и процесс повторяется.
Применение изобретения пoзвoJ яeт повысить надежность устройства в
результате контроля ориентации ленты ловителем в момент его сопряжения с базирующим отверстием при их совмещении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для присоединения кристаллов | 1979 |
|
SU790037A1 |
| Устройство для изготовления полых деталей из полосового и ленточного материала | 1983 |
|
SU1204302A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Устройство для двусторонней сетко-гРАфичЕСКОй пЕчАТи | 1978 |
|
SU843328A1 |
| Стенд для сборки под сварку изделий | 1982 |
|
SU1115873A1 |
| Устройство для перемещения радиоэлементов | 1980 |
|
SU949866A1 |
| АВТОМАТ ДЛЯ СВАРКИ | 1972 |
|
SU418298A1 |
| Устройство для упаковки полупроводниковых изделий с односторонними выводами | 1980 |
|
SU950600A1 |
| Устройство для обвязки пачек лентой | 1974 |
|
SU535189A1 |
| Способ сборки секций конденсаторов, устройство для проталкивания выводов секций конденсаторов в отверстия анодных колпачков, устройство для обрезания выводов секций конденсаторов и устройство для ориентации преимущественно анодных колпачков | 1989 |
|
SU1691901A1 |

(CJULJULJD
1 IIIPI j
Фиг.1
т
гг
.3
г
и
--I1
я V А
h
Ф«г.4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
